Potrebbero piacerti anche
- Phased Array Antenna Calibration Method in Operating Condition - Rev MethodDocumento2 paginePhased Array Antenna Calibration Method in Operating Condition - Rev MethodMatthew CarterNessuna valutazione finora
- Digital Phased Arrays ChallangesDocumento17 pagineDigital Phased Arrays ChallangesVivek KadamNessuna valutazione finora
- Solution Manual for 100 Genesys Design Examples: Second EditionDa EverandSolution Manual for 100 Genesys Design Examples: Second EditionNessuna valutazione finora
- Efficient Predistortion for Satellite DownlinksDocumento4 pagineEfficient Predistortion for Satellite DownlinksNguyen Anh DucNessuna valutazione finora
- Electrical Overstress (EOS): Devices, Circuits and SystemsDa EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNessuna valutazione finora
- Bias Circuit Design For Microwave AmplifiersDocumento7 pagineBias Circuit Design For Microwave AmplifiersPhilippeaNessuna valutazione finora
- Chapter 02 Basic Concepts in RF DesignDocumento110 pagineChapter 02 Basic Concepts in RF DesignBilal HabibNessuna valutazione finora
- I.seker - Calibration Methods For Phased Array RadarsDocumento16 pagineI.seker - Calibration Methods For Phased Array RadarsAlex YangNessuna valutazione finora
- Microwave Filters for Communication Systems: Fundamentals, Design, and ApplicationsDa EverandMicrowave Filters for Communication Systems: Fundamentals, Design, and ApplicationsNessuna valutazione finora
- QPSK Mod&Demodwith NoiseDocumento32 pagineQPSK Mod&Demodwith Noisemanaswini thogaruNessuna valutazione finora
- Mos CS LnaDocumento11 pagineMos CS LnaDajana DanilovicNessuna valutazione finora
- D-Band Frequency Tripler For Passive Imaging - Final 13th JulyDocumento4 pagineD-Band Frequency Tripler For Passive Imaging - Final 13th JulyTapas SarkarNessuna valutazione finora
- Broadband Array AntennaDocumento18 pagineBroadband Array Antennanomecognome123Nessuna valutazione finora
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryDa EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNessuna valutazione finora
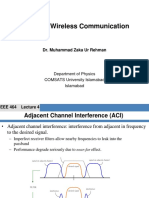
- Traffic Theory - Wireless Communication SystemsDocumento25 pagineTraffic Theory - Wireless Communication SystemsMuhammad Zaka Ur Rehman100% (1)
- A 4.596 GHZ, High Slew Rate, Ultra Low PowerDocumento6 pagineA 4.596 GHZ, High Slew Rate, Ultra Low PowerAlberto DanNessuna valutazione finora
- Experiment No.1 Rectangular Waveguide Design Using CST Microwave Studio SuiteDocumento3 pagineExperiment No.1 Rectangular Waveguide Design Using CST Microwave Studio Suiteali saleh100% (1)
- Low Power Optimization of Full Adder Circuit Based On Gdi Logic For Biomedical ApplicationsDocumento11 pagineLow Power Optimization of Full Adder Circuit Based On Gdi Logic For Biomedical ApplicationsIJAR JOURNALNessuna valutazione finora
- Effect of Slots in Ground Plane and Patch On MicroDocumento4 pagineEffect of Slots in Ground Plane and Patch On MicronikitaNessuna valutazione finora
- Optical Lecture 1 NUDocumento96 pagineOptical Lecture 1 NUPhon PhannaNessuna valutazione finora
- Accurate Design of Pyramidal Horn Antenna PDFDocumento2 pagineAccurate Design of Pyramidal Horn Antenna PDFవేలుసామి లింగాసామిNessuna valutazione finora
- Bulk Acoustic Wave ResonatorsDocumento4 pagineBulk Acoustic Wave Resonatorsscr1beNessuna valutazione finora
- Cascode CS LNA Design ExampleDocumento8 pagineCascode CS LNA Design ExampleAnonymous VG6Zat1oNessuna valutazione finora
- Recent Advances in Dielectric-Resonator Antenna TechnologyDocumento14 pagineRecent Advances in Dielectric-Resonator Antenna Technologymarceloassilva7992Nessuna valutazione finora
