Potrebbero piacerti anche
- EM Simulators For PCB Design VerificationDocumento18 pagineEM Simulators For PCB Design VerificationPaul ShineNessuna valutazione finora
- MR Raghul Sasidharan S: Invoice DetailsDocumento1 paginaMR Raghul Sasidharan S: Invoice DetailsPaul ShineNessuna valutazione finora
- BillDesk Payment GatewayDocumento1 paginaBillDesk Payment GatewayPaul ShineNessuna valutazione finora
- Account Details For The User: 3130846689Documento1 paginaAccount Details For The User: 3130846689Paul ShineNessuna valutazione finora
- AWR VHF CouplersDocumento8 pagineAWR VHF CouplersAndrei SzilagyiNessuna valutazione finora
- NI Tutorial 3876 enDocumento5 pagineNI Tutorial 3876 enPaul ShineNessuna valutazione finora
- Second Order System LibreDocumento16 pagineSecond Order System LibrePaul ShineNessuna valutazione finora
- Qoppa Software Evaluation PDF Viewer HelpDocumento1 paginaQoppa Software Evaluation PDF Viewer HelpPrudhvi GowthamNessuna valutazione finora
- Eye Diagram Basics - Read... Ying Eye Diagrams - EDNDocumento7 pagineEye Diagram Basics - Read... Ying Eye Diagrams - EDNPaul ShineNessuna valutazione finora
- A Novel Passive Dual-Band Bandpass Microwave Filter Using Microstrip Loop ResonatorsDocumento4 pagineA Novel Passive Dual-Band Bandpass Microwave Filter Using Microstrip Loop ResonatorsPaul ShineNessuna valutazione finora
- Account Details For The User: 3130846689Documento1 paginaAccount Details For The User: 3130846689Paul ShineNessuna valutazione finora
- RF Lab Characterization EquipmentDocumento2 pagineRF Lab Characterization EquipmentPaul ShineNessuna valutazione finora
- A Broadband Low Noise Amplifier For X-Band ApplicationsDocumento3 pagineA Broadband Low Noise Amplifier For X-Band ApplicationsPaul ShineNessuna valutazione finora
- Quad Switch Trans SizingDocumento10 pagineQuad Switch Trans SizingPaul ShineNessuna valutazione finora
- Broadband LNA Design for Space ApplicationsDocumento4 pagineBroadband LNA Design for Space Applicationsprasad357Nessuna valutazione finora
- Full Text 02Documento116 pagineFull Text 02J Jesús Villanueva GarcíaNessuna valutazione finora
- Acknowledgement Slip: Your Unfinished Application Has Been Received by ADADocumento1 paginaAcknowledgement Slip: Your Unfinished Application Has Been Received by ADAPaul ShineNessuna valutazione finora
- Hot S22Documento22 pagineHot S22Paul ShineNessuna valutazione finora
- Advantages of Kathrein S Dipole Antennas Compared To Typical Printed Board SolutionsDocumento12 pagineAdvantages of Kathrein S Dipole Antennas Compared To Typical Printed Board SolutionsPaul ShineNessuna valutazione finora
- First Time RightDocumento11 pagineFirst Time RightPaul ShineNessuna valutazione finora
- First Time RightDocumento11 pagineFirst Time RightPaul ShineNessuna valutazione finora
- Lab5: Mixer: Group# Specifications For Mixer 900Mhz, 90-Degree 2Ghz, 90-Degree 3Ghz, 90-Degree 5Ghz, 90-DegreeDocumento6 pagineLab5: Mixer: Group# Specifications For Mixer 900Mhz, 90-Degree 2Ghz, 90-Degree 3Ghz, 90-Degree 5Ghz, 90-DegreePaul ShineNessuna valutazione finora
- Direct Sequence Vs Frequency HoppingDocumento2 pagineDirect Sequence Vs Frequency HoppingsagarkbeNessuna valutazione finora
- RF PA Equations ADSDocumento1 paginaRF PA Equations ADSPaul ShineNessuna valutazione finora
- Amps A Design PhilosophyDocumento18 pagineAmps A Design PhilosophyPaul ShineNessuna valutazione finora
- Noise Tutorial: Low-Frequency CMOS Analog Design: Rafael J. Betancourt-ZamoraDocumento30 pagineNoise Tutorial: Low-Frequency CMOS Analog Design: Rafael J. Betancourt-ZamoraPaul ShineNessuna valutazione finora
- Advantages of Kathrein S Dipole Antennas Compared To Typical Printed Board SolutionsDocumento12 pagineAdvantages of Kathrein S Dipole Antennas Compared To Typical Printed Board SolutionsPaul ShineNessuna valutazione finora
- LNADocumento54 pagineLNAkavyashree_pNessuna valutazione finora
- 12 VSWR MeasurementsDocumento23 pagine12 VSWR Measurementspkjhaiete100% (1)
