Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- 7 Forbidden Words That Trigger Female ObsessionDocumento22 pagine7 Forbidden Words That Trigger Female ObsessionTy Ler Durden82% (17)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Power of MantraDocumento15 paginePower of Mantraphani1978Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- A Separate Peace Teacher GuideDocumento44 pagineA Separate Peace Teacher GuideSwagat Sukumar Sahoo100% (3)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Asme B30Documento1 paginaAsme B30Nurul Huda100% (1)
- Method For Finding Stress in Cylinders With Radial NozzlesDocumento10 pagineMethod For Finding Stress in Cylinders With Radial NozzlesmatodelanusNessuna valutazione finora
- RE-HMRM2121 Remedial Exam ResultsDocumento4 pagineRE-HMRM2121 Remedial Exam ResultsAlmirah Makalunas0% (1)
- List of Competencies For HRDocumento18 pagineList of Competencies For HRTanu Arumugam50% (2)
- Portfolio IntroductionDocumento3 paginePortfolio Introductionapi-272102596Nessuna valutazione finora
- Cost & Management Accounting For MBA 13, Binder 2014Documento213 pagineCost & Management Accounting For MBA 13, Binder 2014SK Lashari100% (1)
- Detailed Lesson Plan in English: I. ObjectivesDocumento7 pagineDetailed Lesson Plan in English: I. ObjectivesnulllllNessuna valutazione finora
- Preboard English KeyDocumento16 paginePreboard English KeyGeraldine DensingNessuna valutazione finora
- 1 Singular&plural Nouns Lesson PlanDocumento3 pagine1 Singular&plural Nouns Lesson Planapi-279690289Nessuna valutazione finora
- Fayol's 14 Principles in Action at McDonald'sDocumento51 pagineFayol's 14 Principles in Action at McDonald'sVaibhav Gupta90% (10)
- Gafhsx 1Documento1 paginaGafhsx 1Nurul HudaNessuna valutazione finora
- DFHW112Documento1 paginaDFHW112Nurul HudaNessuna valutazione finora
- Prakt +kimia+organik+life+skillDocumento1 paginaPrakt +kimia+organik+life+skillNurul HudaNessuna valutazione finora
- DFH5342Documento1 paginaDFH5342Nurul HudaNessuna valutazione finora
- Elastic BeaconsDocumento9 pagineElastic BeaconsNurul HudaNessuna valutazione finora
- Autocrashsimulation InpDocumento2 pagineAutocrashsimulation InpNurul HudaNessuna valutazione finora
- SE ThreadsDocumento1 paginaSE ThreadsNurul HudaNessuna valutazione finora
- Analysis and Design of Marine Structures V Digital PDFDocumento4 pagineAnalysis and Design of Marine Structures V Digital PDFNurul Huda0% (1)
- 25 Abaqus ODBDocumento6 pagine25 Abaqus ODBNurul HudaNessuna valutazione finora
- Hex Bolt Unc Series 1 4x20x0 75 Ansi b18!2!1Documento1 paginaHex Bolt Unc Series 1 4x20x0 75 Ansi b18!2!1Nurul HudaNessuna valutazione finora
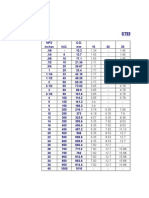
- Steel Pipes - Pipe Schedule ChartDocumento3 pagineSteel Pipes - Pipe Schedule ChartNurul HudaNessuna valutazione finora
- Designmodeler: Workshop 5.1 3D CurveDocumento8 pagineDesignmodeler: Workshop 5.1 3D CurveNurul HudaNessuna valutazione finora
- Eval Seismic ReqDocumento12 pagineEval Seismic ReqJoe LulekNessuna valutazione finora
- Generate Response Spectra in MSC NastranDocumento16 pagineGenerate Response Spectra in MSC NastranNurul HudaNessuna valutazione finora
- SfgawyDocumento1 paginaSfgawyNurul HudaNessuna valutazione finora
- Fatigue Analysis Tool 1.0Documento2 pagineFatigue Analysis Tool 1.0Nurul HudaNessuna valutazione finora
- PVEdwg 4225 0 0 PDFDocumento3 paginePVEdwg 4225 0 0 PDFSaša ĐorđevićNessuna valutazione finora
