Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Simocode DP
Caricato da
Luis Andres Pradenas FuentesCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Simocode DP
Caricato da
Luis Andres Pradenas FuentesCopyright:
Formati disponibili
Introduccin y Notas sobre el Manual Propsito del manual Este manual est destinado a ser utilizado como libro
de consulta. La informacin en el manual que permite operar SIMOCODE-DP. Temas cubiertos El manual consta de los captulos proporcionan instrucciones para su uso y referencia captulos. Los temas que cubre incluyen los siguientes: Filosofa y visin general del sistema SIMOCODE-DP Parametrizacin Sistema componentes Descripcin del software de parametrizacin y diagnstico Win-SIMOCODE-DP El manejo de errores, el diagnstico La comunicacin, transmisin de datos Estructura de datos Los datos tcnicos y las secciones transversales del conductor Ejemplo de configuracin Un ejemplo de configuracin completa se incluye en el manual. En este ejemplo se explica a usted, paso a paso, cmo configurar un arranque directo con SIMOCODE-DP. Las tablas en el Apndice A encontrar tablas y diagramas de circuitos en parte por predibujadas el propsito de diagnstico, etc configuracin,. Si ya est familiarizado con cmo operar el SIMOCODE-DP, las tablas son suficientes para trabajar con el sistema. Usted puede entrar en la configuracin de los parmetros seleccionados en las tablas con el fin de facilitar la parametrizacin posterior. Al mismo tiempo, esto tambin le da un registro de cmo se ha parametrizado el sistema. Circuitos tpicos en el Apndice E se encuentra un resumen de los circuitos tpicos que se pueden utilizar para las funciones de control individuales. Otros manuales del sistema Si est trabajando con IM308C y PROFIBUS COM, necesita adicionalmente el manual del sistema "Sistema Descentralizado de perifricos ET 200" Si est trabajando con STEP 7, necesita adicionalmente el manual del sistema "Software de sistema para S7 300/400 y Sistema Manual de Funciones estndar y funciones"
Una descripcin del sistema 1. La filosofa detrs del sistema SIMOCODE-DP 3UF5 Informacin general 1 a 7 Componentes de la SIMOCODE-DP configuraciones del sistema Resumen de las funciones Diseo estructural del sistema SIMOCODE-DP La filosofa detrs del sistema SIMOCODE-DP 3UF5:
Proteccin de Control: SIMOCODE-DP 3UF5 (Siemens proteccin del motor y Periferia descentralizada) es un dispositivo de proteccin del motor y de control con una interfaz PROFIBUS-DP. El microprocesador es el elemento central del sistema. Todas las funciones de proteccin del motor y de control se implementan con el microprocesador, as como funciones de enclavamiento, el clculo de la operacin, el diagnstico y los datos estadsticos y de alto rendimiento de comunicacin (PROFIBUS-DP) entre el nivel de automatizacin y la rama de motor. Actual como el valor central de referencia: Los transformadores de corriente integrado servir el propsito de detectar la ms importante de la corriente medida variable, elctrico. Ya sea para proteccin de sobrecarga, advertencia de sobrecarga, los umbrales actuales, la activacin / desactivacin de seal de entrada de espalda, el clculo del nmero de horas de funcionamiento, etc, SIMOCODE-DP siempre toma la corriente elctrica como el valor de referencia central. La estructura del sistema se muestra de forma muy simplificada en la figura. 1:
Layout Convencional
Qu distingue al sistema SIMOCODE-DP de motor convencional equipos de proteccin y control? SIMOCODE-DP 3UF5 simplifica en gran medida el poder del motor. esto se convierte aparente tras el examen de la figura. 2 "Diseo de una rama del motor (arranque directo) utilizando la tecnologa convencional "y la figura. 3" orientada al futuro esquema de conexiones con SIMOCODE-DP ". Diseo con SIMOCODE-DP El sistema SIMOCODE-DP solo se utiliza para todas las funciones de vigilancia y de control, hasta e incluyendo el preprocesamiento de la seal. De esta manera no hay necesidad de rels de sobrecarga adicionales, dispositivos de evaluacin de termistor, transformadores de corriente, de analgico a digital de convertidores etc. El cableado del circuito de control se dispensa con enteramente. El inicio y la parada de interruptores se conectan directamente a las entradas de la Unidad Bsica 3UF50. La bobina del contactor se controla a travs de la salida de la unidad bsica 3UF50 - un contacto auxiliar para enganche es innecesaria. El "Motor On / Off" Check-Back de la seal, que en el pasado fue enviado a travs de un contacto auxiliar del contactor, se implementa utilizando la corriente con SIMOCODE-DP. Esto significa que cuando se aplica una orden ON y actual est fluyendo, SIMOCODE-DP devuelve el cheque de devolucin de la seal "Motor On", o en el caso de una orden de apertura y cuando la corriente no fluye, SIMOCODE-DP devuelve el cheque de devolucin de la seal "Motor Off".
La siguiente figura muestra un esquema con SIMOCODE-DP
Transmisin de datos PROFIBUS-DP La seal de arranque / parada se transmite desde el sistema de automatizacin (PLC) a travs de PROFIBUS-DP, as como las seales de vuelta de entrada para encendido, apagado, la sobrecarga de culpa, termistor fallo, la corriente, etc Todo el cableado paralelo entre el sistema de automatizacin y la rama de motor se omite. En el ejemplo utilizado aqu, esto equivale a 23 puntos de sujecin y machos 10. Debido a un mximo de 122 esclavos (SIMOCODE-DP) se pueden conectar a la red PROFIBUS-DP cuando el sistema est completamente expandido, los dos cables PROFIBUS-DP cable sustituye a 2806 puntos de sujecin y ncleos 1220, y por lo tanto tambin la E / S de los mdulos necesarios en el sistema de automatizacin (PLC). La reduccin de la cantidad de cableado: Como resultado de la enorme reduccin de la cantidad de cableado y los puntos de sujecin, tambin hay un menor nmero de fuentes potenciales de fallos.
La omisin de los componentes suplementarios Si los dispositivos de acoplamiento y placas terminales se utilizan adems, estos tambin pueden ser omitidos. Los detalles de cmo convertir un diagrama de circuito convencional en un esquema orientado hacia el futuro y qu parmetros deben ajustarse estn explicados en el captulo de "Configuracin". Lgica de los mdulos del sistema SIMOCODE-DP, adems, hace varios mdulos lgicos disponibles, tales como tablas de verdad, temporizadores, contadores y los mdulos de seal de adaptacin. Esta apertura permite traducir sus propios requisitos especficos de la instalacin a la prctica con SIMOCODE-DP. Fast modificacin por software: El uso de los mdulos lgicos Puede cambiar rpidamente la funcionalidad a travs del software durante la puesta en marcha o durante el funcionamiento. No hay necesidad de cableado complejo.
La omisin de los componentes suplementarios Si los dispositivos de acoplamiento y placas terminales se utilizan adems, estos tambin pueden ser omitidos. Los detalles de cmo convertir un diagrama de circuito convencional en un esquema orientado hacia el futuro y qu parmetros deben ajustarse estn explicados en el captulo de "Configuracin". Lgica de los mdulos del sistema SIMOCODE-DP, adems, hace varios mdulos lgicos disponibles, tales como tablas de verdad, temporizadores, contadores y los mdulos de seal de adaptacin. Esta apertura permite traducir sus propios requisitos especficos de la instalacin a la prctica con SIMOCODE-DP. Fast modificacin por software: El uso de los mdulos lgicos Puede cambiar rpidamente la funcionalidad a travs del software durante la puesta en marcha o durante el funcionamiento. No hay necesidad de cableado complejo. Funcionamiento autnomo: Como toda la proteccin del motor y funciones de control se procesan de acuerdo a un principio descentralizada en el sistema SIMOCODE-DP 3UF5, la rama de motor puede seguir siendo controlado incluso en el caso de fallo del sistema de automatizacin (PLC) o de perturbaciones en el trayecto de comunicacin. De esto se deduce tambin que SIMOCODE-DP puede funcionar sin conexin a la red PROFIBUS-DP. El PROFIBUSDP entonces puede adaptar segn sea necesario.
El procesador de comunicaciones (CP / IM) conectado en el controlador programable se encarga de la gestin de los dispositivos de SIMOCODE-DP conectados a PROFIBUS-DP y acta como interfaz con el programa de aplicacin.
El tratamiento posterior de los datos SIMOCODE-DP, es decir, la integracin en el sistema de control transversal planta y preparacin posterior de los datos, se lleva a cabo por el programa de aplicacin. Paralelamente a esto, todas las unidades de SIMOCODE-DP se puede parametrizar, controlar y monitorizar a travs de PROFIBUS-DP de un segundo "estacin central". Para obtener informacin detallada, consulte el captulo titulado "Transmisin y Comunicacin de Datos". En las siguientes pginas usted puede familiarizarse con el alcance de las funciones y los componentes disponibles. Estadsticas de explotacin y datos de diagnstico Los SIMOCODE-DP fuentes de datos, tales como Motor de encendido / apagado / Izquierda / Lento / Cerrar etc Fallo: sobrecarga / termistor / etc Advertencia: Sobrecarga / Umbral de corriente superior, etc superado Corriente de funcionamiento Horas de funcionamiento Nmero de ciclos de conmutacin Nmero de disparos por sobrecarga Intensidad de disparo por sobrecarga pasado Los componentes del sistema SIMOCODE-DP Sistema modular SIMOCODE-DP es un sistema modular, los componentes bsicos del sistema comprende una unidad 3UF50 bsica, el mdulo de expansin 3UF51, el Grupo 3UF52 operador, cables de conexin y el Win-SIMOCODE-DP 3UF57 software estndar para la parametrizacin y el diagnstico.
Win-SIMOCODE-DP 3UF57 Software para la parametrizacin, control, diagnstico y pruebas de SIMOCODE-DP, conectados a travs de PROFIBUS-DP o mediante la interfaz RS232 SIMOCODE-DP. Se ejecuta en Windows 95 o Windows NT, conmutables entre el alemn y el Ingls.
OM-SIMOCODE-DP Paso 7 O bjectM anager para llamar Win-SIMOCODE-DP/Professional en SIMATIC S7/STEP 7, versin 4.0 o superior. Conexin de cables / conectores Conexin entre la Unidad Bsica, Mdulo de Expansin y / o OperadorPanel. Conexin de bus bloque / terminal de bus mdulo Si el PROFIBUS-DP se conecta a la de 9 polos Sub-D hembra de la base Unidad, estandarizados 9-polos Sub-D tapones se pueden utilizar. De lo contrario existe un Tclamp disponible para la conexin a los terminales A y B. El mdulo de terminacin de bus con fuente de alimentacin integrada garantiza que el trfico de datos se realiza correctamente, incluso cuando el ltimo esclavo se retira de la lnea de bus (vase la pgina 1-13).
Deteccin de corriente con transformadores de corriente externos La Unidad Bsica 3UF5001 con transformadores de tipo barra puede ser operado con transformadores de corriente externa. Los circuitos secundarios del transformador de corriente primero se envan a travs de los tres push-a travs de las aberturas de la base Unidad y cortocircuito. Corriente secundaria del transformador externo 5 A: basta con pulsar una vez a travs de cada abertura push-a travs de 1 A: plomo bucle a travs de cinco veces (n = 5, es decir, 5 x 1 A = 5 A). La corriente secundaria del transformador de corriente externo es la act-primaria alquiler de la Unidad de SIMOCODE-DP Basic. Para esta corriente de mx. 5 A usted requieren una Unidad Bsica 3UF5001 con un rango de ajuste 1,25 a 6,3 A.
