Potrebbero piacerti anche
- CNC Machine Design FeaturesDocumento63 pagineCNC Machine Design FeaturesmahavircNessuna valutazione finora
- Topic 11Documento41 pagineTopic 11Felipe Soares MaiaNessuna valutazione finora
- Mechanical Vibration Ch-6Documento34 pagineMechanical Vibration Ch-6Befikad BekeleNessuna valutazione finora
- Precision Machine DesignDocumento56 paginePrecision Machine DesignFelipe Soares MaiaNessuna valutazione finora
- Machine Tool Vibration and DampersDocumento42 pagineMachine Tool Vibration and DampersGeofrey L PaulNessuna valutazione finora
- Inspection of HYDRO SM fleet machines reveals wear issuesDocumento28 pagineInspection of HYDRO SM fleet machines reveals wear issuesEdsonLuizPoleselloNessuna valutazione finora
- Roll FormingDocumento16 pagineRoll FormingrafaelgomezmorenoNessuna valutazione finora
- Rolling: Metal Working ProcessDocumento63 pagineRolling: Metal Working ProcessRohit SinghalNessuna valutazione finora
- CNC New Syllabus TopicsDocumento51 pagineCNC New Syllabus TopicsVISMAY PATEL100% (1)
- Training Program On: Vibration Monitoring, Alignment and Balancing Triveni Reliability Services and Training AcademyDocumento77 pagineTraining Program On: Vibration Monitoring, Alignment and Balancing Triveni Reliability Services and Training AcademyMithlesh SharmaNessuna valutazione finora
- MOOG - JRA1 Actuation at MoogDocumento32 pagineMOOG - JRA1 Actuation at MoogBazlur Rahman SohelNessuna valutazione finora
- Ch-3 2Documento37 pagineCh-3 2Haftamu HilufNessuna valutazione finora
- Extrusión-Rolling and Forming ProcessDocumento50 pagineExtrusión-Rolling and Forming Processquiron2010Nessuna valutazione finora
- Computer Controlled Machine Maintenance (Mechanical) FailuresDocumento23 pagineComputer Controlled Machine Maintenance (Mechanical) Failuressank_knasNessuna valutazione finora
- U 2, Hot&ColdWorking Forging RollingDocumento50 pagineU 2, Hot&ColdWorking Forging RollingSaiduthNessuna valutazione finora
- Weight Deformation: by Bharath Ram Roll No:4 College of Engineering TrivandrumDocumento10 pagineWeight Deformation: by Bharath Ram Roll No:4 College of Engineering TrivandrumBharath RamNessuna valutazione finora
- Geometry: ICEM CFD Introductory CourseDocumento17 pagineGeometry: ICEM CFD Introductory CourseCarlos GomezNessuna valutazione finora
- ME 551 - 08 Flexures (Rev. 1.1)Documento15 pagineME 551 - 08 Flexures (Rev. 1.1)Vishal PawarNessuna valutazione finora
- Electric Submersible Pump GuideDocumento40 pagineElectric Submersible Pump GuideMoataz Mahmoud El Demerdash100% (1)
- 1 25MWDocumento33 pagine1 25MWmadivala nagarajaNessuna valutazione finora
- Unit-Iii Constructional Features of CNC MachinesDocumento33 pagineUnit-Iii Constructional Features of CNC MachinesMuthuvel MNessuna valutazione finora
- Stator and Rotor Design Considerations For Integral HP Machines - Austin BonnettDocumento109 pagineStator and Rotor Design Considerations For Integral HP Machines - Austin BonnettvishiwizardNessuna valutazione finora
- Clutches and Brakes 0Documento16 pagineClutches and Brakes 0Mohamad SleimanNessuna valutazione finora
- Application of Chain Drive and Its Selection Method in AutomobileDocumento18 pagineApplication of Chain Drive and Its Selection Method in AutomobileSankit IngaleNessuna valutazione finora
