I nt ernat i onal Journal of E mergi ng Trends & Technol ogy i n Comput er Sci ence (I JE TTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 1, Issue 4, November December 2012 ISSN 2278-6856
Vol ume 1 , I ssue 4 November - December 2 0 1 2 Page 1 6 1
Abstract: This paper represents a new technique for
designing 2D FIR digital filters with flat magnitude and
sharp transition band with low arithmetic complexity.
Considering wide range usage of filters with these parameters
in communication, signal processing, medicine and etc,
nowadays optimized designs of these filters has been
considered. In addition, filters with these details on cut off
band of high pass, band pass and band stop filters with
arbitrary pass band should be done extend. In order to
flatting the pass band, we used Gaussian approximation in
design FIR filters and concluded that ripple in pass band of
filters those were designed using Gaussian approximation
with attenuation constant coefficients in cut off band, were
less than filter designed with Parks_McClellan method and In
order to sharpen the transition band, filters frequency
response modeled by using of trigonometric functions of
frequency and transfer function calculated in time and
frequency domains. Typically we cannot design a 2D
filter from nonsymmetrical impulse response, then we
have create a 2D low pass FIR filter by using of
chebyshev polynomials.
Keywords: : Two-Dimension FIR filter, Flat Magnitude,
Sharp Transition Band, Nonsymmetrical Impulse
Response, Chebyshev Polynomials.
1. INTRODUCTION
Different ways has been applied for designing of two-
dimensional FIR digital filters. One of them is windows
way and another one is frequency transform. McClellan
has introduced frequency transform for symmetrical two-
dimensional FIR digital filters. By this way one-
dimension FIR digital filters transforms to two-dimension
filters by symmetrical impulse response by using of
transform frequency[1]. Also Karam defined two-
dimension filters with complex coefficients by transform
frequency. In this way, designed filters could have
complex coefficients and also he has generalized those
filters to multi-dimension filters. But none of those could
not be used in nonsymmetrical filters [2]. In this paper we
propose a new method for transforming frequency of one-
dimension FIR digital filters with nonsymmetrical
impulse response to state of two-dimension FIR digital
filters.
2. GAUSSIAN APPROXIMATION METHOD IN
DESIGN OF FIR FILTERS
In designing of a digital low pass FIR filter with
transition band of
c
and stop edge frequency of
s
,
filters frequency response present in ideal form in below
formula:
s
c
H
>
s
=
0
1
) ( (1)
One of the ways of approximation of ideal frequency
response is use of Gaussian functions
) ( ) ( ) (
i i r
i
G C H
- =
(2)
Where is the impulse unit function, * is the
convolution introducer and ) (
i
G is normal (Gaussian)
function[3],[4]
2
2
2
2
1
) (
= e G
i
i
(3)
i
In above formula is of Gaussian distribution.
Collection of Gaussian functions that approximate a FIR
filter presented in figure 1.
parameters
i i i
C , ,
formula,
) (
r
H
In should be chosen to
minimize the tolerance of approximation. For that,
Gappizi and his co-workers suggested [3]-[10]
) ( 735 . 0
c s
= (4)
In other word, they said is a constant coefficient and
presented
i
in below formula
num num i i
i
,..., 2 , 1 . 0 . 1 . 2 ,..., = A = (5)
Where
A
was calculated by
( ) = A 1 ln 2 2
2
(6)
Design a linear phase 2D low pass FIR digital
filter with flat magnitude and sharp transition
band with non symmetrical impulse response
Davood Ghaderi
1
, Niloufar Rajabiyoun
2
1,2
Department of Electrical and Electronic Engineering, Islamic Azad University,
International Jolfa Branch, Jolfa, Iran
I nt ernat i onal Journal of E mergi ng Trends & Technol ogy i n Comput er Sci ence (I JE TTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 1, Issue 4, November December 2012 ISSN 2278-6856
Vol ume 1 , I ssue 4 November - December 2 0 1 2 Page 1 6 2
)
2
1
( cos
1
1
0
A k
t
c
+ =
) ( 2
z
s
k
=
2
1
+ =
(
A
=
c
c
num
Max num
p p pm
k H
s s + = 0 cos
2
1 ) (
in above formula o is the maximum permissible ripple in
filters pass band,
( )
r
H
in result is
( )
( )
=
=
num
num i
r
i
e
Max
H
2
2
2
2
1
(7)
Also
(8)
By using of Inverse Fourier Transform, filter impulse
response comes from
(9)
Figure 1 Collection of Gaussian functions that
approximate a FIR filter
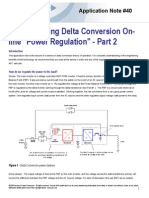
Fig. 2. presented a digital FIR filter with N=61 (N is FIR
filters order), 3 . 0 =
c
,
33 . 0 =
s
that designed by
Gaussian approximation and is showing a comparison
with a similar Parks_McClellan method and that showing
the ripple in pass band of filters those designed with
using of Gaussian approximation to attenuation constant
coefficients in cut off band are less than similar filters in
which designed with Parks_McClellan method.