Ejemplo Transformador de corriente: 3UF1868-3GA00 (ver Seccin del catlogo NSK 1), corriente primaria 205 A para 820 A, la corriente secundaria 1 A. Unidad bsica: 3UF5001 con la gama ms baja 1,25 A a 6,3 A. La seal principal debe ser amplificada por un bucle de los conductores. Si se enlazan cinco veces, se obtiene 5 x 1 A = 5 A. La corriente principal de la unidad bsica es de 5 A. Esto significa que: 5 A Corriente conjunto es corresponde a 820 A de corriente del motor, el valor conjunto superior a 820 A es de 5 A en el SIMOCODE-DP La relacin de transformacin de motor en Definir cual es, es por lo tanto 820 A / 5 A = 164 El valor de ajuste inferior a 205 A es entonces (5 A x 205 A) / 820 A = 1,25 A. La corriente de muestra fluye en cualquier momento uno no necesita ser convertido porque SIMOCODE-DP slo enva el valor de porcentaje.
La Unidad Bsica 3UF50
Descripcin de las funciones El SIMOCODE-DP protege los motores y las ramas de carga contra sobrecarga, fallo de fase y asimetra de corriente por medio de almacenado de tiempo actual funciones (caracterstica de disparo) en el intervalo de 0,25 A a 820 A. En el caso de una sobrecarga, el SIMOCODE-DP reacciona bien apagando los controles o contactores con una seal, dependiendo de la configuracin que ha introducido. Deteccin actual de la unidad bsica detecta la corriente de las tres fases con la ayuda del transformador de corriente integrado. La unidad bsica detecta asimetras por encima de aproximadamente 40% y la fase fracasos. ms baja de corriente lmite de deteccin El lmite inferior de deteccin de corriente es 20% del valor de ajuste mnimo.
Ejemplo: Unidad Bsica 3UF5001-3 ... 0-1 Rango de ajuste de 1,25 A a 6,3 A El valor mnimo fijado 1,25: mnimo detectable corriente: 0,25 A (20%) Eficiencia de la Deteccin de corriente: La precisin de la deteccin actual es del 5% dentro del rango de ajuste. 2,6 Poder de control 2.6.1 Control y bloqueo de proteccin del motor Descripcin de las funciones Con el fin de ofrecer una proteccin fiable de la rama motora, debe asignar los comandos de control para el control y el bloque de proteccin del motor. Nota En caso contrario seales de habilitacin del operador, funciones de control y funciones de protecciones no tienen ningn efecto. Diagrama El principio se ilustra en el siguiente diagrama:
2.6.2 Informacin bloque de datos Descripcin de las funciones El bloque de datos de la informacin hace que los datos importantes de operacin y las seales disponibles, tales como encendido, apagado, Izquierda, Derecha advertencias, lento, rpido, cerrar, abrir,, fallas, etc (ver tambin la tabla de asignacin, Apndice A.1). Puede conectar estas seales a las salidas del sistema, los transmiten a travs de PROFIBUS-DP o mostrarlos en el panel del operador. Diagrama El principio se muestra en el siguiente diagrama:
2.6.3 Descripcin de las Estaciones de Control Las estaciones de control son puntos donde los comandos de conmutacin (por ejemplo Motor Encendido o Apagado del motor) se emiten. Estaciones de control posibles incluyen: 1. Estacin de control local, que se encuentra en la proximidad inmediata del motor y es operado a travs de pulsadores, por ejemplo. 2. PROFIBUS-DP, el cambio de los comandos del sistema de automatizacin (PLC). 3. HMI, como una opcin adicional para el control a travs de un manejo y visualizacin estacin (interfaz hombre-mquina) o va PROFIBUS-DPV1 con la Software Win-SIMOCODE-DP/Professional. 4. 3UF52 panel del operador, que se monta en la puerta del armario de conmutacin.
El sistema SIMOCODE-DP proporciona estas estaciones de control interno. Las Estaciones de control cada uno tiene tres entradas internas: On1, On2, Off. Nota La entrada interna LOC-Off se invierte y por lo tanto, 0 es activo. Como resultado, el contactor Controles QE1/QE2/QE3 se desactiva en caso de rotura de hilo en el cable de alimentacin al botn de parada externa, por ejemplo, y slo se puede activar cuando el fallo ha sido corregido.
Las opciones para la asignacin de las entradas internas de las estaciones de control incluyen, por ejemplo: La estacin externa de control local (arranque y parada botones, los cuales estn conectados a las entradas de la Unidad de 3UF50 Basic) los botones del panel del operador PROFIBUS-DP bits de control PROFIBUS-DPV1 los bits de control
Activacin Activacin de seales se estn cambiando las autorizaciones de estaciones de control diferentes. La tabla muestra las estaciones de control de cuatro posibles que puede activar el modo de operar del modo de control interruptores S1 y S2.
En la prctica, normalmente slo una funcin de conmutacin se utiliza, por ejemplo, en Para cambiar con la autorizacin de conmutacin entre el control local Estacin y el sistema de automatizacin (PLC) con un interruptor de llave o mando de un sistema de automatizacin. Ejemplo 1: Local - Automtico. Usted desea utilizar un bit de control PROFIBUS-DP cambiar entre el control local de la estacin / modo de operacin 2 (local) y con- control a travs de PROFIBUS-DP/operating modo 4 (modo automtico). Para ello, PROFIBUS-DP bit de control de 0,5 a S1 y S2 deben ser asignados a el "valor de nivel fijo 1". Si desea cambiar con un interruptor de llave, debe conectar el contacto del interruptor de llave a un terminal de entrada de la unidad bsica y asignar al terminal de entrada de control del conmutador de modo S1. En instalaciones complejas, puede ser necesario tener dos cambio funciones, S1 y S2, por ejemplo con el fin de cambiar la autorizacin de conmutacin desde lugares diferentes con dos interruptores de llave. Ejemplo 2: Local - Remoto - automtico que desee utilizar un bit de control PROFIBUS-DP para cambiar entre el control local de la estacin / modo de operacin 2 (local) y control a travs de PROFIBUS-DP / modo de funcionamiento 4 (automtico) y adems desea para permitir que el panel del operador 3UF52 en el tablero de cabina / modo de operacin 2 (a distancia) con autorizacin igualdad junto con la estacin de control local. Para ello, PROFIBUS-DP bit de control de 0,5 a S1 y S2 deben ser asignados a el "valor de nivel fijo 1". Si desea cambiar con un interruptor de llave, es necesario conectar el contacto del interruptor de llave a un terminal de entrada de la unidad bsica y asignar el terminal de entrada de S1 software de control de interruptor de modo. Adems se debe establecer "libre" para los comandos de encendido y apagado en el modo de operacin 2, "Conmutacin de cubculo" de la columna.
Configuracin de COM-PROFIBUS / Paso 7 Si establece y asignar los parmetros a travs de COM-PROFIBUS o STEP 7, debera determinar el Operador Habilitacin seales de la tabla siguiente:
2.6.4 Descripcin de las funciones de control Las funciones de control del sistema SIMOCODE-DP implementar todos intercerraduras, operaciones lgicas y retrasos. Si las entradas auxiliares de control son necesarios, como para el control de actuador / posicionador para ejemplo bloques o funciones necesitan ser utilizados, stos tienen una influencia (como descrito) sobre la funcin de control. Funcionamiento normal Durante el funcionamiento normal, sin funcionamiento paso a paso de ser activado, la orden de conmutacin a la respectiva entrada de la estacin de "ON1/ON2" Control se almacena y slo puede ser cancelada por una orden de conmutacin a la respectiva entrada de la estacin de "OFF" Control. Esto significa que el contacto auxiliar para bloquear el contactor no es necesario cuando se utiliza SIMOCODE-DP. Funcionamiento paso a paso El "modo de marcha lenta" funcin acta sobre las aportaciones de todos "ON1" y "On2" Estaciones de Control. Si el modo de avance lento se activa un comando de conmutacin slo tiene un ejecutivas, siempre un "alto" de seal. Ejemplos En los circuitos tpicos seccin encontrar un ejemplo para cada funcin de control en la forma de un diagrama de circuito, el diagrama de bloques y la lista de parmetros. Comentarios generales sobre el arranque directo, arranque estrella-tringulo de marcha atrs, Starter, Starter Dahlander, Pole Cambio Starter Starter y suave Cierre Dependiendo de la funcin de control se utiliza, despus de un comando "On" para el "ON1/ON2" Estacin de Control del Contactor respectivos controles QE1/QE2/QE3 se activan:
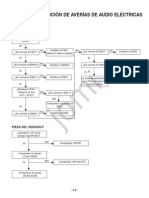
Diagnstico de fallos Fallo Manipulacin Advertencia 5,1 Comportamiento en caso de un fallo Descripcin de las funciones Mostrando mensajes de error El SIMOCODE-DP indica fallos y averas en la instalacin como sigue: En la unidad bsica y en el panel del operador, el "fallo general" se enciende. En caso de fallos del bus, el "Bus" LED tambin se apaga. Si est usando Win-SIMOCODE-DP, el mensaje de error correspondiente aparece en texto sin formato. En el PROFIBUS-DP, el bit correspondiente se pone en el mensaje cclico y / o canal de diagnstico. Reacciones adicionales. Las siguientes reacciones tambin se activan: Los controles QE contactores se desactivan. El control de la lmpara QLS se activa. El "Error General" est establecido. Puede asignar el "Fallo general" poco y / o el control de la lmpara QLS a un rel de salida, por ejemplo, para encender una luz indicadora de falla.