- LC Tank VCO Tutorial GuideDocumento51 pagineLC Tank VCO Tutorial Guiderenjith_004Nessuna valutazione finora
- Microwave Office Tutorial 1288Documento29 pagineMicrowave Office Tutorial 1288Sudipta MondalNessuna valutazione finora
- Antenna TheoryDocumento0 pagineAntenna TheoryElvin EndozoNessuna valutazione finora
- EC2403-RF and Microwave EngineeringDocumento12 pagineEC2403-RF and Microwave EngineeringbalajiapecNessuna valutazione finora
- GaN Based HEMT High Voltage PDFDocumento16 pagineGaN Based HEMT High Voltage PDFATman VaghamshiNessuna valutazione finora
- A Cavity Filter Using Stepped Impedance ResonatorDocumento4 pagineA Cavity Filter Using Stepped Impedance ResonatorDo SonNessuna valutazione finora
- ADS LNA Simulation ExampleDocumento27 pagineADS LNA Simulation ExampleChandra Praveen MahalingamNessuna valutazione finora
- Microelectronics: Circuit Analysis and DesignDocumento46 pagineMicroelectronics: Circuit Analysis and DesigndeivasigamaniNessuna valutazione finora
- Cascode MOS CircuitDocumento10 pagineCascode MOS CircuitAydin Mhysa AbetNessuna valutazione finora
- Assignment 3Documento1 paginaAssignment 3Phani SingamaneniNessuna valutazione finora
- Millimeter-Wave Tech ModesDocumento5 pagineMillimeter-Wave Tech Modesgiri ssNessuna valutazione finora
- Advanced Microwave Filter Synthesis TechniquesDocumento19 pagineAdvanced Microwave Filter Synthesis TechniquesMinh VuNessuna valutazione finora
- Design of Microwave LNADocumento86 pagineDesign of Microwave LNANguyễn Trần TuấnNessuna valutazione finora
- EC 8701 Microwave Design PrinciplesDocumento181 pagineEC 8701 Microwave Design PrinciplesVanitha RNessuna valutazione finora
- Qca Project PPTDocumento20 pagineQca Project PPTPandu KNessuna valutazione finora
- Power Electronics Experiments ECE-P-672Documento9 paginePower Electronics Experiments ECE-P-672Sai SomayajulaNessuna valutazione finora
- Cs 6304 Analog and Digital Communication 2 Marks and 16 Marks Questions and Answers 2 Marks Unit 1Documento6 pagineCs 6304 Analog and Digital Communication 2 Marks and 16 Marks Questions and Answers 2 Marks Unit 1Thiru DaaNessuna valutazione finora
- Signal Integrity in The Real WorldDocumento52 pagineSignal Integrity in The Real WorldpatarinwNessuna valutazione finora
- Tutorial-2 LNA PDFDocumento19 pagineTutorial-2 LNA PDFTeddy112100% (1)
- P-I-N Diode HandbookDocumento137 pagineP-I-N Diode HandbookChangjian LiNessuna valutazione finora
- Directional CouplerDocumento9 pagineDirectional Couplershwet_vNessuna valutazione finora
- EDICONChina2019 - (87) - Vye, David - Designing A Narrowband 28-GHz Bandpass Filter For 5G Applications PDFDocumento41 pagineEDICONChina2019 - (87) - Vye, David - Designing A Narrowband 28-GHz Bandpass Filter For 5G Applications PDFkhyatichavdaNessuna valutazione finora
- Valliammai Engineering College Question Bank on Advanced Radiation SystemsDocumento15 pagineValliammai Engineering College Question Bank on Advanced Radiation SystemsSaad0% (1)
- Phased Antenna Arrays and Application Wireless in Connectivity, BATCH 14Documento63 paginePhased Antenna Arrays and Application Wireless in Connectivity, BATCH 14nareshNessuna valutazione finora
- MATLAB Solution To Microwave Engineering Pozar 4th Ed. Example 1.5Documento5 pagineMATLAB Solution To Microwave Engineering Pozar 4th Ed. Example 1.5John Bofarull GuixNessuna valutazione finora
- Third Order InterceptsDocumento6 pagineThird Order InterceptsTeertha PriyankaNessuna valutazione finora
- Project 9 - Low Noise Amplifier Design in ADS (March 2014)Documento7 pagineProject 9 - Low Noise Amplifier Design in ADS (March 2014)Stephen J. WattNessuna valutazione finora