3. FILTER DESINING
The proposed model for the pseudo-magnitude of the
filter transfer function is formulated for equiripple pass
band and sharp transition using trigonometric functions
of frequency[11],[12]. In the proposed model for a linear
phase, equiripple pass band, sharp transition, low pass
FIR filter the various regions of the filter response are
formulated as follow.
In the pass band region, the frequency response is:
) 10 (
Where the frequency variable,
( )
pm
H
is the pseudo-
magnitude of the filter response, o is pass band loss,
p
k
(a) (b)
Figure 2 Comparison Gaussian approximation (a) with
Parks_McClellan method (b)
an integer is a filter parameter in the pass band and
p
is
the end of ripple channel frequency.
Transition region spans part of the pass band
( )
p c
as
well as part of the stop band
( )
s z
where
c
is the
cutoff frequency and
s
e
is the stop band edge frequency.
In the transition region, the frequency response is
(11)
z p t pm
k A H s s = ) ( cos ) (
0
Where
t
k an integer is a filter parameter in the
transition region, A is amplitude parameter and is chosen
greater than 1, is the frequency at which ( )
pm
H
equals A,
z
is the frequency at which
( )
pm
H
is zero in
the stop band region.
In the stop band region, the frequency response :
s s =
z z s
s
pm
k H ) ( sin
2
) (
(12)
Where
s
is the stop band loss,
s
k is the filter parameter
in the stop band region.
From(10)
0 cos =
p p
k
(13)
P
p
L
k
2
=
(14)
Where L is odd, i.e., 1,3,5 to give negative slope due to
roll off.
(15)
) ( cos 0 ) (
0
= =
z t pm
k A H
) 16 (
) ( 2
0
=
z
t
k
) ( sin
2 2
) (
z s
s s
pm
k H
= =
(17)
(18)
From (11), ( ) 1 =
pm
H we obtain
(19)
Also,
(20)
Cut-off frequency
(21)
( )
( )
( )
(
+ =
=
num
i
i
n
n e
Max
n h
1
2
2
1
cos
1
2
) ( cos
1
0
=
p t
k
A
)
1
( cos )
1
(
1
0
A k
t
p
=
I nt ernat i onal Journal of E mergi ng Trends & Technol ogy i n Comput er Sci ence (I JE TTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 1, Issue 4, November December 2012 ISSN 2278-6856
Vol ume 1 , I ssue 4 November - December 2 0 1 2 Page 1 6 3
} ] cos cos ) 1 [(
) ( 2
sin
2
) cos
1
(cos 2
) ( 2
.
) ( 2
) cos( sin
)
2
1
(
2 2
2
2 2 2 2
z z s
k k
s
s s
p
p z t
t p
p p p
k k
k k
k
k
kA
k
A
A
k k
k k
A
k k
k k
k
k
k
N
h
s
+ =
+
}
+
=
d H n h
pm d
) (
2
1
) (
Stop band edge frequency
) 22 (
Transition region width
(
(
(
(
=
)
2
1
( cos )
2
( cos
1
1 1
A A k
s
t
c s
(23)
In the stop band,
) 24 (
t
z
z
k
k
2
) 1 4 (
0
+
+ =
Where ,... 2 , 1 , 0 k
z
= choose for 0 k
z
= narrowest
transition band of the low pass filter.
The magnitude response
( ) e
pm
H
is as shown in figure 3.
3.1 Impulse Response Coefficients
Let ( ) 1 0 , s s N n n h , be the impulse response of an N-
point linear phase FIR digital filter. The linear phase
condition implies that the impulse response satisfies the
symmetry condition [7],
(25)
The frequency response for a linear phase FIR filter for
odd N is given by:
(26)
Where the pseudo-magnitude response
( )
pm
H
is
(27)
The impulse response sequence determined by this
frequency response is obtained from
(a)
(b)
(c)
Figure 3 (a) Magnitude response of the proposed model
for low pass filter, (b) Magnitude view of the pass band,
(c) Magnitude view of the stop band
(28)
The impulse response coefficients h(n) for the resultant
filter are obtained by evaluating the integral (28) using
equations (10), (11) and (12). Modeling the pseudo-
magnitude response , ( ) e
pm
H
in the pass band region,
transition region and the stop band region respectively.
