Potrebbero piacerti anche
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Theory and Applications of Power System BlocksetDocumento6 pagineTheory and Applications of Power System BlocksetYusufANessuna valutazione finora
- Improved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsDocumento6 pagineImproved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsPhanikumar Bellam KondaNessuna valutazione finora
- Dynamic Modeling of Complex System Using PSSEDocumento9 pagineDynamic Modeling of Complex System Using PSSE08DhanushkaNessuna valutazione finora
- Distinctive Study of UPFC and Fault Analysis Under Simulated EnvironmentDocumento5 pagineDistinctive Study of UPFC and Fault Analysis Under Simulated EnvironmentXahid YousafNessuna valutazione finora
- Unbalanced Three-Phase Distribution SystemDocumento5 pagineUnbalanced Three-Phase Distribution SystemIraj Az IraniNessuna valutazione finora
- 10 Chapter 4 MM StabilityDocumento5 pagine10 Chapter 4 MM Stabilityashwin_05_kumarNessuna valutazione finora
- Application of Multiple-Model Adaptive ControlDocumento10 pagineApplication of Multiple-Model Adaptive ControlRabbuni GangavarapuNessuna valutazione finora
- 0291 Icnsc231Documento6 pagine0291 Icnsc231Karthik Annamalai N RNessuna valutazione finora
- Power System Restoration WithDocumento5 paginePower System Restoration WithSandhya ShyamasundarNessuna valutazione finora
- Analysis of Neural and Fuzzy-Power Electronic ControlDocumento9 pagineAnalysis of Neural and Fuzzy-Power Electronic ControlVisu TamilNessuna valutazione finora
- Integrated Modeling of An Electro-Hydraulic Servo Manipulator Using Linear GraphsDocumento1 paginaIntegrated Modeling of An Electro-Hydraulic Servo Manipulator Using Linear GraphsazetromNessuna valutazione finora
- VenkataramananDocumento260 pagineVenkataramananleoh1223Nessuna valutazione finora
- Simulation of Electric Machinery and Power Electronics InterfacingDocumento6 pagineSimulation of Electric Machinery and Power Electronics Interfacingadilo7780Nessuna valutazione finora
- Upfc PDFDocumento5 pagineUpfc PDFHarish KumarNessuna valutazione finora
- Improvement by Voltage Profile by Static Var Compensators in Distribution SubstationDocumento4 pagineImprovement by Voltage Profile by Static Var Compensators in Distribution SubstationJoe RanteNessuna valutazione finora
- Harmonic Ananlysis in HVDCDocumento7 pagineHarmonic Ananlysis in HVDCkrishnamohan143Nessuna valutazione finora
- EE2351Documento27 pagineEE2351Anonymous TJRX7C100% (1)
- The Feedforward Control of Mechatronic System With Backlash: Arab.M Lachouri.ADocumento7 pagineThe Feedforward Control of Mechatronic System With Backlash: Arab.M Lachouri.AZellagui EnergyNessuna valutazione finora
- Multi Objective 11Documento10 pagineMulti Objective 11ragvshahNessuna valutazione finora
- Veac Ja ReportDocumento99 pagineVeac Ja ReportPraveen KumarNessuna valutazione finora
- Power System Stabilizers As Undergraduate Control Design ProjectsDocumento8 paginePower System Stabilizers As Undergraduate Control Design Projectsabhikirk99Nessuna valutazione finora
- PSSEDocumento6 paginePSSESyed Faizan AliNessuna valutazione finora
- System-Response-Based Eigenvalue Estimation For On-Line Assessment of Power System StabilityDocumento6 pagineSystem-Response-Based Eigenvalue Estimation For On-Line Assessment of Power System Stabilityapi-3697505Nessuna valutazione finora
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocumento8 pagineUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuNessuna valutazione finora
- 2 Symposium On Lift and Escalator TechnologiesDocumento12 pagine2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNessuna valutazione finora
- A Case Study of Load Flow and Optimal Load Flow Analysis On 400 KV Sub-Station SojaDocumento5 pagineA Case Study of Load Flow and Optimal Load Flow Analysis On 400 KV Sub-Station SojaJoe RanteNessuna valutazione finora
- Review of Reactive Power Compensation TechnologiesDocumento79 pagineReview of Reactive Power Compensation TechnologiesRadu BabauNessuna valutazione finora
- International Journal of Engineering Research and DevelopmentDocumento9 pagineInternational Journal of Engineering Research and DevelopmentIJERDNessuna valutazione finora
- A Particle-Swarm-Based Approach of Power System Stability Enhancement With Unified Power Ow ControllerDocumento9 pagineA Particle-Swarm-Based Approach of Power System Stability Enhancement With Unified Power Ow ControllerMmillion AlemayehuNessuna valutazione finora
- Mathematical Models: Module - 2Documento13 pagineMathematical Models: Module - 2Rajath UpadhyaNessuna valutazione finora
- 01 - Electrical Power SystemDocumento72 pagine01 - Electrical Power SystemAbi VNessuna valutazione finora
- Power System Analysis Lecture NotesDocumento134 paginePower System Analysis Lecture NotesHyma GelliNessuna valutazione finora