Anlisis de fallos rpida con Win-SIMOCODE-DP Para llevar a cabo el anlisis de fallos de forma rpida, en caso de una falla durante la puesta en marcha o funcionamiento se recomienda llamar el "Control / seal de" mscara con el software Win-SIMOCODE-DP. 5.2 Reconocimiento y manejo de errores Fallo mesa manejo Los siguientes cuatro pginas contienen una tabla de medidas que deben adoptarse en el tratamiento de fallos. La tabla se aplica en los casos en que el motor se encienda antes de la falla ocurrido. La tabla contiene la siguiente informacin: Qu falla ha ocurrido y cul es su significado. Cul es el comportamiento de los controles QE1/QE2/QE3 contactor y el QLS / QLE1/QLE2/QLA Lmpara controles. Qu mensaje de estado, advertencia y mensaje de fallo se emite. Medidas para hacer frente a la culpa. En la tabla tambin se incluye en el Apndice A. Leyenda de los smbolos utilizados y notas al pie: El LED se ilumina o seal continua en el caso de la lmpara de control QLS/QLE1/QLE2/QLA LED parpadea o la seal intermitente en el caso de la QLS/QLE1/QLE2/QLA Indicador de Control de LED apagado o no hay seal en el caso de la QLS/QLE1/QLE2/QLA Indicador de Control de Control del Contactor QE1/QE2/QE3 desactivado Control del Contactor QE1/QE2/QE3 conserva su estado 1) el comportamiento parametrizado en el caso de un "Shutdown" culpa 2 comportamiento parametrizado en el caso de un "Aviso" Fallo 3) parametrizada comportamiento en el caso de "Off" culpa 4) el comportamiento parametrizado en el caso de "mantener el estatus de" culpa 5) Se aplica a mover del posicionador y culpa - seal indica como se especifica con el posicionador en la posicin final y el fallo, no hay seal de QLA y QLE1 continua o seal QLE2 de acuerdo con la posicin final 7) En el caso del posicionador y el control de la vlvula solenoide, seal continua
8) Intermitente seal slo QLE1 hasta la posicin final CERRADO alcanzada, seal continua 9) En el caso de Posicionador slo posible restablecer 10) En el caso de la seal Posicionador slo continua a QLE1 o QLE2 11) En el caso de seales intermitentes para Posicionador QLE1 o QLE2 12) En el caso de la vlvula de solenoide QLE2 luz fija y QLA no hay seal 13) Cuando se utiliza la funcin de control de sobrecarga QLA/QLE1/QLE2 los controles de las luces no estn activas. ERROR DE PARAMETRIZACION ERROR 0: Discrepancia en Conjunto actual Is1 / Is2, dispositivo incorrecto ver-sin para el conjunto actual. Ejemplo: Unidad Bsica 1,25 ... 6,3 A, 3UF5001 conjunto de valores y 20A. ERROR 1: Versin incorrecta para el dispositivo de proteccin del motor externo de falla a tierra / Termistor. ERROR 2: Discrepancia en la configuracin del detector de termistor: valor para umbral de disparo y ajuste del umbral de advertencia y no Binario sensor PTC o seleccionado. ERROR 3: Discrepancia entre la funcin Definir actual y Control: Is1 y Is2 set y funciones de control de sobrecarga, arranque directo, arrancador inversor, Star Delta Starter, puerta / Posi-cionador, vlvula solenoide seleccionado o Is2 slo Is1 o solo polo y control de funciones y Cahnging Starter Starter set Dahlander. ERROR 4: misiones al panel de operador con parmetros aunque tal mdulo est conectado ERROR 5: Asignaciones a mdulo de expansin de parmetros alt-unque tal mdulo est conectado. ERROR 6: comportamiento biestable no disponible; Unidad Bsica 3UF50 .. -3 .. 0 0-1 usado ERROR 7: Error de hardware, memoria defectuosa: sustituir la unidad
5,4 comportamiento fallo parametrizable en el caso de un fallo Descripcin de las funciones en el caso de un fallo Posibilidades Si lo desea, puede parametrizar la reaccin de error: 3UF50-CPU Fallo Control de fallo de tensin DP Fallo (PROFIBUS-DP) PLC-CPU Fallo 3UF50-CPU Fallo Fallo del procesador perteneciente a la SIMOCODE-DP. "Conservar Estado" significa que los rels de salida permanecen activados. Slo para biestables versiones de la unidad, de lo contrario un error de parmetro 6. "No" significa que los rels de salida se desactivan. Voltage Control Fallo Fallo de la tensin de alimentacin para el SIMOCODE-DP. "Conservar Estado" significa que los rels de salida permanecen activados. Slo para las versiones biestables de la unidad, de lo contrario Parmetro Error 6. Cuando la tensin de alimentacin se restablece, el SIMOCODE-DP siempre se desactiva todas las salidas de rel en primer lugar. Usted tiene que encenderlos de nuevo. "Off" significa que el rels de salida se desactivan. DP El incumplimiento de fallo de la red PROFIBUS-DP. Slo para el Control Soint "libre DP" (software del conmutador S1 = S2 = 1, modo de funcionamiento 4). El intercambio cclico de datos tiene que haber comenzado. "Conservar Estado" significa que los controles QE1/QE2/QE3 Contactores permanecer activado. "No" significa que los controles de contactor QE1/QE2/QE3 se desactivan. Cuando el PROFIBUS-DP se recupera, hay que reconocerlo.
PLC-CPU Fallo El fallo del controlador programable. El bloque de funcin "PLC-CPU" tiene que ser asignado. El SIMOCODE-DP detecta un fallo si los cambios de seal de 1 a 0. "Conservar Estado" significa que los controles QE1/QE2/QE3 Contactores permanecer activado. "No" significa que los controles de contactor QE1/QE2/QE3 se desactivan. Cuando el controlador programable se recupere, hay que reconocerlo.
CAPTULO 6: Comunicacin / Transmisin de datos 6.1 Introduccin a PROFIBUS-DP 6.1.1 Definiciones PROFIBUS-DP PROFIBUS sistema de bus con el protocolo DP. DP significa periferia descentralizada. La tarea principal del PROFIBUS-DP es permitir el intercambio rpido cclico de datos entre el maestro DP y el centro de los dispositivos perifricos. PROFIBUS-DPV1 PROFIBUS-DPV1 es una extensin del protocolo DP. Es, adems, permite el intercambio de datos de parmetros acclico, datos de diagnstico, datos de control y datos de ensayos. Maestro DP Un maestro que lleva a cabo de acuerdo con la norma EN 50 170, volumen 2, PROFIBUS, con el protocolo DP, es conocido como un maestro DP. Master class 1 Una clase magistral 1 es una estacin activa en el PROFIBUS-DP. Un rasgo caracterstico es el intercambio cclico de datos con otras estaciones. Una clase tpica maestro 1 es, por ejemplo, un controlador programable con una conexin PROFIBUS-DP. Master class 2 Una clase magistral 2 es una estacin opcional en el PROFIBUS-DP. Una clase tpica maestro 2 es, por ejemplo, un PC / PU con una interfaz MPI y elSoftware WinSIMOCODE-DP/Professional. Esclavo DP / esclavo DP estndar Un esclavo que se opera en el bus PROFIBUS con el protocolo PROFIBUS-DP y que se lleva a cabo de acuerdo con la norma EN 50 170, volumen 2, PROFIBUS, es conocido como un esclavo DP. SIMOCODE-DP esclavo S7 Un esclavo SIMOCODE-DP S7 es un esclavo en particular con las siguientes propiedades: Es compatible con el modelo S7 (alarmas de diagnstico, alarmas de proceso) Es parametrizable Lectura / escritura de registros de datos Si desea utilizar SIMOCODE-DP como esclavo S7, consulte la informacin ms reciente sobre el Internet en http://www.ad.siemens.de/ans/2/support/download Tipo de datos / archivos DMD datos maestros de dispositivo (DMD) contienen descripciones de esclavos DP en un formato estandarizado. Con DMD hace ms fcil configurar el maestro y el esclavo DP. OM-SIMOCODE-DP El OM-SIMOCODE-DP (objeto manager) es un pedazo de software con el que se puede activar o desactivar las alarmas, por ejemplo, en el paso 7. El OM-SIMOCODE-DP es la interfaz a Win-SIMOCODE-DP/Professional (si est instalado).
6.2 Las posibilidades de transmisin de datos Las posibilidades de transmisin de datos El cuadro siguiente muestra las posibilidades de transmisin de datos: Escritura de datos de escritura de datos significa que los datos se transmiten al sistema SIMOCODE-DP. Lectura de los datos de lectura de datos significa que los datos se transmiten desde el sistema SIMOCODE-DP.
6,3 Descripcin de los mensajes Cclico de datos Los datos cclicos se intercambian entre el maestro PROFIBUS-DP y esclavo una vez en cada ciclo DP. Esto implica el mdulo PROFIBUS-DP el envo de los datos de control para SIMOCODE-DP, con SIMOCODE-DP enva los datos de sealizacin al mdulo maestro en respuesta. Mediante la asignacin de parmetros se puede elegir entre tres tipos bsicos de SIMOCODE-DP, los cuales determinan el contenido de los datos cclicos: Tipo bsico 1: master -> SIMOCODE-DP: 4 bytes; SIMOCODE-DP-> master: 12 bytes Tipo bsico 2: master -> SIMOCODE-DP: 4 bytes; SIMOCODE-DP-> master: 4 bytes Tipo bsico 3: master -> SIMOCODE-DP: 4 bytes; SIMOCODE-DP-> master: 4 bytes .
Una descripcin detallada se encuentra en el apndice. Los datos de diagnstico Los datos de diagnstico contienen informacin importante sobre el estado de SIMOCODE-DP. Esto lo convierte en la solucin de problemas simplificada. En contraste con los datos cclicos, los datos de diagnstico slo se transmiten al mdulo maestro en el caso de un cambio. De acuerdo con PROFIBUS-DP, se establece una distincin entre los siguientes: Diagnstico estndar Relacionado con el aparato diagnstico de acuerdo con la norma DP (DP en el modo de funcionamiento estndar) Relacionado con el aparato diagnstico de acuerdo a la norma DPV1 (DPV1 en funcionamiento modo) como un esclavo DPV1 Alarmas (en el modo de operacin DPV1) como un esclavo S7. Una descripcin detallada se encuentra en el apndice. Los datos de parmetros durante el arranque En cada inicio de SIMOCODE-DP en el PROFIBUS-DP, los parmetros se envan al dispositivo. Dependiendo del mdulo maestro se usa, los parmetros de transmisin son parmetros estndar o parmetros estndar de los parmetros + SIMOCODE-DP. Si los parmetros de los dispositivos actuales de SIMOCODE-DP han de ser reemplazados por los parmetros de arranque, bloque DP = no se debe establecer. Si Bloque DP = yes, los parmetros iniciales se descartan y los actuales SIMOCODE-DP parmetros permanecen activos. Configuracin de los parmetros de partida se lleva a cabo con la herramienta de configuracin si el tipo de archivo de datos / archivo DMD se carga (cuando se conecta como un esclavo estndar / esclavo DPV1) o con Win-SIMOCODE-DP/Professional (cuando se conecta como un esclavo S7). Lectura y escritura de registros de datos acclicos Si est utilizando SIMOCODE-DP en el modo de operacin DPV1, puede hacer uso de las funciones de la extensin PROFIBUS-DP estndar. Un aspecto de esto incluye los acclicos servicios DPV1 para leer y escribir registros de datos. Esto hace que sea posible llevar a cabo el control del operador, seguimiento y parametrizacin en tiempo de ejecucin. Si usted tiene el SIMATIC S5-IM308-C mdulo maestro accede a estos servicios a travs del bloque de funcin FB IM308-C, mientras que con SIMATIC S7 hay funcin de llamadas al sistema previsto, Read_Rec y Write_Rec. El procedimiento para la lectura y la escritura se puede ver en los ejemplos, la descripcin de los registros de datos se proporciona en el Apndice.
6.4 Ajustes necesarios para la comunicacin de bus con SIMOCODE-DP Tabla La tabla siguiente muestra qu parmetros de bus se pueden introducir en el SIMOCODE-DP y en el maestro. Parmetros del bus en los campos grises deben coincidir en el SIMOCODE-DP y el maestro con el fin de permitir la comunicacin tenga lugar.
Direccin del bus Las direcciones de bus para SIMOCODE-DP dispositivos pueden estar en el rango de 0 a 126. Cada direccin de bus se puede asignar ms de una vez dentro del sistema de bus. Velocidad de transmisin Las siguientes velocidades son permisibles para SIMOCODE-DP dispositivos: 9,6 kbit / s, el 19,2 kbit / s, 45,45 kbit / s, 93,75 kbit / s, 187,5 kbit / s, 500 kbit / s, 1,5 MB.
Tipo bsico Usted puede elegir entre diferentes tipos bsicos para el intercambio cclico de datos entre SIMOCODE-DP y el maestro DP:
Modo de funcionamiento SIMOCODE-DP distingue entre dos modos de funcionamiento para la comunicacin PROFIBUS-DP: DP estndar: seleccione este modo de funcionamiento si quiere utilizar SIMOCODE-DP como esclavo estndar (con el nmero de identificacin 0x8031). El dispositivo es entonces compatible con los estados anteriores del producto. Configuracin: con los archivos de tipos de datos / archivos DMD. DPV1: elija este modo de funcionamiento si quiere utilizar SIMOCODE-DP como esclavo DPV1 o S7 (con el nmero de identificacin 0x8069). En este modo de funcionamiento de la unidad hace DPV1 servicios disponibles. Configuracin: como esclavo DPV1 con la SIEM8069.GSG archivo DMD, como un esclavo S7 con el administrador de objetos OM-SIMOCODE-DP en STEP 7. Bloquear DP s / no Con el parmetro bus "DP Bloque" le indicar SIMOCODE-DP para ignorar todos los datos de los parmetros que se transmiten a los esclavos DP durante el inicio del Maestro DP. Los datos de los parmetros que SIMOCODE-DP posee en una memoria no voltil no son sobrescritos por el maestro DP en este caso. Cuando se selecciona "Bloquear DP" est activo, slo podr modificar los datos de los parmetros mediante la introduccin de los nuevos valores a travs de la PC. Precaucin! Cuando el bloque DP est desactivado, la prxima vez que PROFIBUS-DP se reinicia (arranque del procesador de comunicaciones CP / IM) los ajustes de parmetros actuales del SIMOCODE-DP se sobrescribir con el registro de datos de la tarjeta de memoria, etc Esto puede hacer que la funcin de control previo ineficaz y dar lugar a cortocircuitos en la rama.