- Application of Chain Drive and Its Selection Method in AutomobileDocumento18 pagineApplication of Chain Drive and Its Selection Method in AutomobileSumedh sonawaneNessuna valutazione finora
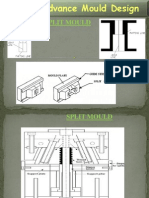
- Advance Mould DesignDocumento35 pagineAdvance Mould DesignKamal Krishna Kashyap100% (6)
- Web Tension Control Systems GuideDocumento24 pagineWeb Tension Control Systems GuideSudhakar JoshiNessuna valutazione finora
- Technical Analysis of BakerDocumento27 pagineTechnical Analysis of BakerManu KhodNessuna valutazione finora
- Machine Tool Vibration: Causes, Effects and ControlDocumento42 pagineMachine Tool Vibration: Causes, Effects and ControlLuis NunesNessuna valutazione finora
- ND Project Presentation by Wayne Miles MoyoDocumento16 pagineND Project Presentation by Wayne Miles MoyoWayne Miles Rooneey MoyoNessuna valutazione finora
- Brake Systems: Energy Conversion ManagementDocumento43 pagineBrake Systems: Energy Conversion ManagementAshish PariharNessuna valutazione finora
- BearingsDocumento48 pagineBearingsgaurav tiwariNessuna valutazione finora
- Condition Monitoring For ElectricalDocumento28 pagineCondition Monitoring For ElectricalArindam SamantaNessuna valutazione finora
- Bumper Systems - An IntroductionDocumento25 pagineBumper Systems - An IntroductionMichaelNessuna valutazione finora
- Forging For ClassDocumento44 pagineForging For ClassNABIL HUSSAINNessuna valutazione finora
- Technology that inspires precise rotary indexing tablesDocumento40 pagineTechnology that inspires precise rotary indexing tablesJesus Hernandez AmezcuaNessuna valutazione finora
- Design of ClutchDocumento47 pagineDesign of Clutchjoyelpaul100% (1)
- Acri PresentationDocumento10 pagineAcri PresentationdskjajkdsaNessuna valutazione finora
- Chapter 3 TYPICAL DAMAGES OF MACHINE PARTSDocumento19 pagineChapter 3 TYPICAL DAMAGES OF MACHINE PARTSOusman ToficNessuna valutazione finora
- Design & Analysis of Cam ShaftDocumento38 pagineDesign & Analysis of Cam ShaftVijiNessuna valutazione finora
- Iv RepotDocumento16 pagineIv Repotneethurj9Nessuna valutazione finora
- Element of CNC MachinesDocumento60 pagineElement of CNC MachinesGururaj Gadad100% (3)
- Elemen Mesin Rem PDFDocumento46 pagineElemen Mesin Rem PDFM Fathin NaufalNessuna valutazione finora
- Lecture 2 Tension MembersDocumento55 pagineLecture 2 Tension Memberssamiullah034050100% (1)
- Alignment and Types Prepeard by InzamamDocumento58 pagineAlignment and Types Prepeard by InzamamUsama ArifNessuna valutazione finora
- 3650x200 Es-11115 PDFDocumento12 pagine3650x200 Es-11115 PDFmpcd07Nessuna valutazione finora
- Block FoundationDocumento16 pagineBlock FoundationMai Kawayapanik100% (7)
- The Effects of DC Machine Adjustment On Loop Balance - Jun 08Documento91 pagineThe Effects of DC Machine Adjustment On Loop Balance - Jun 08Rohan ArthurNessuna valutazione finora
- Metal Cutting. PDocumento20 pagineMetal Cutting. PamankwasimNessuna valutazione finora
- Friction GuidewaysDocumento13 pagineFriction Guidewaysyummit100% (1)
- Carlos Vega Rework Done-2Documento12 pagineCarlos Vega Rework Done-2Carlos Arturo Vega LebrúnNessuna valutazione finora
- How To Make A TribometerDocumento7 pagineHow To Make A TribometerHamza ShamsNessuna valutazione finora
- Limits and FitsDocumento26 pagineLimits and FitsHassan AwaisNessuna valutazione finora