- c06d PDFDocumento7 paginec06d PDFVishal DibyaNessuna valutazione finora
- A New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterDocumento8 pagineA New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterVenktesh MishraNessuna valutazione finora
- Chapter 2 CAPS PDFDocumento21 pagineChapter 2 CAPS PDFZedo ZedoNessuna valutazione finora
- Modelling and Control of An Electromechanical SteeringDocumento11 pagineModelling and Control of An Electromechanical Steeringrency gil engoNessuna valutazione finora
- EE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignDocumento4 pagineEE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignAbdalla FathyNessuna valutazione finora
- Active Suspension System Energy Control 2009 IFAC Proceedings VolumesDocumento7 pagineActive Suspension System Energy Control 2009 IFAC Proceedings VolumesKeneni AlemayehuNessuna valutazione finora
- EE-401 - Power Flow Analysis - PPTDocumento80 pagineEE-401 - Power Flow Analysis - PPTpushpak chandra sekharNessuna valutazione finora
- 1996 An Extended Ward Equivalent Approach For Power System Security Assessment (Elsv) PDFDocumento8 pagine1996 An Extended Ward Equivalent Approach For Power System Security Assessment (Elsv) PDFali_alfaNessuna valutazione finora
- Eee-Vi-power System Analysis and Stability (10ee61) - NotesDocumento119 pagineEee-Vi-power System Analysis and Stability (10ee61) - NotesNurul Islam Faruk0% (1)
- C 3 PDFDocumento7 pagineC 3 PDFAmanda HayesNessuna valutazione finora
- Investigation of Wind Farm On Power System Voltage Stability Based On Bifurcation TheoryDocumento4 pagineInvestigation of Wind Farm On Power System Voltage Stability Based On Bifurcation TheoryArmando MaloneNessuna valutazione finora
- Power System Analysis NotesDocumento186 paginePower System Analysis Notesshishir jhaNessuna valutazione finora
- Eee-Vi-Power System Analysis and Stability (10ee61) - Notes PDFDocumento119 pagineEee-Vi-Power System Analysis and Stability (10ee61) - Notes PDFLatisha CarterNessuna valutazione finora
- 01234706Documento7 pagine01234706memotronikNessuna valutazione finora
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- STATCOM Control For Power System Voltage Control ApplicationsDocumento7 pagineSTATCOM Control For Power System Voltage Control ApplicationssirageldeenNessuna valutazione finora
- RBF BP JieeecDocumento5 pagineRBF BP JieeecEyad A. FeilatNessuna valutazione finora
- Power Systems-III Ditital NotesDocumento102 paginePower Systems-III Ditital NotesSimranNessuna valutazione finora
- Comparison of Three Phase Shunt Active Power Filter AlgorithmsDocumento6 pagineComparison of Three Phase Shunt Active Power Filter AlgorithmsAhmed HelmyNessuna valutazione finora
- Simulation of IEEE First Benchmark Model For SSR StudiesDocumento4 pagineSimulation of IEEE First Benchmark Model For SSR StudiesPabloNalogowskiNessuna valutazione finora
- Matlab-Based Voltage Stability Analysis Toolbox and Its Validity CheckDocumento5 pagineMatlab-Based Voltage Stability Analysis Toolbox and Its Validity Checkwvargas926Nessuna valutazione finora
- Design and Development of Three Phase Shunt Active Filter With Balanced and Unbalanced SupplyDocumento18 pagineDesign and Development of Three Phase Shunt Active Filter With Balanced and Unbalanced SupplyKush DewanganNessuna valutazione finora
- Proceedings of The Institution of Mechanical Engineers - Part I - Journal of Systems and Control Engineering-2002-Buisson-47-63Documento18 pagineProceedings of The Institution of Mechanical Engineers - Part I - Journal of Systems and Control Engineering-2002-Buisson-47-63Mustikaning Sekar AnindyajatiNessuna valutazione finora
- Simulation of Synchronous Machine in Stability Study For Power SystemDocumento6 pagineSimulation of Synchronous Machine in Stability Study For Power SystemZawmin TunNessuna valutazione finora
- Dynamic Model For Power Systems With Multiple FACTS ControllersDocumento11 pagineDynamic Model For Power Systems With Multiple FACTS ControllersSyed Wajahat AliNessuna valutazione finora
- Dissipativity Properties of Detailed Models of Synchronous GeneratorsDocumento6 pagineDissipativity Properties of Detailed Models of Synchronous Generatorssridhar_n@email.comNessuna valutazione finora
- Harmonic Reduction of Arc Furnaces Using D-Statcom: S.Pushpavalli, A. CordeliasumathyDocumento8 pagineHarmonic Reduction of Arc Furnaces Using D-Statcom: S.Pushpavalli, A. CordeliasumathyIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- A Local WBC System Operating Across A University CampusDocumento7 pagineA Local WBC System Operating Across A University CampusCyberJournals MultidisciplinaryNessuna valutazione finora