- Application Notes: Hybrid Coupler BasicsDocumento2 pagineApplication Notes: Hybrid Coupler BasicsAhmed S AlkhaldiNessuna valutazione finora
- Broadcasting and Cable TV SystemDocumento16 pagineBroadcasting and Cable TV SystemChilleMaeNessuna valutazione finora
- Collins 476J-1 Selective Wideband Voltmeter Manual - 520 5199 00 - March 1959Documento39 pagineCollins 476J-1 Selective Wideband Voltmeter Manual - 520 5199 00 - March 1959Bob Laughlin, KWØRLNessuna valutazione finora
- Hitachi Model V-422-V-222 Oscilloscope Operation ManualDocumento61 pagineHitachi Model V-422-V-222 Oscilloscope Operation ManualBob Laughlin, KWØRL100% (1)
- Sencore SC61 Operation, Application, and Maintenance ManualDocumento48 pagineSencore SC61 Operation, Application, and Maintenance ManualBob Laughlin, KWØRL75% (4)
- Collins Selective and Wideband Voltmeter 476J-1 Manual 523 0276 00, Revised 15 June 1961.Documento47 pagineCollins Selective and Wideband Voltmeter 476J-1 Manual 523 0276 00, Revised 15 June 1961.Bob Laughlin, KWØRLNessuna valutazione finora
- Agilent Technologies Advancements in Noise Measurement by Ken Wong, 08-2008.Documento57 pagineAgilent Technologies Advancements in Noise Measurement by Ken Wong, 08-2008.Bob Laughlin, KWØRLNessuna valutazione finora
- Anritsu ME434A-B-C Receiver Maintenance ManualDocumento245 pagineAnritsu ME434A-B-C Receiver Maintenance ManualBob Laughlin, KWØRLNessuna valutazione finora
- ITT Mackay Instruction Manual For Model 3030A-3030AR Synthesized Receiver Issue 3 June 1982Documento104 pagineITT Mackay Instruction Manual For Model 3030A-3030AR Synthesized Receiver Issue 3 June 1982Bob Laughlin, KWØRL100% (1)
- Collins 476J-1 Selective Wide Voltmeter Manual - 15 September 1959 Revised 10-15-1960 - 520 5199 00Documento46 pagineCollins 476J-1 Selective Wide Voltmeter Manual - 15 September 1959 Revised 10-15-1960 - 520 5199 00Bob Laughlin, KWØRLNessuna valutazione finora
- Collins 476J-1 Selective Wide Voltmeter 2 March 1959 59-14 520 5199 00 ManualDocumento43 pagineCollins 476J-1 Selective Wide Voltmeter 2 March 1959 59-14 520 5199 00 ManualBob Laughlin, KWØRLNessuna valutazione finora
- Upper Burrell Township - The First One Hundred Years 1879-1979 HistoryDocumento128 pagineUpper Burrell Township - The First One Hundred Years 1879-1979 HistoryBob Laughlin, KWØRL100% (3)
- Cushman Model CE-2 and CE-2B FM Communication MonitorsDocumento197 pagineCushman Model CE-2 and CE-2B FM Communication MonitorsBob Laughlin, KWØRL50% (2)
- The I F-77 Electromagnetic Wave Propagation Model (DOT-FAA-ES-833) by G. D. Gierhart and M. E. Johnson, 09-1983.Documento96 pagineThe I F-77 Electromagnetic Wave Propagation Model (DOT-FAA-ES-833) by G. D. Gierhart and M. E. Johnson, 09-1983.Bob Laughlin, KWØRLNessuna valutazione finora
- Sierra 303B Frequency Selective Levelmeter Operation Manual (SOM-303B), January 1974.Documento25 pagineSierra 303B Frequency Selective Levelmeter Operation Manual (SOM-303B), January 1974.Bob Laughlin, KWØRL100% (1)
- Harmon 4200A Selective Voltmeter Instruction Manual - April 1974Documento68 pagineHarmon 4200A Selective Voltmeter Instruction Manual - April 1974Bob Laughlin, KWØRL100% (1)
- Wavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Documento64 pagineWavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Bob Laughlin, KWØRLNessuna valutazione finora
- Studies in Ionospheric Propagation Part 1 and 2 by M. Katzin, B. Y.-C. Koo and M. Katzin, 03-1962.Documento78 pagineStudies in Ionospheric Propagation Part 1 and 2 by M. Katzin, B. Y.-C. Koo and M. Katzin, 03-1962.Bob Laughlin, KWØRLNessuna valutazione finora