- Machine Design Elements and AssembliesDa EverandMachine Design Elements and AssembliesValutazione: 3.5 su 5 stelle3.5/5 (2)
- Performance Exhaust Systems: How to Design, Fabricate, and Install: How to Design, Fabricate, and InstallDa EverandPerformance Exhaust Systems: How to Design, Fabricate, and Install: How to Design, Fabricate, and InstallValutazione: 4 su 5 stelle4/5 (8)
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsDa EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsNessuna valutazione finora
- GM Automatic Overdrive Transmission Builder's and Swapper's GuideDa EverandGM Automatic Overdrive Transmission Builder's and Swapper's GuideValutazione: 4.5 su 5 stelle4.5/5 (8)
- Brunch: Menu OnlineDocumento1 paginaBrunch: Menu OnlineFelipe Soares MaiaNessuna valutazione finora
- Fact sheet on establishing a profitable snail farmDocumento4 pagineFact sheet on establishing a profitable snail farmFelipe Soares MaiaNessuna valutazione finora
- E - Physically Based Modeling, Principles and Practice - Implicit Methods For Differential EquationsDocumento5 pagineE - Physically Based Modeling, Principles and Practice - Implicit Methods For Differential EquationsFelipe Soares MaiaNessuna valutazione finora
- C - Physically Based Modeling, Principles and Practice - Particle System DynamicsDocumento13 pagineC - Physically Based Modeling, Principles and Practice - Particle System DynamicsFelipe Soares MaiaNessuna valutazione finora
- Topic 18bDocumento25 pagineTopic 18bFelipe Soares MaiaNessuna valutazione finora
- Bearing Mounting Methods. Métodos de Montaje de Rodamientos SKFDocumento12 pagineBearing Mounting Methods. Métodos de Montaje de Rodamientos SKFTeckelino100% (1)
- Precision Machine Design: Topic 19 Power Transmission System RequirementsDocumento26 paginePrecision Machine Design: Topic 19 Power Transmission System RequirementsFelipe Soares MaiaNessuna valutazione finora
- F - Physically Based Modeling, Principles and Practice - Constrained DynamicsDocumento13 pagineF - Physically Based Modeling, Principles and Practice - Constrained DynamicsFelipe Soares MaiaNessuna valutazione finora
- DiffEQ Basics NotesbDocumento9 pagineDiffEQ Basics Notesbchristopher_kephart1Nessuna valutazione finora
- Topic 18cDocumento5 pagineTopic 18cFelipe Soares MaiaNessuna valutazione finora
- Linear GuidesDocumento76 pagineLinear GuidesFelipe Soares MaiaNessuna valutazione finora
- Topic 18aDocumento24 pagineTopic 18aFelipe Soares MaiaNessuna valutazione finora
- Topic 17Documento20 pagineTopic 17Felipe Soares MaiaNessuna valutazione finora
- Topic 18aDocumento24 pagineTopic 18aFelipe Soares MaiaNessuna valutazione finora
- Topic 4Documento35 pagineTopic 4Felipe Soares MaiaNessuna valutazione finora
- Entrelec DIN RailsDocumento5 pagineEntrelec DIN RailsFelipe Soares MaiaNessuna valutazione finora
- Topic 1Documento42 pagineTopic 1Felipe Soares MaiaNessuna valutazione finora
- An Overview of Cell-Level ATM Network SimulationDocumento13 pagineAn Overview of Cell-Level ATM Network SimulationSandeep Singh TomarNessuna valutazione finora
- GAGLIANO, Monica - Tuned In-Plant Roots Use Sound To Locate WaterDocumento10 pagineGAGLIANO, Monica - Tuned In-Plant Roots Use Sound To Locate WaterLucas FilipeNessuna valutazione finora