- Debit Account Details: Inter Bank TransferDocumento1 paginaDebit Account Details: Inter Bank TransferPaul ShineNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- AtmDocumento2 pagineAtmJegan RichardNessuna valutazione finora
- Effects of Cryogenic Cooling on Grinding Forces, Temperature and Residual StressesDocumento9 pagineEffects of Cryogenic Cooling on Grinding Forces, Temperature and Residual StressesChirag JainNessuna valutazione finora
- Diamond Pin Locator and V Blocks 1Documento8 pagineDiamond Pin Locator and V Blocks 1pratik thakareNessuna valutazione finora
- Ulei Honda Jazz 1.4i CVTDocumento1 paginaUlei Honda Jazz 1.4i CVTcmlad1Nessuna valutazione finora
- Compressed Air SystemDocumento372 pagineCompressed Air SystemMauricioNessuna valutazione finora
- Compressed Air Fittings & Equipment Catalogue: Importers and Direct Sellers of Quality Hand ToolsDocumento18 pagineCompressed Air Fittings & Equipment Catalogue: Importers and Direct Sellers of Quality Hand ToolsVin KenNessuna valutazione finora
- RDSO - Vendor Directory July 16 FinalDocumento233 pagineRDSO - Vendor Directory July 16 Finalabhics6750% (2)
- FD-SOI and FinFET Technologies ComparedDocumento25 pagineFD-SOI and FinFET Technologies ComparedDhanishtha SinghNessuna valutazione finora
- Lecture - Force MethodDocumento73 pagineLecture - Force MethodF FNessuna valutazione finora
- MESL - Differential Equation 2Documento9 pagineMESL - Differential Equation 2Mark-Lorie Duculan NonesNessuna valutazione finora
- Heat 4e Chap02 LectureDocumento48 pagineHeat 4e Chap02 LectureAbdul MohsinNessuna valutazione finora
- P28 and P128 Series Lube Oil Controls With Built-In Time Delay RelayDocumento8 pagineP28 and P128 Series Lube Oil Controls With Built-In Time Delay RelayFreddy de los SantosNessuna valutazione finora
- Alcatel Support Document For Cable System in CubaDocumento11 pagineAlcatel Support Document For Cable System in CubaDEGNISSODENessuna valutazione finora
- HTML DOM TutorialDocumento11 pagineHTML DOM Tutorialapi-3819971100% (1)
- Boq Grand SummaryDocumento44 pagineBoq Grand Summaryelsabet gezahegnNessuna valutazione finora
- Boiler FormulasDocumento5 pagineBoiler FormulasAnonymous 6Mb7PZjNessuna valutazione finora
- Synchronization of GeneratorsDocumento3 pagineSynchronization of Generatorsneo_nitinNessuna valutazione finora
- As3000 Service Manual PDFDocumento180 pagineAs3000 Service Manual PDFsambadeeNessuna valutazione finora
- Um String Code 2 0 eDocumento46 pagineUm String Code 2 0 ehydrasearchNessuna valutazione finora
- Chapter 7 - Transient Heat Conduction PDFDocumento64 pagineChapter 7 - Transient Heat Conduction PDFhaqjmiNessuna valutazione finora
- Carbon Compounds: Standard/ Class/ Grade - 10 SSC, CBSE - 8 ICSEDocumento53 pagineCarbon Compounds: Standard/ Class/ Grade - 10 SSC, CBSE - 8 ICSEsaintEmNessuna valutazione finora
- HF Acid Processing Valves Technical SpecificationsDocumento4 pagineHF Acid Processing Valves Technical Specificationssemarasik_651536604Nessuna valutazione finora
- 2021 International Construction Benchmark Yearbook SAMPLE 1Documento10 pagine2021 International Construction Benchmark Yearbook SAMPLE 1Familia GonzalezNessuna valutazione finora
- Drum Unloading SystemDocumento2 pagineDrum Unloading SystemJas SumNessuna valutazione finora
- Laboratory Design GuideDocumento110 pagineLaboratory Design Guidejuly lang100% (5)
- IBM-Tandy Guide for Secret Weapons of the LuftwaffeDocumento41 pagineIBM-Tandy Guide for Secret Weapons of the Luftwaffetestinghb100% (1)
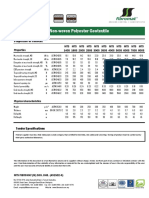
- FibrotexDocumento2 pagineFibrotexMan ChupingNessuna valutazione finora
- DF PDFDocumento8 pagineDF PDFAtif JaveadNessuna valutazione finora
- LDRDocumento4 pagineLDRRaymond ValdezNessuna valutazione finora
- Everything you need to know about your new washing machineDocumento20 pagineEverything you need to know about your new washing machinesenhbox4180Nessuna valutazione finora