Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Nexus R5 Wiring Diagram V1.0Documento2 pagineNexus R5 Wiring Diagram V1.0Hyeena AtNessuna valutazione finora
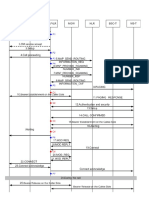
- 2g-Call FlowDocumento2 pagine2g-Call FlowGhazwan Salih100% (1)
- Computer Network VigneshDocumento75 pagineComputer Network VigneshVignesh VickyNessuna valutazione finora
- Kirisun PT6808 Trunking Mobile TransceiverDocumento2 pagineKirisun PT6808 Trunking Mobile TransceiverShaunVermaakNessuna valutazione finora
- Bus StandardsDocumento2 pagineBus Standardsweilong100% (1)
- Elct 120 Broadcast Technology: Midterm ExamDocumento7 pagineElct 120 Broadcast Technology: Midterm ExamShreyash Ankam0% (1)
- FCC Id 2ajgmbf-H6Documento8 pagineFCC Id 2ajgmbf-H6Duglan PontesNessuna valutazione finora
- Company Profile - ELV SolutionDocumento11 pagineCompany Profile - ELV SolutionAbdul QayyumNessuna valutazione finora
- MAN-PR5210 05052105 Rel 4 EN 3Documento90 pagineMAN-PR5210 05052105 Rel 4 EN 3AtaiasNessuna valutazione finora
- Enabling Secure Software-Defined Networking For Wireless and Cellular Networks Through VirtualizationDocumento7 pagineEnabling Secure Software-Defined Networking For Wireless and Cellular Networks Through VirtualizationParanthaman GNessuna valutazione finora
- Data Sheet: TDA1300T TDA1300TTDocumento20 pagineData Sheet: TDA1300T TDA1300TTahmedNessuna valutazione finora
- Pipenet: A Wireless Sensor Network For Pipeline MonitoringDocumento11 paginePipenet: A Wireless Sensor Network For Pipeline MonitoringMykola YarynovskyiNessuna valutazione finora
- Trust Raton Portatil 24059 Quickmanuals VA 3-0Documento4 pagineTrust Raton Portatil 24059 Quickmanuals VA 3-0sysvNessuna valutazione finora
- Sprabj 1Documento20 pagineSprabj 1Anonymous OFQuRiZOUzNessuna valutazione finora
- Quickspecs: HP Elitebook 8470P Notebook PC HP Elitebook 8570P Notebook PCDocumento46 pagineQuickspecs: HP Elitebook 8470P Notebook PC HP Elitebook 8570P Notebook PCzaenal mutaqinNessuna valutazione finora
- Pemanfaatan Teknologi IOT Untuk Pengukuran Transaksi Tenaga ListrikDocumento21 paginePemanfaatan Teknologi IOT Untuk Pengukuran Transaksi Tenaga ListrikĎĩmãśÃňNessuna valutazione finora
- 5G For Dummies Ebook PDFDocumento53 pagine5G For Dummies Ebook PDFandrianNessuna valutazione finora
- Invertek Drives ODE-3-120043-1F12-01 DatasheetDocumento2 pagineInvertek Drives ODE-3-120043-1F12-01 DatasheetSebastianNessuna valutazione finora
- I Report On Mobile CRM PDFDocumento17 pagineI Report On Mobile CRM PDFPradumna KasaudhanNessuna valutazione finora
- SWANDocumento45 pagineSWANBiswajit SahooNessuna valutazione finora
- Paximadis Nof 2021Documento6 paginePaximadis Nof 2021Joseph AgiusNessuna valutazione finora
- AnswerDocumento6 pagineAnswerYogesh DongreNessuna valutazione finora
- LANsDocumento43 pagineLANsHannah Esey Aquino PaquinNessuna valutazione finora
- TLRF QB UNIT Full QBDocumento54 pagineTLRF QB UNIT Full QBSri Nisha Tharani S100% (1)
- V12 HHTDocumento32 pagineV12 HHTLidetu AbebeNessuna valutazione finora
- Genesis II Select: User's Manual & Installation GuideDocumento10 pagineGenesis II Select: User's Manual & Installation GuideAlex MendozaNessuna valutazione finora
- DL850 DiagnosticsDocumento20 pagineDL850 DiagnosticssonotiumNessuna valutazione finora
- Chapter - 05 / Lecture - 03 / Osi - Tcp/IpDocumento10 pagineChapter - 05 / Lecture - 03 / Osi - Tcp/IpNagaraj VaratharajNessuna valutazione finora
- Ebx 2Documento17 pagineEbx 2deepakNessuna valutazione finora
- OptiX RTN XMC-3 ODUDocumento7 pagineOptiX RTN XMC-3 ODUmouqine100% (1)