- Direct Tensile Test of ConcreteDocumento7 pagineDirect Tensile Test of ConcreteBunkun15100% (1)
- Dev ListDocumento8 pagineDev ListAjdin SuljakovićNessuna valutazione finora
- InRoom Install 1107 PDFDocumento83 pagineInRoom Install 1107 PDFRolandoNessuna valutazione finora
- Muzharul Islam, Kalm and Architecture Bangladesh: If IfDocumento9 pagineMuzharul Islam, Kalm and Architecture Bangladesh: If IfAbdullah Al-AzwadNessuna valutazione finora
- 9A04306 Digital Logic Design4Documento4 pagine9A04306 Digital Logic Design4Mahaboob SubahanNessuna valutazione finora
- Quiz 2 KeyDocumento2 pagineQuiz 2 KeyjaganathapandianNessuna valutazione finora
- Duta Nusantara, Dutamas RM 4,200,000: Dylan NGDocumento4 pagineDuta Nusantara, Dutamas RM 4,200,000: Dylan NGganmalNessuna valutazione finora
- Install and Configure Certificate Authority in Windows Server 2016Documento23 pagineInstall and Configure Certificate Authority in Windows Server 2016tinhtunaungNessuna valutazione finora
- Curriculum Structure Semester - VII: SHIVAJI UNIVERSITY, KOLHAPUR - Syllabus W.E.F. 2014 - 15Documento35 pagineCurriculum Structure Semester - VII: SHIVAJI UNIVERSITY, KOLHAPUR - Syllabus W.E.F. 2014 - 15AsdfgNessuna valutazione finora
- 06 08 07Documento7 pagine06 08 07Hutanu GabrielNessuna valutazione finora
- Carpentry TheoryDocumento8 pagineCarpentry Theoryapi-272982037Nessuna valutazione finora
- Samsung LED Lighting Products CatalogueDocumento27 pagineSamsung LED Lighting Products CatalogueRebecca Reeves0% (1)
- Siemens Rde IDocumento2 pagineSiemens Rde Igonzo2025Nessuna valutazione finora
- Drainage Work ChecklistDocumento4 pagineDrainage Work ChecklistAlaa AliNessuna valutazione finora
- HR Analytics Source Tables Usages PDFDocumento17 pagineHR Analytics Source Tables Usages PDFraokumar2Nessuna valutazione finora
- AAA Network Security ServicesDocumento20 pagineAAA Network Security ServicesSandeep Kushwaha100% (1)
- Mini Project "DESIGN OF BLAST RESISTANT STRUCTURES"Documento35 pagineMini Project "DESIGN OF BLAST RESISTANT STRUCTURES"Chetan ChavanNessuna valutazione finora
- Print Lesson PlanDocumento6 paginePrint Lesson Planapi-297789042100% (1)
- Ref Guide Surface Prep Req-EnDocumento4 pagineRef Guide Surface Prep Req-EnRyanNessuna valutazione finora
- Install and Config Primavera Contract Management For OracleDocumento30 pagineInstall and Config Primavera Contract Management For OracleUjjal RegmiNessuna valutazione finora
- 15 Most Beautiful Palaces in The World (With Map) - TouropiaDocumento1 pagina15 Most Beautiful Palaces in The World (With Map) - Touropiapinar gecerNessuna valutazione finora
- Compact Floor Plan LayoutDocumento4 pagineCompact Floor Plan LayoutShekh Muhsen Uddin AhmedNessuna valutazione finora
- SMACNA CAD StandardDocumento12 pagineSMACNA CAD StandardDenan SaherNessuna valutazione finora
- FS-8700-62 J-Bus: Driver ManualDocumento14 pagineFS-8700-62 J-Bus: Driver ManualEric DunnNessuna valutazione finora
- Precast Concrete Pipe Rack DesignDocumento43 paginePrecast Concrete Pipe Rack DesignAmanpreet Singh67% (3)
- Optimize Energy Usage with MPC-143's Power Saving ModesDocumento31 pagineOptimize Energy Usage with MPC-143's Power Saving ModesMehdi BouzariNessuna valutazione finora
- Retrofit: Chapter I - 1Documento24 pagineRetrofit: Chapter I - 1Jhon Lerry SungaNessuna valutazione finora