According that, we obtain the impulse response
coefficients as
(29)
4. Designing Two-dimension FIR Digital
Filters With Flat Magnitude and Sharp
Transition Band
Transfer function of a one-dimension linear digital FIR
filter comes from bellows formula
=
N
n
n
Z n h Z H
0
) ( ) (
(30)
Totally H(z) a filters transformations function suppose
with a nonsymmetrical impulse response where as every
function could be written as set of one even function and
a odd function, therefore H(z) could be written like bellow
) ( ) ( ) ( Z H Z H Z H
a S
+ =
(31)
Which in it ( ) z H
s
related to transformation function of a
filter with a even symmetrical impulse response and
( ) z H
a
related to transform function of a filter is a odd
symmetrical impulse response.
( ) z H
s
and
( ) z H
a
could
be reached by bellow form1 2 ula:
)) ( ) ( (
2
1
) (
1
+ = Z H Z Z H Z H
N
s
(32)
)) ( ) ( (
2
1
) (
1
= Z H Z Z H Z H
N
a
Filters frequency response comes out from below formula
)
2
( cos
1
1
0
A k
s
t
s
+ =
,.... 2 , 1 , 0 , ) 1 ( ) ( = = n n N h n h
) ( . ) (
)
2
1
(
pm
N
j
j
H e e H
=
)
2
1
(
1
cos )
2
1
( 2 )
2
1
( ) (
N
n
pm
n n
N
h
N
h H
z s
s
s
t p
p
k
k k
A A
k
n
h
cos
2
1
2
)
2
1
(
2
+ + =
I nt ernat i onal Journal of E mergi ng Trends & Technol ogy i n Comput er Sci ence (I JE TTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 1, Issue 4, November December 2012 ISSN 2278-6856
Vol ume 1 , I ssue 4 November - December 2 0 1 2 Page 1 6 4
( ) ( ) ( ) ( )
0 0
2
a s
N
j
j
jH H e e H + =
(33)
In which in it
( ) ( )
( ) ( ) ( ) ( ) M N n b H
n a H
M
n
n s
M
n
n s
2 cos sin
cos
0
0
0
= =
=
=
=
(34)
Now we can develop ( ) n cos e according to ( ) cos by
chebicev polynomial
( ) ( ) ( ) cos cos
n
T n = (35)
So we can write frequency response of a favorite filter as
below
( ) ( ) ( )
( ) ( ) ( )] cos cos 1
cos [
1
0
2
0
=
=
+ =
M
n
n n
M
n
n n
jM j
T b
T a e e H
(36)
By above formula clearly you can see we can transform
above-mentioned filters to a two-dimension FIR digital
filter by replacing
cos(w)
with two-dimension function
like ( )
2 1
, F . Every function which comes with
( ) 1 ,
2 1
s F
condition could be used. But as a some
limitation of Karam [2] bellows condition must be applied
with above-mentioned condition
(a)
(b)
Figure 4 designed 2-dimension flat magnitude filter
comparison (b) with conventional filters in cutoff
frequency (a)
( ) ( )
2 1 2 1
, , F F = (37)
With above-mentioned condition as an example we can
use bellows function
) cos( ) cos(
2
1
) cos(
2
1
) cos(
2
1
2
1
) , (
2 1 2 1 2 1
+ + + = F
(38)
5. Simulation Results
In this part we present some of simulation which has been
done in this field.
Figure 5 Two-dimension designed filter in cutoff
frequency 25 . 0
Figure 6 designed filter with conventional ones
comparison in cutoff frequency 25 . 0
5. Conclusion
The comparison between Figure 4(a) and 4(b), we can see
the magnitude of the filter which designed by frequency
transformation method is flatter than pass band of filter
which designed by conventional methods. According to
[12] with a trigonometric method we can design a sharp
transition band filter and according to our method a new
model is introduced to produce a 2D low pass FIR filter
with flat magnitude and sharp transition band using
simple mathematical formulas and linear phase. we
concluded that , ripple in pass band of filters designed
using Gaussian approximation with attenuation constant
coefficients in cut off bands are less than filters designed
with parks-McClellan method. Above mentioned design
has been done by MATLAB software, and eventually our
results were close to the theoretical results including
I nt ernat i onal Journal of E mergi ng Trends & Technol ogy i n Comput er Sci ence (I JE TTCS)
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 1, Issue 4, November December 2012 ISSN 2278-6856
Vol ume 1 , I ssue 4 November - December 2 0 1 2 Page 1 6 5
ripple maximum 0.005db in pass band and 03 . 0 in
transition band.