- Antenna Performance Influenced by The Finite Extent and Conductivity of Ground Planes A Collection of Reprints by J. R. Wait, Et Al, 1990.Documento269 pagineAntenna Performance Influenced by The Finite Extent and Conductivity of Ground Planes A Collection of Reprints by J. R. Wait, Et Al, 1990.Bob Laughlin, KWØRL100% (1)
- Agilent Technologies & Hewlett-Packard Test Equipment ManualsDocumento2 pagineAgilent Technologies & Hewlett-Packard Test Equipment ManualsBob Laughlin, KWØRLNessuna valutazione finora
- TenTec Owner's Manual Omni-A and D Transceiver and Model 280 Power Supply, 1980.Documento91 pagineTenTec Owner's Manual Omni-A and D Transceiver and Model 280 Power Supply, 1980.Bob Laughlin, KWØRL100% (2)
- Low Noise Measurements in An RF Environment by Daniel E. Warren, Rome Laboratory, 08-1993.Documento19 pagineLow Noise Measurements in An RF Environment by Daniel E. Warren, Rome Laboratory, 08-1993.Bob Laughlin, KWØRLNessuna valutazione finora
- Rycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Documento67 pagineRycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Bob Laughlin, KWØRLNessuna valutazione finora
- Agilent Copyright License To Copy and Distribute Manuals For Products Discontinued or No Longer Supported Bob Laughlin, 08-2011.Documento2 pagineAgilent Copyright License To Copy and Distribute Manuals For Products Discontinued or No Longer Supported Bob Laughlin, 08-2011.Bob Laughlin, KWØRLNessuna valutazione finora
- A Digital Radio Receiver For Ionospheric Research by H. Gordon James (Communications Research Centre Canada), 06-2006.Documento43 pagineA Digital Radio Receiver For Ionospheric Research by H. Gordon James (Communications Research Centre Canada), 06-2006.Bob Laughlin, KWØRLNessuna valutazione finora
- Grounded Medium Frequency Monopole by Valentino Trainotti, Walter G. Fano, and Lazaro Jastreblansky (University of Buenos Aires, Argentina), 2005.Documento29 pagineGrounded Medium Frequency Monopole by Valentino Trainotti, Walter G. Fano, and Lazaro Jastreblansky (University of Buenos Aires, Argentina), 2005.Bob Laughlin, KWØRLNessuna valutazione finora
- Agilent Application 1354 Practical Noise-Figure Measurement and Analysis For Low-Noise Amplifier Designs (1354 5980-1916E), 2000.Documento20 pagineAgilent Application 1354 Practical Noise-Figure Measurement and Analysis For Low-Noise Amplifier Designs (1354 5980-1916E), 2000.Bob Laughlin, KWØRLNessuna valutazione finora
- Agilent Technologies Adaptive Feedforward Linearization For RF Power Amplifiers Part 1 (5989-9100EN) by Shawn P. Stapleton Simon Fraser UniversityDocumento19 pagineAgilent Technologies Adaptive Feedforward Linearization For RF Power Amplifiers Part 1 (5989-9100EN) by Shawn P. Stapleton Simon Fraser UniversityBob Laughlin, KWØRLNessuna valutazione finora
- Rycom Model 6040 Selective Level Meter Instruction Manual (030 00030 01), Third Edition, April 1992.Documento12 pagineRycom Model 6040 Selective Level Meter Instruction Manual (030 00030 01), Third Edition, April 1992.Bob Laughlin, KWØRLNessuna valutazione finora
- Rycom Model 2172 Frequency Selective Voltmeter Maintenance-Manual W0585-6FD, 1967.Documento27 pagineRycom Model 2172 Frequency Selective Voltmeter Maintenance-Manual W0585-6FD, 1967.Bob Laughlin, KWØRLNessuna valutazione finora
- Rycom Model 2174 Frequency Selective Voltmeter Maintenance Manual, 1968.Documento21 pagineRycom Model 2174 Frequency Selective Voltmeter Maintenance Manual, 1968.Bob Laughlin, KWØRLNessuna valutazione finora