Diagnstico segn norma DP para IM308B Especial especfica del dispositivo diagnstico de acuerdo con la norma DP para el mdulo maestro IM308-B: Si el diagnstico parmetro corta: se selecciona S, SIMOCODE-DP genera diagnstico con una longitud de 7 bytes, que consta de una cabecera de 007 bytes H y los ltimos 6 bytes del diagnstico anterior. Diagnstico segn DPV1 Si el ajuste es diagnstico Diagnstico segn DPV1 = yes, SIMOCODE-DP genera diagnstico especfico del dispositivo de acuerdo con DPV1. Cada vez que se produce un cambio, el diagnstico se retransmite al mdulo principal. Si el ajuste es Diagnstico segn DPV1 = no, no hay un diagnstico. Usted puede obtener la informacin SIMOCODE-DP mediante la lectura de los registros de datos pertinentes. Los detalles de la estructura de diagnstico se proporcionan en el apndice. Las alarmas de la OM-SIMOCODE-DP puede activar y desactivar los siguientes SIMOCODE-DP alarmas: Diagnstico de alarma Proceso de alarma en el caso de un fallo Proceso de alarma en el caso de una advertencia. Si una alarma est activa, una alarma de llegada se transmite tan pronto como la fuente de alarma = True. Si la fuente de alarma cambia a False, una alarma que se transmite. En contraste con el diagnstico, alarmas son reconocidas, lo que significa que la informacin no se puede sobrescribir y de esa forma perdera. Una explicacin detallada del mtodo de funcionamiento se da en el apndice.
6.5.3 SIMOCODE-DP con SIMATIC S7 maestro DP (CPU integrado con interfaz DP) Configurar el sistema maestro con STEP 7 HW Config STEP7 versin V4.0x El requisito previo para ligarse SIMOCODE-DP utilizando los mtodos descritos a continuacin es STEP7, versin V4.0x. Instalacin de la DMD / OM Con el fin de poder incluir SIMOCODE-DP unidades en el sistema principal, se necesita un conjunto correspondiente de DMD o el administrador de objetos SIMOCODE-DP. Una descripcin de que DMD archivo es necesario para que la funcionalidad es pro-proporcionadas en la pgina C-9. Si el archivo de DMD con el nivel de release necesario no se instala junto con el paquete de programas de STEP 7, deber copiar el archivo retrospectivo en el "S7DATA \ gsd" subdirectorio del grupo de programas de STEP 7. Posteriormente es posible que tenga que actualizar el archivo de DMD y / o reiniciar STEP 7. Las futuras versiones de STEP 7 ya incluye los archivos necesarios para la DMD SIMOCODE-DP. Si desea utilizar SIMOCODE-DP como esclavo S7, se requiere el siguiente software en lugar de la DMD: Objeto gerente SIMOCODE-DP (OM SIMOCODE-DP) Win-SIMOCODE-DP/Professional para el establecimiento de los parmetros del dispositivo Configuracin de SIMOCODE-DP Incluyendo SIMOCODE-DP en el sistema maestro Seleccione SIMOCODE-DP en el catlogo de conmutadores. Seleccin de una direccin PROFIBUS Seleccione una direccin PROFIBUS entre 3 y 123 para SIMOCODE-DP. Seleccin del tipo de estacin SIMOCODE-DP como esclavo DP estndar. Requisito: DMD SIEM8031.GSG Ajustar el modo de operacin a "DP estndar" con Win-SIMOCODE-DP
SIMOCODE-DP como esclavo DPV1. requisito: DMD SIEM8069.GSG Ajustar el modo de operacin a "DPV1" con Win-SIMOCODE-DP
SIMOCODE-DP como esclavo S7. requisito: OM SIMOCODE-DP. El modo de funcionamiento "DPV1" set utilizando OM SIMOCODE-DP no se puede cambiar posteriormente. Seleccin de la requerida configuracin Seleccione el tipo de base adecuado. Nota La configuracin de la direccin, velocidad de transmisin y el tipo de base deben estar de acuerdo con los parmetros de bus especificados con Win-SIMOCODE-DP. El modo de funcionamiento de SIMOCODE-DP debe ajustarse a norma DP. En cuanto al acuerdo del tipo bsico se refiere, el "pacto" sufijo no es relevante (por
ejemplo: el tipo bsico seleccionado con COM PROFIBUS es de tipo compacto bsico 2 - la necesaria SIMOCODE-DP tipo de datos es bsico Tipo 2). Especificacin de los parmetros de operacin (OM solamente) Aqu es donde usted especifica las caractersticas del esclavo de SIMOCODE-DP. Para ello, seleccione la ubicacin del mdulo 4 de SIMOCODE-DP S7. Seleccione la opcin "Editar -> Propiedades del objeto" para abrir el "Esclavo DP Propiedades" de dilogo. En la pgina "Parmetros de funcionamiento" ficha seleccione el tipo de base y establecer las siguientes seales que permitan: Diagnstico de alarma Proceso de alarma en el caso de un fallo Alarma de proceso en caso de una advertencia condicin de que "Win-SIMOCODEDP/Professional" est instalado, se puede pasar a la parametrizacin de SIMOCODE-DP haciendo clic en el "Win-SIMOCODE-DP" botn.
Parametrizacin SIMOCODE-DP En la parametrizacin SIMOCODE-DP, se establece una distincin entre: Parametrizacin con archivos de DMD (SIMOCODE-DP como esclavo norma DP o esclavo DPV1) Parametrizacin con el OM SIMOCODE-DP y los paquetes de software Win-SIMOCODEDP/Professional (SIMOCODE-DP como esclavo S7) Parametrizacin SIMOCODE-DP con un archivo de DMD. Usted parametrizar SIMOCODE DP en STEP 7 HW Config (Configuracin del hardware). Para ello, abra el "Editar -> Propiedades del objeto" de dilogo. El "Parametrizar" contiene los parmetros. Un valor por defecto se muestra, que puede ser cambiado despus de hacer doble clic en el parmetro correspondiente.
Parametrizacin SIMOCODE-DP con OM SIMOCODE-DP y Win-SIMOCODE-DP/Professional Usted parametrizar SIMOCODE DP con el Win-SIMOCODE-DP/Professional
paquete de software, que se inicia a partir de STEP 7 HW Config
Despus de haber iniciado Win-SIMOCODE-DP/Professional de STEP 7 HW Config, todos los ajustes para SIMOCODE-DP que sean relevantes para PROFIBUS-DP son automticamente a los valores necesarios. Despus de que se puede establecer ms SIMOCODE-DP parmetros del dispositivo. Cuando regresa al PASO 7 -> HW Config despus de la parametrizacin, la parmetros creados con Win-SIMOCODE-DP/Professional se transfieren a HW Config. Los parmetros slo se pueden transmitir cuando la CPU est en "STOP" del Estado. Durante el arranque de la CPU de los parmetros se transmiten si SIMOCODE-DP se encuentra en el "Manual / Off" o "CST" del Estado. Los datos de diagnstico (SIMOCODE-DP como esclavo norma DP o esclavo DPV1). Si los nuevos datos de diagnstico est disponible, OB82 se activa automticamente en el S7 CPU. Si el OB 82 no est programado, la CPU cambia el funcionamiento estado de RUN a STOP. Mediante la programacin y la evaluacin de la informacin de inicio del OB 82 se puede determinar qu mdulo (en este caso SIMOCODE-DP esclavo) est sealando el diagnstico. El OB82_MDL_ADDR variable temporal contiene la direccin de diagnstico de la sealizacin SIMOCODE-DP. Informacin adicional sobre el procesamiento de OB82 se proporciona en la programacin manual "Software de sistema para S7-300/400, Diseo de Software". Configure la direccin de diagnstico de SIMOCODE-DP en HW Config en el "Esclavo DP Propiedades" de dilogo, en la pestaa "General". Mediante la evaluacin de la tempoOB82_MDL_ADDR variables ral puede establecer el inicio de la lectura de la datos de diagnstico en OB 82 como sigue, por ejemplo:
Ejemplo de OB82: Hiptesis: la direccin de diagnstico del esclavo DP SIMOCODE-ha sido parametrizado con 1022 en HW Config.
EVALUACION DE LOS DATOS DE DIAGNOSTICO Con el fin de permitir que los datos de diagnstico que deben evaluarse en el CPU, SFC1 "DPNRM_DG" debe ser llamado en el programa de aplicacin (OB1). En el siguiente ejemplo el diagnstico de SIMOCODE-DP como esclavo DP estndar se lee, con una longitud total de 20 bytes. Los datos de diagnstico se registran en el rea de datos cubiertos por el parmetro RECORD (en este caso DB10, los bytes 0 a 19). Una vez que los datos de diagnstico (longitud: 20 bytes) han sido ledos correctamente bandera M 10.2 se establece. Esta bandera indica que el diagnstico est disponible una nueva. Despus de que el diagnstico se ha evaluado en el programa de aplicacin, bandera 10,2 M se pone a cero. Para ms informacin sobre el procesamiento de la SFC 13 se proporciona en la seccin "Software de sistema para S7-300/400 Funciones del sistema y estndar" manual de referencia.
Ejemplo de OB1: Hiptesis: la direccin de diagnstico del esclavo SIMOCODE-DP ha sido parametrizado con 1022 en HW Config.
DIAGNOSTICO SEGN DPV1 Los datos de diagnstico estn disponibles de acuerdo con DPV1 si ha configurado SIMOCODEDP como esclavo DPV1. Condicin previa: el diagnstico de acuerdo con DPV1 se ha activado configurando el parmetro en "S" "Diagnstico acc a DPV1.". (Para todos los dispositivos SIMOCODE-DP en HW Config en el "Esclavo DP Propiedades" en el "Parametrizar" ficha). Solicitar datos de diagnstico El procedimiento para solicitar datos de diagnstico es esencialmente el mismo que para el ejemplo anterior de la norma DP. La diferencia es la longitud de la informacin de diagnstico. En este caso es 17 bytes. Los ajustes son necesarios los siguientes:
El parmetro RECORD deben adaptarse con P # DB10.DBX 0.0 BYTE 17. La evaluacin de RET_VAL con la comparacin de la longitud tiene que ser adaptada a 17. Si los datos de diagnstico de acuerdo con DPV1 no estn activadas (valor predeterminado), la evaluacin tal como se describe en el ejemplo anterior no es posible porque no hay eventos de diagnstico se indican desde el OB 82.
La evaluacin de diagnstico y el proceso de alarmas (SIMOCODE-DP como esclavo S7). Si SIMOCODE-DP es operado como un esclavo S7, la informacin de diagnstico se pone a disposicin en forma de alarmas de diagnstico y de proceso. Para ello, tienen que estar activada (figura de la pgina 6-26). Las alarmas de proceso Si una alarma est presente proceso, OB 40 se llama automticamente en la CPU S7. Si OB 40 no est programado, la CPU cambia al estado operativo de RUN a STOP. Al programar y evaluar la informacin de arranque del OB 40 se puede determinar qu mdulo (en este caso SIMOCODE-DP esclavo) est sealando el diagnstico. El OB40_MDL_ADDR variable temporal contiene la direccin base lgica del SIMOCODE-DP que ha disparado la alarma. Configure la direccin base lgica para SIMOCODE-DP en HW Config en el "Esclavo DP Propiedades" de dilogo en la ficha "Direcciones". La informacin actual de diagnstico (estado de alarma del mdulo) para la direccin base lgica contiene la OB40_POINT_ADDR variable. Para ms informacin sobre el procesamiento de OB40 se proporciona en el manual de programacin "Software de sistema para S7-300/400 Diseo de Software,". Mediante la evaluacin de la OB40_MDL_ADDR variable temporal, por lo tanto, en el OB40 para cada SIMOCODE-DP el estado de alarma del mdulo se puede transferir a un rea de memoria asignado y la iniciacin de la evaluacin se puede establecer.