- Ty PVDocumento3 pagineTy PVNurul HudaNessuna valutazione finora
- Spring Analysis Tool3Documento4 pagineSpring Analysis Tool3Nurul HudaNessuna valutazione finora
- SfgawyDocumento1 paginaSfgawyNurul HudaNessuna valutazione finora
- VHNDDocumento1 paginaVHNDNurul HudaNessuna valutazione finora
- Ty PVDocumento1 paginaTy PVNurul HudaNessuna valutazione finora
- PSI 415 1 enDocumento2 paginePSI 415 1 enAstraopcNessuna valutazione finora
- UndDocumento1 paginaUndNurul HudaNessuna valutazione finora
- SsaDocumento1 paginaSsaNurul HudaNessuna valutazione finora
- SfdeaDocumento1 paginaSfdeaNurul HudaNessuna valutazione finora
- DSFDocumento1 paginaDSFNurul HudaNessuna valutazione finora
- StyDocumento1 paginaStyNurul HudaNessuna valutazione finora
- Jurnal BJRS Edisi 2 Tahun 2013 English VersionDocumento142 pagineJurnal BJRS Edisi 2 Tahun 2013 English VersionSuhar Diman100% (1)
- 10 Great Scientists of The World: AristotleDocumento29 pagine10 Great Scientists of The World: Aristotletonetcorbin1987Nessuna valutazione finora
- Lhuillier v. British Airways, G.R. No. 171092, (March 15, 2010), 629 PHIL 365-384Documento10 pagineLhuillier v. British Airways, G.R. No. 171092, (March 15, 2010), 629 PHIL 365-384Hershey Delos SantosNessuna valutazione finora
- EDET 780 Critique 2Documento3 pagineEDET 780 Critique 2Abigail MagaroNessuna valutazione finora
- The Rise of Descriptivism in LinguisticsDocumento16 pagineThe Rise of Descriptivism in LinguisticsBernardine Prima67% (3)
- Rationalism ScriptDocumento2 pagineRationalism Scriptbobbyforteza92Nessuna valutazione finora
- VARKDocumento3 pagineVARKDavid AriasNessuna valutazione finora
- Exhibits For The Analysis of Behavior A Program For Self-InstructionDocumento23 pagineExhibits For The Analysis of Behavior A Program For Self-InstructionGary KatzNessuna valutazione finora
- Ae 5Documento3 pagineAe 5api-410774615Nessuna valutazione finora
- Tips To Protect You From The Attacks of SatanDocumento4 pagineTips To Protect You From The Attacks of SatanislamicencyclopediaNessuna valutazione finora
- Sahasranamavali of Lord Vishnu - IIDocumento92 pagineSahasranamavali of Lord Vishnu - IIHetal PatelNessuna valutazione finora
- Humanities-Perception of Indian Consumers Towards-Vasanthi AjayDocumento26 pagineHumanities-Perception of Indian Consumers Towards-Vasanthi AjayImpact JournalsNessuna valutazione finora
- Third Age Guidance: Research Into Guidance Needs and MethodologiesDocumento11 pagineThird Age Guidance: Research Into Guidance Needs and MethodologiespamelaclaytonNessuna valutazione finora
- 75 Ways To Politely Interrupt A ConversationDocumento5 pagine75 Ways To Politely Interrupt A Conversationrevathy varatharajahNessuna valutazione finora
- My Transformational Journey Into A CoachDocumento7 pagineMy Transformational Journey Into A CoachRamanathan RamNessuna valutazione finora
- Ask and It Is Given PDFDocumento134 pagineAsk and It Is Given PDFhoangneanh256Nessuna valutazione finora
- Survey and Critical Review of Recent Innovative Energy Conversion TechnologiesDocumento6 pagineSurvey and Critical Review of Recent Innovative Energy Conversion TechnologiesRichardolsen1Nessuna valutazione finora
- Fantasy Sports ExhibitsDocumento23 pagineFantasy Sports ExhibitsAnonymous envpAfNessuna valutazione finora
- Secrets of SSBDocumento19 pagineSecrets of SSBAtomyt0% (1)