REFERENCES
[1] J.H.McClellan, The Design of Two-Dimensional
digital filter by transformations, in prov. 7th Annual
Princeton Conf. on Inform. Sci. and Sys., pp.247-
251, 1973.
[2] L.J. Karam, Design pf Complex
multidimensional FIR filters by Transformations ,
IEEE Proceedings.
[3] T.I. Laakso, V. Valimaki, M.Karajalainen, and
U.K Laian, Splitting the unit delay, IEEE Signal
processing Mag. Vol. 13, pp. 30-35, jan 1998.
[4] I.W. Selesnick and C.S. Burrus, Maximally flat
low-pass FIR filters with reduced delay IEEE Trans.
Circuits Syst. II, vol.45, pp. 53-68 , Jan 1998.
[5] S. Samdi, I. Nishihara and H. iwakura, Universal
maximally flat iow-pass FIR systems , IEEE Transe.
Signal processing, vol. 48, pp 1956-1964, july 2000 .
[6] O. Herrmann, un approximation program in no
recursive digital filter design, IEEE Trans Circuit
theory, vol. CT- 18, pp. 411-413, May 1971.
[7] H. Baher, FIR digital filters with simultaneous
conditions on amplitude and group delay Electron.
Lett., vol. 18, pp. 296-301, Apr. 1982.
[8] R. I. Gopinath, Least squared error FIR filters
with flat amplitude or group delay constraints ,
IEEE Signal Processing, Lett. Nov. 2002 .
[9] R. I. Gopinath, Low-pass Delay Filters with Flat
Magnitude and Group Delay Constraints , IEEE
Trans. Signal Processing, vol. 51, pp. 182-192, Jan.
2003.
[10] J. S. Lim, Two Dimensional Signal and Image
Processing , Englewood Cliffs, NG:Premtice Hall,
1990.
[11] Pardeep Kaur, Optimization of FIR Filters
Design using Genetic Algorithm, International
journal of Emerging Trends& technology in
computer science(IJETTSC), Volume 1, Issue 3, pp.
228-232, September October 2012.
[12] J. Rodrigues, Synthesis of Linear Phase Sharp
Transition FIR Digital Filter, ECTI Transaction on
Computer and Information Technology vol.1, no.2
November, pp. 96-99, 2005
AUTHOR
Davood Ghaderi received the B.S and
M.S. degrees in Electrical Engineering from
Islamic Azad University, Tabriz Branch, Iran,
in 2006 and 2009, respectively. From 3 years
ago he had begun a wide research in field of
ideal filters in FIR & IIR domains and
expanding them to optical devices. His favorite
fields are DSP, filters and image and signal
processing and have several papers and survey projects in these
fields. He had taught in different branches of Islamic Azad
University in Iran, such as Jolfa and Ahar branches from five
years ago.
Niloufar Rajabiyoun received the B.S.
and M.S. degrees in Electrical
Engineering from Engineering Faculty
of Islamic Azad University, Tabriz
Branch, Iran, in 2006 and 2009,
respectively. Her main field in M.S. was
speech signals and Blind Source Separation (BSS)
analysis and has extensive study in these fields with more
than 10 different papers and survey projects. She had
taught in different branches of Islamic Azad University
and private institutes of technology in Iran, from four
years ago.
Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocumento6 pagineDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocumento12 pagineStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocumento7 pagineTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocumento9 pagineAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- The Mexican Innovation System: A System's Dynamics PerspectiveDocumento12 pagineThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocumento6 pagineAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Soil Stabilization of Road by Using Spent WashDocumento7 pagineSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Performance of Short Transmission Line Using Mathematical MethodDocumento8 paginePerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocumento8 pagineDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocumento10 pagineStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- A Deep Learning Based Assistant For The Visually ImpairedDocumento11 pagineA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Documento10 pagineA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocumento9 pagineSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocumento8 pagineImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Ijaiem 2021 01 28 6Documento9 pagineIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocumento13 pagineDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocumento5 pagineSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocumento9 pagineAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocumento5 pagineThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Clearing of Electrical PlansDocumento3 pagineClearing of Electrical PlansPatty GorospeNessuna valutazione finora
- Digital Electronics Ece 213 PDFDocumento15 pagineDigital Electronics Ece 213 PDFAlisha AgarwalNessuna valutazione finora
- T6S 800 PR221DS-LS/I in 800 3p F FDocumento3 pagineT6S 800 PR221DS-LS/I in 800 3p F FP&D CarmehilNessuna valutazione finora
- CpuDocumento14 pagineCpuPranshu021Nessuna valutazione finora
- Deltalite II 2510-4: Neodymium SeriesDocumento2 pagineDeltalite II 2510-4: Neodymium SeriesAji VerdeNessuna valutazione finora
- 390Documento1 pagina390aqobumNessuna valutazione finora
- AEM 30-6310 ManualDocumento15 pagineAEM 30-6310 ManualCarlz0rNessuna valutazione finora
- LPBDocumento6 pagineLPBalbertoNessuna valutazione finora
- خطوات عمل جداول الحسابات Panel SchedulesDocumento6 pagineخطوات عمل جداول الحسابات Panel SchedulesMOAZ ASHRAFNessuna valutazione finora
- Tariel Kapanadze CoilDocumento5 pagineTariel Kapanadze Coilharishkumarsingh0% (1)
- 3G Channel Element at r99 Hsdpa HsupaDocumento4 pagine3G Channel Element at r99 Hsdpa HsupaZteTems OptNessuna valutazione finora
- IL300Documento11 pagineIL300Sreerag Kunnathu SugathanNessuna valutazione finora
- Microsemi PolarFire FPGA JESD204B Interface Demo Guide DG0755 V9Documento35 pagineMicrosemi PolarFire FPGA JESD204B Interface Demo Guide DG0755 V9Ivan Vera de los SantosNessuna valutazione finora
- EM2 - Final - Lecture 06ADocumento16 pagineEM2 - Final - Lecture 06AShoaib KhanNessuna valutazione finora
- 5V 1A Mini/Micro USB 18650 Lithium Battery Charger Board Module TP4056Documento5 pagine5V 1A Mini/Micro USB 18650 Lithium Battery Charger Board Module TP4056francesco marincolaNessuna valutazione finora
- FireCR-Dental User-Manual en 140216Documento42 pagineFireCR-Dental User-Manual en 140216eduardoNessuna valutazione finora
- Ups Part 2Documento5 pagineUps Part 2NeztopNessuna valutazione finora
- Amc 1117Documento9 pagineAmc 1117Hoang LeNessuna valutazione finora
- CLP DatasheetDocumento1 paginaCLP DatasheetRoberto Lauro Hernandez RiveraNessuna valutazione finora
- GSCC014 LV - Concentric Cables Rev 0Documento54 pagineGSCC014 LV - Concentric Cables Rev 0zambito2012Nessuna valutazione finora
- Tle 8 DahliaDocumento6 pagineTle 8 DahliaRomualdo TubarNessuna valutazione finora
- ECE137Documento6 pagineECE137Jonathan Zabala Jr.Nessuna valutazione finora
- Internet of Things: Jarrod Trevathan, PHD, Simon Schmidtke, Wayne Read, PHD, Tony Sharp, Abdul Sattar, PHDDocumento18 pagineInternet of Things: Jarrod Trevathan, PHD, Simon Schmidtke, Wayne Read, PHD, Tony Sharp, Abdul Sattar, PHDhighfive pologeeNessuna valutazione finora
- BU 1 Plumbing (1) Online ReviewerDocumento5 pagineBU 1 Plumbing (1) Online ReviewerIan UntalanNessuna valutazione finora
- Price ListDocumento118 paginePrice ListHemant GuptaNessuna valutazione finora
- Kokm For Gis - 1vlc000609 Rev.4, enDocumento24 pagineKokm For Gis - 1vlc000609 Rev.4, enTetianaNessuna valutazione finora
- 3.4 Diagnosis Code and Backup: 0.5V Boost Sensor 4.8VDocumento1 pagina3.4 Diagnosis Code and Backup: 0.5V Boost Sensor 4.8VchinhNessuna valutazione finora
- A High-Sensitivity Flexible-Excitation Electrical Capacitance Tomography System - C Gamio PHD ThesisDocumento221 pagineA High-Sensitivity Flexible-Excitation Electrical Capacitance Tomography System - C Gamio PHD ThesisCarlos GamioNessuna valutazione finora
- Renewable and Sustainable Energy Reviews: Hegazy Rezk, Ahmed Fathy, Almoataz Y. AbdelazizDocumento10 pagineRenewable and Sustainable Energy Reviews: Hegazy Rezk, Ahmed Fathy, Almoataz Y. AbdelazizDany ApablazaNessuna valutazione finora
- MT QP 10 EssDocumento1 paginaMT QP 10 EssanurekharNessuna valutazione finora