Ejemplo de OB40 Hiptesis: la direccin base lgica para el esclavo SIMOCODE-DP ha sido parametrizado con 256 en HW Config.
Los Datos de Alarma 'entonces' s evalan en el Programa cclico. Despus de la evaluacin de los Datos de Proceso de Alarma en el Programa de Aplicacin cclica, el inicio propiamente restablece. ejemplo de OB1:
Alarmas Diagnstico Si la alarma de diagnstico est presente, OB82 se llama automticamente en la CPU S7. Si el OB 82 no est programado, la CPU cambia al estado operativo de RUN a STOP. Mediante la programacin y evaluacin de la informacin de arranque del OB 82 se puede determinar qu mdulo (en este caso SIMOCODE-DP esclavo) est sealando el diagnstico. El OB82_MDL_ADDR variable temporal contiene la direccin base lgica del SIMOCODE-DP que ha disparado la alarma. Configure la direccin base lgica para SIMOCODE-DP en HW Config en el "Esclavo DP Propiedades" de dilogo en la ficha "Direcciones". La informacin actual de diagnstico (defecto del mdulo) para la direccin base lgica contiene la OB82_MDL_DEFECT variable. Mediante la evaluacin de la OB82_MDL_DEFECT
variable temporal, por lo tanto, en el OB82 para cada SIMOCODE-DP el estado de la falla SIMOCODE-DP se puede introducir en un rea de memoria asignado y la iniciacin de la evaluacin puede estar establecida. Ejemplo de OB82. Ejemplo de OB82: Hiptesis: la direccin base lgica para el esclavo SIMOCODE-DP ha sido parametrizado con 256 en HW Config.
Los datos de alarma se evalan entonces en el programa cclico. Despus de la evaluacin de los datos de diagnstico de alarma en el programa de aplicacin cclica, el inicio se restablece. Ejemplo de OB1
Escritura de registros de datos / leer registros de datos (SIMOCODE-DP como esclavo DPV1 o S7) Puede acceder SIMOCODE-DP registros de datos desde el programa de aplicacin si est ejecutando SIMOCODE-DP en el modo de operacin DPV1 como un esclavo DPV1 o S7 conectada a una CPU S7 con una interfaz DP. Escribir registros de datos: llamando a la SFC 58 "WR_REC" Leer registros de datos: llamando a la SFC 59 "RD_REC". Ms informacin sobre los SFCs se proporciona en el "Software de sistema para S7-300/400 Funciones del sistema y estndar" manual de referencia.
Nota Si SIMOCODE-DP se configura como un esclavo DPV1 (con siem8069.gsg archivo DMD), que los siguientes valores se deben asignar a los parmetros IOID y LADDR: IOID: siempre B # 16 # 54, independientemente de si es o no salidas de ocupar las direcciones ms bajas LADDR: siempre la direccin de la ranura 0, independientemente de si la ranura 0 ocupa la direccin ms baja (desviacin de la descripcin de parmetros de SFC58/59 en el manual de referencia "Software de sistema para S7-300/400 Funciones del sistema y estndar" ) Escribir datos de ejemplo de registro En este ejemplo, los datos estadsticos deben ser escritos a los 133 SIMOCODE-DP-DS. La direccin 256 se ha configurado para SIMOCODE-DP como esclavo DPV1 en HW Config en el "Esclavo DP Propiedades" en el campo "Direccin / Identificacin" ficha de la ranura 0. Si SIMOCODE-DP opera como esclavo S7, la direccin 256 se ha configurado para las entradas y salidas en HW Config en "Propiedades del esclavo DP" de dilogo en la ficha "Direcciones". El registro de datos que se va a escribir se debe introducir en DB20, bytes 0 a 6. El contador de horas de funcionamiento se debe ajustar a 213 * 10, el nmero de arranques del motor a 244 y el nmero de viajes a 4. Ejemplo de DB 20:
Escribir DS 133 se inicia una vez que slo mediante el establecimiento de REQ.
Ejemplo de OB1
Ejemplo Leer registro de datos En el siguiente ejemplo el DS 131 - Display / diagnstico de SIMOCODE-DP se ha de leer. La direccin 256 se ha configurado para SIMOCODE-DP como esclavo DPV1 en HW Config en el "Esclavo DP Propiedades" en el campo "Direccin / Identificacin" ficha de la ranura 0. Si SIMOCODE-DP opera como esclavo S7, la direccin 256 se ha configurado para las entradas y salidas en HW Config en "Propiedades del esclavo DP" de dilogo en la ficha "Direcciones". El registro de datos que se lee es que se indicar en DB20, los bytes 0 a 17. Lectura DS 131 tiene lugar en funcionamiento temporizado por ejemplo en el OB de tiempo de interrupcin, iniciada mediante el establecimiento de REQ, mientras SFC 59 "RD_REC" se llama en el OB1. Ejemplo de OB1:
Despus de que se ha ledo con xito, DS 131 est contenido en el rea de datos cubiertos por el parmetro de registro (en este caso DB20, bytes 0 a 17)
Los mensajes de error Los mensajes de error se transfieren en RET_VAL (80 + Cdigo de error 1 en la pgina 6-23). Ejemplo: RET_VAL = 80A9: "El servicio no es compatible" CONFIGURACION PROFIBUS DP
Definicin: Los datos bsicos especificados en esta seccin se aplican a los productos de Siemens y cables. Qu es un segmento de bus? El PROFIBUS-DP se compone de un segmento de bus al menos uno. Un segmento de bus tiene por lo menos dos estaciones, una de las cuales tiene que ser un maestro DP. Un mximo de 32 estaciones se puede conectar a un segmento de bus. Una resistencia de terminacin tiene que ser conectado al principio y al final del bus.
Datos bsicos para un segmento de bus En un segmento de bus, se puede conectar un mximo de 32 estaciones entre s. La longitud de cable mxima de un segmento de bus depende de la velocidad de transmisin que se ha fijado.
El cable de bus se conecta en bucle a travs de todos los dispositivos SIMOCODE-DP. Tiene que ser terminado en ambos extremos con una resistencia. El conector de bus contiene una resistencia de terminacin que se pueden conectar, si es necesario. Reglas para ms de 32 estaciones Si desea utilizar ms de 32 estaciones en un bus, hay que unir los segmentos de bus a travs de repetidores RS 485. Un repetidor cuenta como una estacin fsica en ambos segmentos de bus. No ocupa una direccin. Todos los segmentos de bus juntos tienen que tener al menos un maestro y un esclavo DP DP. Datos bsicos para los segmentos de bus que unen En el sistema ET 200 perifrica descentralizada, se puede utilizar un mximo de 126 estaciones en un bus, de los cuales un mximo de 124 puede ser esclavos DP. Con una IM 308-C, que puede enviar seales a un mximo de 122 esclavos DP. Cada repetidor RS 485 cuenta como estacin fsico (Razn: se consume energa), pero que no ocupa una direccin de bus. Tan pronto como un repetidor RS 485 est en un segmento, slo un mximo de 31 estaciones adicionales se pueden conectar. El nmero de repetidores RS 485 no tiene efecto sobre el nmero total de estaciones en un autobs. Hasta 10 segmentos de bus se puede colocar en una fila. La distancia entre las estaciones ms distantes no debe exceder de los valores indicados en la tabla siguiente.
Longitud de las lneas derivadas Si no pase el cable de bus directamente a travs del conector de bus, por ejemplo, si el MCC con unidades dibujable se utilizan o si se utilizan terminales de autobuses, tiene que mantenerse dentro de las longitudes mximas de los cables de derivacin. La tabla siguiente contiene las longitudes mximas de las lneas pertenecientes a un segmento.
El cableado y la conexin de la T-clamp Proceda de la siguiente manera, si se utiliza un T-clamp.
El uso de mdulos de terminacin de bus El mdulo de terminacin 3UF1900-1K.00 bus es el ms adecuado para su utilizacin en MCC ramas motoras. Se asegura la correcta terminacin del bus incluso cuando las unidades MCC extrables se han eliminado. El mdulo de terminacin de bus tambin puede ser utilizado si un conector (Sub-D) estndar no se pueden utilizar en la ltima unidad de una lnea de bus. El 3UF1900-1KA00 se puede conectar a 220/230 V, 380/400 V, 115/120 V o 24 V de voltaje de CA segn se requiera. Para tensin de 24 V DC, se puede utilizar la versin 3UF1900-1KB00.
Parametrizacin / Observacin 7.1 Modalidades de parametrizacin 7.1.1 Parametrizacin en tiempo de ejecucin Punto-a-punto conexin: Punto a punto a travs de la interfaz del sistema SIMOCODE-DP y un personal ordenador (PC) con o Win-SIMOCODE-DP/Smart Win-SIMOCODE-DP/Professional. Para la conexin de PC y SIMOCODE-DP, utilizar el cable de conexin correspondiente con el nmero de orden siguiente: 3RW29 20-1DA00 - Leer / escribir datos de parmetros sin interrupcin de la comunicacin por bus desde / hasta el SIMOCODE-DP - Un nico dispositivo de parametrizacin Master class 2 Win-SIMOCODE-DP /profesional A travs de computadora personal (PC) que integra maestro PROFIBUS-DP
tarjetas de interfaz, por ejemplo CP 5412 y Win-SIMOCODE-DP/Professional - Leer / escribir datos de parmetros sin interrupcin de la comunicacin por bus desde / hasta el SIMOCODE-DP - Todos los aparatos SIMOCODE-DP en la lnea de autobs son parametrizables Master class 1 En el programa de aplicacin - Leer / escribir registro de datos parmetro 138 en lnea sin interrupcin del la comunicacin de bus desde / hasta el SIMOCODE-DP - Todos los aparatos SIMOCODE-DP en la lnea de autobs son parametrizables 7.1.2 Parametrizacin durante el arranque PASO 7 / Tipo de archivo de datos / DMD A travs de STEP 7 con SIMATIC S7. - Parametrizacin a travs de STEP 7 - Escribir datos de los parmetros de la CPU a la SIMOCODE-DP durante el arranque - Todos los aparatos SIMOCODE-DP en la lnea de autobs son parametrizables PASO 7 / OM-SIMOCODE-DP Win-SIMOCODE-DP / Profesional A travs de STEP 7 mediante OM-SIMOCODE-DP. - Parametrizacin a travs de Win-SIMOCODE-DP/Professional - Escribir datos de los parmetros de la CPU a la SIMOCODE-DP durante el arranque - Todos los aparatos SIMOCODE-DP en la lnea de autobs son parametrizables S5 - COM-PROFIBUS Tipo de archivo de datos / DMD A travs de COM-PROFIBUS con SIMATIC S5. - Parametrizacin de la tarjeta de memoria a travs de COM PROFIBUS - Escribir datos de los parmetros de la tarjeta de memoria a la SIMOCODE-DP en el arranque del procesador de comunicaciones - Todos los aparatos SIMOCODE-DP en la lnea de autobs son parametrizables
Tabla de canales de parmetros La tabla siguiente muestra qu parmetros se pueden ajustar a travs de qu canal de parmetros:
7.2 Fundamentos de la parametrizacin Parametrizacin Para parametrizar la funcionalidad requerida, parmetros como la intensidad del motor para la correcta proteccin del motor debe ser ajustado. (comparable con el establecimiento de la corriente del motor en un rel trmico de sobrecarga) Configuracin La siguiente figura muestra cmo se establece la corriente del motor (ajuste actual) con Win-SIMOCODE-DP .
Conexin de Elementos gratuitos: Si necesita una determinada funcin, por ejemplo, Cambio de la salida de rel OUT 2 con entrada IN4 de la Unidad Bsica, deber conectar los elementos libres entre s.