- Fuse and Types of Fuses - Electrical Technology-OkDocumento7 pagineFuse and Types of Fuses - Electrical Technology-Okdrastir_777100% (1)
- Power 160 Brushless Outrunner Motor, 245Kv (EFLM4160A) - E-Flite - Advancing Electric FlightDocumento2 paginePower 160 Brushless Outrunner Motor, 245Kv (EFLM4160A) - E-Flite - Advancing Electric FlightpoeminimoNessuna valutazione finora
- Research PAPER VLSIDocumento13 pagineResearch PAPER VLSIRam MNessuna valutazione finora
- C 102Documento1 paginaC 102Nicky DragutescuNessuna valutazione finora
- P3 End-Of-Unit Test (Higher) Mark SchemeDocumento4 pagineP3 End-Of-Unit Test (Higher) Mark SchemePaul LloydNessuna valutazione finora
- Mwe Mid 2Documento2 pagineMwe Mid 2Veerayya JavvajiNessuna valutazione finora
- Minimum Clearance in SubstationDocumento6 pagineMinimum Clearance in SubstationNaveen Boppana67% (3)
- Westermo Ug 6617-2203 mdw-45 RevfDocumento16 pagineWestermo Ug 6617-2203 mdw-45 RevfCarlos CetinaNessuna valutazione finora
- IGCSE Physics Revison Question BankDocumento43 pagineIGCSE Physics Revison Question BankSyed Waqas Ahmed100% (4)
- Kit 17. LM386 Low Voltage Audio Amplifier: Circuit DescriptionDocumento2 pagineKit 17. LM386 Low Voltage Audio Amplifier: Circuit Descriptionszolid79Nessuna valutazione finora
- LA-IMD Series Linear ActuatorsDocumento2 pagineLA-IMD Series Linear ActuatorsRobNessuna valutazione finora
- Manual Usuario EspañolDocumento144 pagineManual Usuario EspañolNarda TiconaNessuna valutazione finora
- Distribution Standard: Reference REV Title: Distribution Standard Date: OF Revision DateDocumento56 pagineDistribution Standard: Reference REV Title: Distribution Standard Date: OF Revision DateWarren MorseNessuna valutazione finora
- 5-Lecture 05 Electromechanical Systems Transfer FunctionsDocumento13 pagine5-Lecture 05 Electromechanical Systems Transfer FunctionsHamza Khan100% (1)
- Danfoss VLT HVAC Design GuideDocumento200 pagineDanfoss VLT HVAC Design Guidepaplus100% (1)
- SUN2000-450W-P2 600W-P DatasheetDocumento1 paginaSUN2000-450W-P2 600W-P DatasheeteynestyneNessuna valutazione finora
- Lecture Nonlinear and Anisotropic MaterialsDocumento25 pagineLecture Nonlinear and Anisotropic MaterialsJabir Khan JadoonNessuna valutazione finora
- Eacon Inv Ec500Documento74 pagineEacon Inv Ec500michalis zisisNessuna valutazione finora
- Kraus & Naimer C Switches PDFDocumento56 pagineKraus & Naimer C Switches PDFJefMur100% (1)
- Communications Systems - CCS CU Control UnitDocumento3 pagineCommunications Systems - CCS CU Control UnitPrună Dumitru AdrianNessuna valutazione finora
- Christie RF80 K Specification SheetDocumento6 pagineChristie RF80 K Specification SheetJuan MartinezNessuna valutazione finora
- Sample Electrical Installation CertificateDocumento6 pagineSample Electrical Installation CertificateDilanka Rathnayake100% (1)
- Ao3401 PDFDocumento5 pagineAo3401 PDFWalter FabianNessuna valutazione finora
- Datasheet TLC2652, TLC2652A, TLC2652YDocumento31 pagineDatasheet TLC2652, TLC2652A, TLC2652YJose GodoyNessuna valutazione finora
- Recent Advances in Power Electronics, Power and Control Systems Engineering (RAPEPCSE-2016)Documento2 pagineRecent Advances in Power Electronics, Power and Control Systems Engineering (RAPEPCSE-2016)prembiharisaranNessuna valutazione finora
- Design of 220kV Transmission Line Tower Using STAAD.ProDocumento27 pagineDesign of 220kV Transmission Line Tower Using STAAD.ProIlham HusseinNessuna valutazione finora
- Dr. Ahmed Said's Introduction to Electronics Chapter on Atoms, SemiconductorsDocumento28 pagineDr. Ahmed Said's Introduction to Electronics Chapter on Atoms, Semiconductorsmustafa osmanNessuna valutazione finora