Conexiones lgicas internas surgen por la conexin. El diagrama de bloques de las asignaciones en la pgina A-17 muestra una visin general de los elementos libres. Ejemplo La siguiente figura muestra de establecer la conexin con Win-SIMOCODE-DP:
Smbolos utilizados Un enchufe se puede emplear con la frecuencia deseada. Tiene un nmero de asignacin fija. Usted encontrar esto en la tabla de asignacin en la pgina A-2. Un tapn puede ser utilizado slo una vez. El "Socket" smbolo identifica una salida lgica interna que puede asignar la frecuencia que se desee. Tiene un nmero de asignacin fija. Usted encontrar esto en la tabla de asignacin.
Parametrizacin de asistencia Se encuentra dentro de las entradas del dispositivo en la tabla de parmetros a partir de la pgina A-19 dispuestos de acuerdo a los grupos principales y subgrupos. Por defecto "255" significa "no asignada" (abierto). La funcin correspondiente se activa de forma automtica mediante la parametrizacin otro nmero de asignacin. Encontrar los nmeros de asignacin de las salidas en el interior del dispositivo en la pgina de tabla de asignacin de A-2. Puede copiar la tabla de parmetros con el fin de introducir los nmeros de asignacin y los ajustes cuando configure. Los libres "valor" columnas seleccionadas se proporcionan para esto. As se han documentado todos los parmetros simultneamente. transmisin de parmetros SIMOCODE-DP se puede parametrizar slo si es en el "Manual" y el estado "Off". en la "Entrada de seal de prueba de nuevo" estado (CST), el estado del producto E10 o superior Si no fuera posible parametrizar SIMOCODE-DP, es posible realizar un restablecimiento general. Usted ve en la pgina G-2 cmo realizar un restablecimiento general. Todos los datos de parmetros no voltiles permanecen almacenados en el SIMOCODE-DP en caso de fallo de la tensin de alimentacin. 7.3 Parametrizar y observando con Win-SIMOCODE-DP 7.3.1 Introduccin y notas Cul es Win-SIMOCODE-DP? Win-SIMOCODE-DP se parametrizacin, operacin y observacin de software que est instalado en un PC o PU. Hay 2 versiones de Win-SIMOCODE-DP: Win-SIMOCODE-DP/Smart Win-SIMOCODE-DP/Professional
La tabla siguiente muestra qu versin de Win-SIMOCODE-DP se puede utilizar para la parametrizacin, la observacin y el ensayo de SIMOCODE-DP, utilizando qu canal, como una funcin de la condicin de producto (E):
conocimientos necesarios : Se requieren los siguientes conocimientos para trabajar con WinSIMOCODE-DP: Windows 95 o Windows NT. SIMOCODE-DP del sistema, la parametrizacin Ayuda en lnea Win-SIMOCODE-DP es en gran parte explica por s mismo y tambin posee una amplia ayuda en lnea que rpidamente le ofrece informacin sobre todos los temas. Configuracin del equipo mnimo Para poder operar Win-SIMOCODE-DP, se necesita por lo menos: Win-SIMOCODE-DP/Professional Win-SIMOCODE-DP/Smart PC / PU prerrequisito Windows 95 o Windows NT 4.0 Memoria libre en el disco duro de al menos 10 MB Interfaz COM libre Cable de conexin RS232 (Ordenanza N 3RW2920-1DA00)
Master card, por ejemplo, MPI, CP5411, CP5412, CP551, CP5611 Cable MPI (5 m) para la conexin a SIMATIC S7/M7/C7l (Referencia 6ES7901-0BF00-0AA0) Forma de Entrega Win-SIMOCODE-DP/Smart: Disquetes de 3,5 Pulgadas (Numero de Pedido 3UF5711-0AA00-0) Win-SIMOCODE-DP/Professional: Disquetes de 3,5 Pulgadas (Numero de Pedido 3UF5710-0AA00-0) Instalacin Siga ESTOS Pasos prr Instalar Win-SIMOCODE-DP: 1. Inserte el disquete 1 en la Unidad de disquete. 2. Seleccione "Configuracion -> Panel de Control" en el men de inicio de Windows. 3. Seleccione "Sistema de control -> Agregar / Quitar Programas". 4. En la opcin "Agregar / Quitar Programas" Seleccione el "Install/Uninpuesto "ficha y Haga clic en el Botn" Instalar ". Florerias Configurar la Unidad, ASI COMO la Ruta de Acceso al Programa de configuracion en la Siguiente Ventana. El Programa de Instalacin le guiar a Travs de Toda la Instalacin. Nota Desinstale los mayores Win-SIMOCODE-DP versiones antes de instalar Win SIMOCODEDP. 7.3.2 Despus de la instalacin Win-SIMOCODE-DP / Profesional Una vez que haya instalado y Win-SIMOCODE-DP/Professional haya reiniciado el ordenador, primero debe configurar la interfaz de PC-PU si no est establecido todava - para el PROFIBUS-DP. Configuracin de la interfaz de PC-PU 1. Seleccione en el men Inicio de Windows: Programas -> Win-SIMOCODE-DP_Pro -> Definir PC-interface PU 2. Seleccione la interfaz correspondiente en la "ruta de acceso" tab
3. Abra la ventana "Propiedades" y adaptar los parmetros de la estacin y de la red de la red PROFIBUS-DP. Haga clic en "Aceptar" en la ventana "Propiedades".
4. Haga clic en "Instalar" en la "va de acceso" ficha. La interfaz de PC-PU tanto, lo fija. 7.3.3 Inicio del programa Run-up Inicie el programa. Seleccione en el men Inicio de Windows: Programas -> Win-SIMOCODE-DP_Pro -> Win-SIMOCODE-DP_Pro. Despus de WinSIMOCODE-DP se ha quedado arriba, aparece la siguiente ventana:
Barra de ttulo La barra de ttulo contiene la ruta del archivo smc el estado del dispositivo, en lnea o fuera de lnea La direccin PROFIBUS-DP del estado del dispositivo en lnea La versin de Win-SIMOCODE, Professional o Smart
Barra de mens La barra de mens contiene los mens SIMOCODE-DP Sistema de destino Ver Opciones Ayuda Los mens se describen en detalle a continuacin
Barra de herramientas La barra de herramientas contiene iconos con los que se puede acceder a algunas opciones de los mens de clic del ratn. Si te quedas con el puntero del ratn por alrededor de 1 segundo en el icono, se mostrar su funcin en lenguaje claro. Ventana principal La ventana principal contiene todos los parmetros que se pueden configurar y asignar. Los parmetros ya se han introducido en las secciones precedentes en la manual. Por lo tanto, las explicaciones no se proporcionan en este lugar. Utilice la ayuda en lnea si necesita ms informacin. Barra de estado La barra de estado contiene el conjunto de la interfaz. Puede abrir el "Interfaces" ventana directamente haciendo doble clic y seleccione la interfaz La direccin PROFIBUS-DP. 7.3.4 Barra de mens SIMOCODE-DP Del sistema Si hace clic en SIMOCODE-DP en la barra de men, y luego las siguientes opciones aparecen:
Aqu se puede Crear nuevos archivos Abrir archivos Open Online, es decir, abrir directamente desde SIMOCODE-DP Guardar Imprimir Salir Win-SIMOCODE-DP
Todos los archivos SIMOCODE-DP tienen la extensin de archivo *. Smc. Objetivo sistema Diagrama Si hace clic en sistema de destino en la barra de men, y luego las funciones en lnea aparecen los siguientes: Aqu se puede Cargar archivos desde el PC a / PU SIMOCODE-DP Cargar archivos de SIMOCODE-DP en el PC / PG Las siguientes funciones se describen a continuacin: Control / seal Mostrar / Diagnstico Estadsticas Sata Test Comparacin de valores reales Firmware Version
Todas las funciones en lnea trabajar con la interfaz serie. Usted ve en la pgina 7-17 cmo configurar la interfaz. Control / seal Si se hace clic sobre el control / seal en el men Sistema de destino, los siguientes Aparece la ventana:
Aqu puede controlar la sucursal, reiniciar el dispositivo e iniciar una prueba de hardware con los botones superiores. Usted recibe una visin general del estado del dispositivo momentneo con las pantallas LED. Mostrar / Diagnstico Si usted hace clic en Pantalla / Diagnstico en el men Sistema de destino, aparece la siguiente ventana:
Aqu puede ver la corriente de operacin corriente en la rama, as como la pantallas siguientes: Ajuste actual La corriente en la rama en el ltimo disparo por sobrecarga (en% de la corriente set) Tiempo de enfriamiento restante Nmero de arranques Horas de funcionamiento Nmero de disparos por sobrecarga Lectura del contador 1 y 2 Valor analgico Sensor del termistor Datos estadsticos Si hace clic en los datos estadsticos en el men Sistema de destino, aparece la siguiente ventana:
Los siguientes datos se muestran aqu: Horas de funcionamiento *h+ Rango: 0 ... 65 5350 Nmero de sobrecarga Gama Viajes: 0 ... 65 535 Nmero de arranques Range: 0 ... 16 777 215 Usted puede cambiar los datos si ha sustituido los dispositivos, por ejemplo. Introduzca un nuevo valor en el cuadro de texto de la derecha y luego confirme con el botn "Set". El valor es aceptado por el dispositivo. Las horas de funcionamiento slo se puede introducir en pasos de diez. Prueba Si hace clic en Probar en el men de sistema de destino, la siguiente ventana aparece:
Aqu usted puede tener los estados lgicos de las entradas en el interior del dispositivo (tapones) muestra. Debe configurar los parmetros de funcin o asignar puntos de prueba para este fin.
Los iconos que indican el estado de la lmpara lgica: seales amarillas lgico "1" seales negras lgico "0" gris indica un estado indefinido, por ejemplo con salidas no asignadas Puede configurar todos los parmetros de la funcin de lgica "0" o un "1" haciendo clic en uno de los botones asignados. Puede consultar el estado de las entradas y salidas arbitrarias con "Medicin Puntos " Por ejemplo, puede probar el funcionamiento de Tablas de verdad con este mtodo. Valor real comparacin. Si haces click en comparacin del valor actual en el men Sistema de destino y luego Win-SIMOCODE-DP compara el registro de datos desde el dispositivo conectado con el conjunto actual de datos en la memoria principal.
Un mensaje en cuanto a si los parmetros de acuerdo o no est de acuerdo aparece. Firmware Version Si hace clic en la versin del firmware en el men Sistema de destino, entonces Win-SIMOCODE-DP enva la versin del firmware de la conexin dispositivo. Indique este nmero si tiene preguntas con respecto a su SIMOCODE-DP dispositivo.
VER Si hace clic en Ver en la barra de men, a continuacin, puede mostrar o eliminar la la barra de estado y la barra de herramientas all.
Opciones Si hace clic en Opciones en la barra de men, a continuacin, puede cambiar el directorio, la interfaz y el idioma all. Tambin puede abrir el "Interface" de la ventana en la barra de estado, haga doble clic en el botn con la interfaz serie. Ayuda Si usted hace clic en Ayuda en la barra de men, a continuacin, recibir all una visin general de los temas de ayuda, as como una breve informacin sobre Win-SIMOCODE-DP. Ingeniera Starter Ejemplo Direct
introduccin Configuracin paso a paso En este captulo usted aprender paso a paso cmo configurar un arranque directo con SIMOCODE-DP. Tres piezas clave El procedimiento de configuracin se puede dividir en tres partes principales:
AIDS Le recomendamos que copie los siguientes documentos para ayudarle en su trabajo: SIMOCODE-DP esquema de conexiones en la pgina del apndice A-15 Diagrama de bloques en la pgina del apndice A-17
Conocimientos previos requeridos El conocimiento siguiente es necesario para el estudio de este ejemplo: Propiedades de los parmetros Los parmetros que ya han sido descritas en los captulos anteriores del manual, y por lo tanto no se proporcionan explicaciones aqu. Win-SIMOCODE-DP. Informacin sobre cmo instalar y trabajar con Win-SIMOCODE-DP se presenta en el captulo 7. 8.2 Bloque 1: Nuevo trazado un diagrama de circuito convencional como un diagrama de circuito con SIMOCODE-DP En esta seccin En esta seccin podrs encontrar la manera de convertir un esquema convencional de un paso directo de arranque a paso en un circuito con SIMOCODE-DP. Disposicin usando tecnologa convencional El siguiente diagrama muestra un diseo con tecnologa convencional:
Paso 1 Tome su copia del diagrama de circuito SIMOCODE-DP. Los siguientes elementos ya estn dibujados en el diagrama: Circuito principal Alimentacin de tensin en los bornes A1, A2 Conductor de proteccin en el terminal PE Bus de lnea en las terminales A, B, Alimentacin de tensin para los contactos de rel en la Terminal 6 Paso 2 En este paso se traza la estacin de control local en el iagram SIMOCODE-DP circuito: Pulsador S1 para Stop S2 para botn de arranque
Paso 3 Eliminar los siguientes elementos del diagrama de circuito convencional: Pulsador S1 para parada local S2 para el inicio local y enganche para contactor K1 pulsador. Estos son asumidas por SIMOCODE-DP con la funcin de control de arranque directo.
Paso 4 Nada tiene que ser dibujado en el diagrama de circuito SIMOCODE-DP debido a que estos comandos de control se transmiten a SIMOCODE-DP a travs de PROFIBUS DP. Eliminar los siguientes elementos del diagrama de circuito convencional: PLC Manual / Auto (manual / automtico cambio del sistema de automatizacin) PLC de arranque / parada (inicio / parada de la seal del sistema de automatizacin)
Paso 5 En este paso usted dibuja los siguientes elementos en el diagrama de circuito SIMOCODE-DP: Contactor K1 en una de las salidas de rel, en este caso: la salida 1 en el terminal 7. RC paralelo combinacin de la bobina del contactor para aumentar la vida de servicio de la Salidas de rel Termistor en las terminales T1 y T2
Paso 6 Eliminar los siguientes elementos del diagrama de circuito convencional: Contactor K1 rel trmico de sobrecarga con contacto auxiliar F2. SIMOCODE-DP supervisa la corriente que fluye en un momento dado en las tres fases con los transformadores de corriente integrada, y en el caso de un fallo de-energiza la bobina del contactor. Termistor evaluacin con contacto auxiliar F3. SIMOCODE-DP desenergiza la bobina del contactor si el umbral de disparo se supera.
Paso 7 Nada tiene que ser dibujado en el diagrama de circuito SIMOCODE-DP debido a que estos datos se transmiten a la SIMOCODE-DP va PROFIBUS-DP. Eliminar los siguientes elementos del diagrama de circuito convencional: Transformador de intensidad para generar una seal 4 a 20 mA. SIMOCODE-DP mide la corriente que fluye a la vez en todas las tres fases con los transformadores de corriente integrados. Q1 contacto auxiliar Las seales de las celdas en el sistema de automatizacin Analgico / convertidor digital para transformadores de corriente
Paso 8 En este paso el contacto auxiliar del fusible-seccionador est conectado a una entrada de SIMOCODE-DP. Ventajas: - Si el interruptor se abre o se ha disparado es, SIMOCODE-DP desactiva la rama motora, lo que indica un fallo. - Durante la puesta en servicio se puede probar la funcionalidad de la rama con el fusibleseccionador abierto o sin el motor. En ese caso, no mensaje de error aparece.
8.3 Bloque 2: Preparar un diagrama de bloques En esta seccin En esta seccin podrs descubrir cmo encontrar las tareas y por lo tanto los parmetros de este ejemplo, el arranque directo. Para hacer esto, es importante entender el diagrama de bloques. Cmo se utiliza el diagrama de bloques? El esquema SIMOCODE-DP en la pgina 8-10 muestra la circuitera externa para el ejemplo Arrancador directo. Con el fin de proteger a la rama de motor fiable con SIMOCODE-DP, las conexiones internas son necesarias, que se dibuja en el diagrama de bloques paso a paso. Nos referimos a las conexiones internas como las asignaciones.
diseo estructural El diagrama de bloques que muestra todo el alcance funcional del sistema SIMOCODE-DP:
1. Las cuatro salidas de la unidad 3UF50 Basic. 2. Los datos de proceso (bits de seal) que se transmiten desde el SIMOCODE-DP al maestro PROFIBUS DP. Hay tres tipos bsicos diferentes. 3. Los mdulos lgicos para la coincidencia de seales, tablas de verdad, temporizadores y contadores. 4. Las estaciones de control, entradas auxiliares de control, controles de contactores, bloques de funciones. 5. Los cuatro botones, el verde tres y tres LED amarillo del panel del operador 3UF52. 6. Las cuatro entradas de la Unidad 3UF50 Basic. 7. Los datos de proceso (bits de control) que se transmiten desde el maestro PROFIBUS-DP para el SIMOCODE-DP. 8. Las ocho entradas y cuatro salidas del mdulo de expansin 3UF51.
Los enchufes y tomas de corriente Usted se dar cuenta de que los elementos tienen enchufes y tomas de corriente. Puede conectar los diferentes elementos libres entre s por la asignacin de parmetros, para
adaptarse a sus necesidades. Un enchufe se puede utilizar tantas veces como sea necesario, mientras que un tapn puede ser utilizado slo una vez. Antes de empezar, consideraciones iniciales En primer lugar debe tener en cuenta las circunstancias en las que es permisible para cambiar la rama motora: en qu situacin y de la que la estacin de control. En este ejemplo, se especifica de la siguiente manera: Activacin y desactivacin a travs de PROFIBUS-DP en el modo automtico Iniciar y detener con S2 y S1 a travs de la estacin de control local en modo manual Breve resea del control y el bloque de la proteccin del motor Con el fin de proteger a la rama de motor fiable, debe asignar comandos de control para el control y el bloque de proteccin del motor. nota De lo contrario, las seales de habilitacin del operador Funciones de control y funciones de proteccin no tienen efecto. Estaciones de control, la funcin de control Las seales fijados por el operador de habilitacin se procesan en el bloque de control de las estaciones, y la funcin de control se procesa en el siguiente bloque. Todos los enclavamientos, operaciones lgicas y los retrasos se aplican aqu, dependiendo de la funcin de control se selecciona. Si los bloques de funcin son necesarios o entradas auxiliares de control tienen que ser utilizados, por ejemplo para el control de actuador / posicionador, estos tienen una influencia sobre la funcin de control. Funcin de proteccin del motor El ltimo bloque de esta cadena es la funcin de proteccin del motor. El contactor Controles QE1/QE2/QE3 se cambian de acuerdo con la funcin de control que se utiliza; vase la Tabla 11: en la pgina 2-27. Contactor Controles QE1/QE2/QE3 tener una seal de alta despus de un comando "On" y una seal de baja despus de un comando "Off" o en caso de fallo, es decir, el derivado del motor es fiable enciende y se apaga incluso en caso de fallo ocurrido. Activacin Confiable / desactivacin Contactor Controles QE1/QE2/QE3 fiable activar y desactivar la rama motora.
Paso 1 Dibuja los elementos externos Tome su copia del diagrama de bloques. En este paso, dibujar los siguientes elementos externos en el diagrama de bloques:
Pulsador de arranque y parada en las entradas 1,2 Q1 contacto auxiliar en la entrada 3 Contactor K1 con la combinacin RC en la salida de rel Rel1
Paso 2
Dibujar "Off / On" rdenes de control explicacin El sistema de automatizacin enva los siguientes comandos de control a travs de PROFIBUSDP: - Control bit 0.1 = "Off" - Control bit 0.2 = "On" Control de comandos a travs de la estacin de control local: - Pulsador de parada = "Off" - Inicio botn = "On" Implementacin con SIMOCODE-DP En este paso, extraer los comandos de control en el diagrama de bloques: Bit de control 0,1 = "Off" se asigna a "DP-Off" Bit de control 0,2 = "On" se asigna a "DP-On2" Pulsador de parada en la entrada 2 (In2-BU) se asigna a LC-Off Iniciar pulsador en la entrada 1 (In1-BU) se asigna a LC-On2 Las asignaciones de los bits de control se muestran en la Tabla 54: en la pgina B-7 Paso 3 Empate "manual / automtico modo" cambio explicacin En el diagrama del circuito convencional en la pgina 8-3 se puede ver que el sistema de automatizacin (PLC) se hace cargo del cambio de modo manual a automtico: - En el modo automtico la rama motora se activa a travs del sistema de automatizacin (PLC arranque / parada). Para SIMOCODE-DP que significa: - S1 recibe una seal "1" del sistema de automatizacin - S2 tiene un nivel fijo de "1" - En el modo manual de la rama motora siempre est conectado a travs de la estacin de control local (start / stop pulsador). Para SIMOCODE-DP que significa: - S1 recibe una seal "0" del sistema de automatizacin - S2 tiene un nivel fijo de "1" Como S2 siempre tiene un nivel fijo de "1", S1 es el nico responsable por el cambio entre el modo automtico y manual. Slo dos modos de funcionamiento, 2 y 4. Para ms informacin sobre los modos de operacin se muestran en la Tabla 9: en la pgina 2-24 Implementacin con SIMOCODE-DP
En este paso, extraer las siguientes conexiones en el diagrama de bloques: Bit de control 0,5 = "Modo de funcionamiento" se asigna al software S1 Interruptor de Control Mode (S1 = 1: Modo automtico, S1 = 0 y S2 = 1: modo manual). Las asignaciones de los bits de control se muestran en la Tabla 53: en la pgina B-6. A nivel fijo de "1" se asigna al interruptor de software Modo de control S2. Step 4 Draw Contactor Control explicacin De la tabla en la pgina 2-27 se puede ver que QE1 control del contactor se activa para el arranque directo. Implementacin con SIMOCODE-DP En este paso, dibujar la conexin siguiente en el diagrama de bloques: Control del Contactor QE1 se asigna a la salida de rel "1-BU" Paso 5 Dibujar bloques de funcin estndar "CST" explicacin Con el fin de probar SIMOCODE-DP sin que circule corriente en el circuito principal, utilizar el bloque de funcin estndar "CCT". Implementacin con SIMOCODE-DP En este paso, dibujar la conexin siguiente en el diagrama de bloques: Q1 contacto auxiliar en la entrada 4 (IN4-BU) se asigna a la funcin estndar bloquear "CST"
8.4 Bloque 3: Parametrizacin con Win-SIMOCODE-DP En esta seccin
En esta seccin podrs descubrir paso a paso de cmo asignar los parmetros para el "Starter directo" ejemplo con Win-SIMOCODE-DP. Paso 1 Llame Win-SIMOCODE-DP/Professional o Win-SIMOCODE-DP/Smart.
Paso 2 Abra el "nmero de pedido" de dilogo y establecer los parmetros especficos del dispositivo all. En el ejemplo, se acepta la configuracin predeterminada.
Paso 3 Abra la "sobrecarga" de dilogo. Establecer las "corrientes" Set Is1 a la corriente del motor. Is2 Definir actual slo es necesario cuando se utiliza un motor de arranque o arranque Dahlander de polos conmutables. Los otros parmetros permanecen sin cambios en este ejemplo.
Paso 4 Abra el "Sensor" de dilogo. Ajuste el tipo de detector a "Binary PTC".
Paso 5 Abra el "motor" de dilogo. Establecer la funcin de control a "Arrancador directo".