- Interface Converter Traxbus To Eia-Rs232 / Eia-Rs422 / Eia-Rs485Documento8 pagineInterface Converter Traxbus To Eia-Rs232 / Eia-Rs422 / Eia-Rs485guillaumeNessuna valutazione finora
- Manual Temporizador TH3M PDFDocumento10 pagineManual Temporizador TH3M PDFMauricio Barraza FigueroaNessuna valutazione finora
- Signal Condititioning DevicesDocumento17 pagineSignal Condititioning DevicesAnish LotraNessuna valutazione finora
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDa EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNessuna valutazione finora
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationDa EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNessuna valutazione finora
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4.5 su 5 stelle4.5/5 (542)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDa EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNessuna valutazione finora
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4 su 5 stelle4/5 (331)
- CEH Certified Ethical Hacker Practice Exams, Third EditionDa EverandCEH Certified Ethical Hacker Practice Exams, Third EditionNessuna valutazione finora
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Da EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Valutazione: 4 su 5 stelle4/5 (4)
- CCNA Certification Study Guide, Volume 2: Exam 200-301Da EverandCCNA Certification Study Guide, Volume 2: Exam 200-301Nessuna valutazione finora
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDa EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsValutazione: 4 su 5 stelle4/5 (1)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamDa EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNessuna valutazione finora
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityDa EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityValutazione: 4.5 su 5 stelle4.5/5 (13)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDa EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxValutazione: 4.5 su 5 stelle4.5/5 (67)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDa EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionValutazione: 5 su 5 stelle5/5 (4)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDa EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamValutazione: 5 su 5 stelle5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionDa Everand8051 Microcontroller: An Applications Based IntroductionValutazione: 5 su 5 stelle5/5 (6)
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeDa EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeValutazione: 5 su 5 stelle5/5 (1)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireDa EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNessuna valutazione finora
- Understanding Automotive Electronics: An Engineering PerspectiveDa EverandUnderstanding Automotive Electronics: An Engineering PerspectiveValutazione: 3.5 su 5 stelle3.5/5 (16)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDa EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsValutazione: 5 su 5 stelle5/5 (2)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Da EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Nessuna valutazione finora
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDa EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingValutazione: 4 su 5 stelle4/5 (1)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowDa EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNessuna valutazione finora
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Da EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Valutazione: 5 su 5 stelle5/5 (1)