Paso 6 Abra la ventana "Estaciones de Control" de dilogo. Aqu es donde se asigna el inicio / parada de pulsadores en la estacin de control local (pgina de diagrama de bloques 8-13) hasta la estacin de control local interna [LC]. Proceda de la siguiente manera: 1. Haga clic en el botn en el lado izquierdo a "Off". En el siguiente cuadro de dilogo "Unidad Bsica de BU" seleccin de entrada 2 para la orden de parada (que se muestra a continuacin). 2. Haga clic en el botn de la izquierda junto a "On". En el siguiente cuadro de dilogo "Unidad Bsica de BU" seleccin de entrada 1 para el comando de arranque. Utilice la configuracin predeterminada para el PLC / PLS [DP] Estacin de Control y el modo de control software interruptores S1 y S2.
Las asignaciones del control local interna [LC], entonces el siguiente aspecto:
Paso 7
Desde el "Puestos de control" de dilogo, abra el siguiente cuadro de dilogo "Operador de Habilitacin" haciendo clic en el gran "Operador de Habilitacin" botn. En el ejemplo, el modo de operacin 2 o 4 est activo. Modo de funcionamiento 2 significa: Estacin de control local [LC] libre y PLC / PLS [DP] bloqueado Modo de funcionamiento 4 significa: Estacin de control local [LC] bloqueado y PLC / PLS [DP] La libre "Control + Estacin de Monitoreo [C + M]" y "Panel de operador [OP]" debe ser bloqueado. Tambin en este caso, puede aceptar la configuracin predeterminada.
Paso 8 Desde el "Bloque de funcin Entradas" de dilogo, llame al CCT. Asignar entrada 4 (pgina de diagrama de bloques 8-13) a la "Entrada de nuevo la prueba de seal" Bloque de funcin estndar. Haga clic en el botn situado junto a CST). En el siguiente cuadro de dilogo "Unidad Bsica de BU" Seleccin de entrada 4 para el CCT.
Paso 9 En la seccin "Salidas / LEDs de dispositivos" de dilogo, seleccione la unidad bsica. Asignar Control del Contactor QE1 (pgina de diagrama de bloques 8-13) al "Out 1 - Rel de salida". Haga clic en el botn al lado de la salida 1. En el siguiente cuadro de dilogo "Control de contactores" select Contactor Control 1 QE1 de salida 1.
Paso 10 Abra el "bus PROFIBUS-DP" de dilogo. Configure la direccin a 3.
Ahora ha entrado en todos los parmetros para este ejemplo, el arranque directo. Guarde el registro de parmetros en el disco duro o en un disquete y transferirlos a SIMOCODE-DP. SIMOCODE-DP. Parmetro registro Este registro de parmetros tambin est disponible en el software Win-SIMOCODEDP/Professional y Win-SIMOCODE-DP/Smart en la carpeta de ejemplos bajo el nombre de "ENGEXA.smc". La siguiente lista muestra slo los parmetros que difieren de los valores por defecto. La tabla completa de los parmetros que contiene los valores por defecto se muestran en la pgina E-3.
Potrebbero piacerti anche
- Manual Operacion Roclink PDFDocumento40 pagineManual Operacion Roclink PDFEder Alonso Cardenas Cepeda100% (1)
- Entradas y Salidas de Un PLCDocumento6 pagineEntradas y Salidas de Un PLCJosue DomínguezNessuna valutazione finora
- Powermanager SIEMENSDocumento7 paginePowermanager SIEMENSjarolNessuna valutazione finora
- Curso General Automata Programable OmronDocumento96 pagineCurso General Automata Programable OmronJavi Cascant100% (1)
- Rec3924Spanish PDFDocumento98 pagineRec3924Spanish PDFcustodio perezNessuna valutazione finora
- Unidades Remotas de TelemetriaDocumento34 pagineUnidades Remotas de TelemetriaPolChris ChasiNessuna valutazione finora
- Manual Módem Huawei E5172Documento7 pagineManual Módem Huawei E5172Eyder Alexander RodriguezNessuna valutazione finora
- VTWIN Hardware ManualDocumento946 pagineVTWIN Hardware ManualnaceurmaNessuna valutazione finora
- Arduino UNO R3Documento15 pagineArduino UNO R3JulioNessuna valutazione finora
- Profibus PDFDocumento38 pagineProfibus PDFBladimir VargasNessuna valutazione finora
- Caipe Transmisor Celda PesajeDocumento3 pagineCaipe Transmisor Celda PesajeperriweNessuna valutazione finora
- Variador LenzeDocumento36 pagineVariador LenzeMiguel Angel Gomez Cubillos0% (1)
- Informe Certamen 2Documento29 pagineInforme Certamen 2Jhon Esteban Rodriguez RuizNessuna valutazione finora
- MCG 1600 Transmisor de Nivel Tipo RadarDocumento5 pagineMCG 1600 Transmisor de Nivel Tipo RadarDanny SánchezNessuna valutazione finora
- Calculo, Diseño y Requerimientos de Desempeño de Cables Opticos Opgw para Operación Confiable Del Sistema de Transmision Digital en Redes de 500KVDocumento10 pagineCalculo, Diseño y Requerimientos de Desempeño de Cables Opticos Opgw para Operación Confiable Del Sistema de Transmision Digital en Redes de 500KVCarlos Alberto Di PalmaNessuna valutazione finora
- Fallas de PLC PDFDocumento1 paginaFallas de PLC PDFedwinmenaNessuna valutazione finora
- Ipc LjeDocumento85 pagineIpc LjeEdiriosNessuna valutazione finora
- Guia Redes IndustrialesDocumento18 pagineGuia Redes IndustrialesesbanNessuna valutazione finora
- Como Implementar Pantallas Con IFixDocumento15 pagineComo Implementar Pantallas Con IFixCarlos Ruiz DiazNessuna valutazione finora
- Telegrama de Datos Del Bus de Datos CANDocumento1 paginaTelegrama de Datos Del Bus de Datos CANBili Javier CaceresNessuna valutazione finora
- Contador de Revoluciones Digital Antiguo para DieselDocumento3 pagineContador de Revoluciones Digital Antiguo para Dieseldarkking00Nessuna valutazione finora
- 1 Generalidades CAN VAN E CitroenDocumento15 pagine1 Generalidades CAN VAN E CitroenjonathanNessuna valutazione finora
- Manual TwidoDocumento131 pagineManual TwidoPablo VargasNessuna valutazione finora
- Termistor - TermorresistenciaDocumento36 pagineTermistor - TermorresistenciadanielaNessuna valutazione finora
- Manual Medidor Q1K EspañolDocumento271 pagineManual Medidor Q1K Españolapi-27293273100% (2)
- Resistores MELFDocumento4 pagineResistores MELFPedro CmNessuna valutazione finora
- Ecus Mod 1Documento4 pagineEcus Mod 1Oswaldo AguilarNessuna valutazione finora
- Systemhandbuch SIMOCODE Pro Es-MXDocumento412 pagineSystemhandbuch SIMOCODE Pro Es-MXbonillaaa07Nessuna valutazione finora
- 1093 Espanol Reloj GpsDocumento4 pagine1093 Espanol Reloj GpsDavid A. D'LimaNessuna valutazione finora
- FatekDocumento5 pagineFatekJose OrtegaNessuna valutazione finora
- XC-12 Diagrama y FallasDocumento18 pagineXC-12 Diagrama y FallasFernandoSanchezNessuna valutazione finora
- Periferia Descentralizada Et200Documento36 paginePeriferia Descentralizada Et200simon107Nessuna valutazione finora
- Funcionamiento FB41Documento16 pagineFuncionamiento FB41jaimeasisaNessuna valutazione finora
- Componentes de Un PLCDocumento6 pagineComponentes de Un PLCGeorge Ramos100% (2)
- Manual Soft Starter 3rw44 SiemensDocumento255 pagineManual Soft Starter 3rw44 SiemensAle Maria100% (1)
- Conexión USS Variador de Velocidad MM4 y SINAMICSDocumento9 pagineConexión USS Variador de Velocidad MM4 y SINAMICScmejia7857Nessuna valutazione finora
- Manual de Instrucciones: para ElDocumento388 pagineManual de Instrucciones: para ElEddy CatúNessuna valutazione finora
- Colores de Cables para Atego 1628-FusionadoDocumento4 pagineColores de Cables para Atego 1628-FusionadoEstefany Maria Espinoza Campos0% (1)
- Guia de Usuario de Variadores Optidrive p2 v1.12Documento52 pagineGuia de Usuario de Variadores Optidrive p2 v1.12Eduardo Molina PerezNessuna valutazione finora
- ATS22 User Manual SP BBV51332 03 PDFDocumento89 pagineATS22 User Manual SP BBV51332 03 PDFGilman Robert MontalvoNessuna valutazione finora
- Diagnostico Lógica CableadaDocumento10 pagineDiagnostico Lógica Cableadajuliogomez29Nessuna valutazione finora
- WEG Controle de Parada de Emergencia Cpa D 10002375181 Manual EsDocumento2 pagineWEG Controle de Parada de Emergencia Cpa D 10002375181 Manual EsMarcelho CaetanoNessuna valutazione finora
- Calibración de Transmisores Paso A PasoDocumento4 pagineCalibración de Transmisores Paso A PasoGiovanni LerasNessuna valutazione finora
- DVP06XA-S en EsDocumento2 pagineDVP06XA-S en Esalexander corderoNessuna valutazione finora
- NC 100 EspanolDocumento48 pagineNC 100 EspanolEsteban Fuentes Elevator Pitch100% (1)
- El PLC IdealDocumento39 pagineEl PLC IdealOscar TorresNessuna valutazione finora
- Ciclo de Scan Del ProcesadorDocumento9 pagineCiclo de Scan Del ProcesadorJoselyn Rosario SincheNessuna valutazione finora
- CL PDFDocumento19 pagineCL PDFkariannacetaNessuna valutazione finora
- Transmisor Modelo 2700 Con Foundation Fieldbus Manual de Configuración y Uso Foundation Fieldbus Configuration Manual Spanish Es 62710 PDFDocumento252 pagineTransmisor Modelo 2700 Con Foundation Fieldbus Manual de Configuración y Uso Foundation Fieldbus Configuration Manual Spanish Es 62710 PDFHenry PorcoNessuna valutazione finora
- Manual DanfossDocumento238 pagineManual DanfossGeorgeMarrinesNessuna valutazione finora
- Redes Pon - Jorge RiveraDocumento17 pagineRedes Pon - Jorge Riverawassup2Nessuna valutazione finora
- Especificaciones Protocolo Modbus EspanolDocumento60 pagineEspecificaciones Protocolo Modbus EspanolChristian Joel Becerra JiménezNessuna valutazione finora
- Spanish Elite Rev GDocumento85 pagineSpanish Elite Rev GJose EspinaqueNessuna valutazione finora
- Automatizacion Con PLCDocumento24 pagineAutomatizacion Con PLCArturo CaballeroNessuna valutazione finora
- S7-300 Input ModulesDocumento566 pagineS7-300 Input ModulesVladimir Aliro Quezada CidNessuna valutazione finora
- Reporte de Practica PLCDocumento7 pagineReporte de Practica PLCGerman Rodriguez100% (1)
- Datakom DKG 309 EspañolDocumento61 pagineDatakom DKG 309 EspañolAntonio MartinNessuna valutazione finora
- Autómatas ProgramablesDocumento12 pagineAutómatas Programableslupita sernaNessuna valutazione finora
- Segundo Reporte de Trabajo PLCDocumento59 pagineSegundo Reporte de Trabajo PLCFabian AlfonsoNessuna valutazione finora
- Energia Solar Refrigeracion DomesticaDocumento4 pagineEnergia Solar Refrigeracion DomesticaaamesmNessuna valutazione finora
- HDS PolipropilenoDocumento4 pagineHDS PolipropilenoIván Guzmán FloresNessuna valutazione finora
- IntroducciónDocumento41 pagineIntroducciónIván Guzmán FloresNessuna valutazione finora
- Guia - Aprendizaje - S7300 - N 1 - Nivel BasicoDocumento26 pagineGuia - Aprendizaje - S7300 - N 1 - Nivel BasicoIván Guzmán FloresNessuna valutazione finora