- A Digitally Controlled Low Voltage Variable Gain Amplifier With Constant Return LossDocumento7 pagineA Digitally Controlled Low Voltage Variable Gain Amplifier With Constant Return LossCyberJournals MultidisciplinaryNessuna valutazione finora
- Fast Block Direction Prediction For Directional TransformsDocumento8 pagineFast Block Direction Prediction For Directional TransformsCyberJournals MultidisciplinaryNessuna valutazione finora
- Relaying Schemes For Improving Coverage and Capacity in Cellular System With Selectable User EquipmentDocumento8 pagineRelaying Schemes For Improving Coverage and Capacity in Cellular System With Selectable User EquipmentCyberJournals MultidisciplinaryNessuna valutazione finora
- Exploration of Co-Relation Between Depression and Anaemia in Pregnant Women Using Knowledge Discovery and Data Mining Algorithms and ToolsDocumento9 pagineExploration of Co-Relation Between Depression and Anaemia in Pregnant Women Using Knowledge Discovery and Data Mining Algorithms and ToolsCyberJournals MultidisciplinaryNessuna valutazione finora
- Prototype of 5.8 GHZ Wireless Power Transmission System For Electric Vehicle SystemDocumento5 paginePrototype of 5.8 GHZ Wireless Power Transmission System For Electric Vehicle SystemCyberJournals MultidisciplinaryNessuna valutazione finora
- Modified Log Domain Decoding Algorithm For LDPC Codes Over GF (Q)Documento7 pagineModified Log Domain Decoding Algorithm For LDPC Codes Over GF (Q)CyberJournals MultidisciplinaryNessuna valutazione finora
- Nuclear Power-An Inevitable Option For Most Vulnerable Countries From The Perspective of Environmental DegradationDocumento6 pagineNuclear Power-An Inevitable Option For Most Vulnerable Countries From The Perspective of Environmental DegradationCyberJournals MultidisciplinaryNessuna valutazione finora
- Inspection of The Interior Surface of A Cylindrical Pipe by Omnidirectional Image Acquisition SystemDocumento6 pagineInspection of The Interior Surface of A Cylindrical Pipe by Omnidirectional Image Acquisition SystemCyberJournals MultidisciplinaryNessuna valutazione finora
- Simulations For Time Delay Compensation in Networked Control SystemsDocumento7 pagineSimulations For Time Delay Compensation in Networked Control SystemsCyberJournals MultidisciplinaryNessuna valutazione finora
- Artemisa: Using An Android Device As An Eco-Driving AssistantDocumento8 pagineArtemisa: Using An Android Device As An Eco-Driving AssistantCyberJournals MultidisciplinaryNessuna valutazione finora
- Performance Evaluation of Stochastic Algorithms For Linear Antenna Arrays Synthesis Under Constrained ConditionsDocumento7 paginePerformance Evaluation of Stochastic Algorithms For Linear Antenna Arrays Synthesis Under Constrained ConditionsCyberJournals MultidisciplinaryNessuna valutazione finora
- Computing The Configuration Space On Reconfiguration Mesh MultiprocessorsDocumento8 pagineComputing The Configuration Space On Reconfiguration Mesh MultiprocessorsCyberJournals MultidisciplinaryNessuna valutazione finora
- Performance of Hybrid Pump-Wavelength Configurations For Optical Packet Switch With Parametric Wavelength ConvertersDocumento8 paginePerformance of Hybrid Pump-Wavelength Configurations For Optical Packet Switch With Parametric Wavelength ConvertersCyberJournals MultidisciplinaryNessuna valutazione finora
- Simulations For WDM Mesh Networks With Visual BasicDocumento7 pagineSimulations For WDM Mesh Networks With Visual BasicCyberJournals MultidisciplinaryNessuna valutazione finora
- A Novel Adaptive Resource Allocation Scheme With QoS Support in Mobile WiMAX Release 2 Wireless NetworksDocumento8 pagineA Novel Adaptive Resource Allocation Scheme With QoS Support in Mobile WiMAX Release 2 Wireless NetworksCyberJournals MultidisciplinaryNessuna valutazione finora
- A Scheme To Monitor Maximum Link Load With Load RankingDocumento7 pagineA Scheme To Monitor Maximum Link Load With Load RankingCyberJournals MultidisciplinaryNessuna valutazione finora
- An Efficient MODEL For Detecting LEARNING STYLE Preferences in A Personalized E-Learning Management SystemDocumento8 pagineAn Efficient MODEL For Detecting LEARNING STYLE Preferences in A Personalized E-Learning Management SystemCyberJournals MultidisciplinaryNessuna valutazione finora
- An Improved Shock Graph For An Improved Object RecognitionDocumento8 pagineAn Improved Shock Graph For An Improved Object RecognitionCyberJournals MultidisciplinaryNessuna valutazione finora
- An Overview of Technical and Economical Feasibility of Retrofitted MHD Power Plants From The Perspective of BangladeshDocumento5 pagineAn Overview of Technical and Economical Feasibility of Retrofitted MHD Power Plants From The Perspective of BangladeshCyberJournals MultidisciplinaryNessuna valutazione finora
- Investigation On The Performance of Linear Antenna Array Synthesis Using Genetic AlgorithmDocumento7 pagineInvestigation On The Performance of Linear Antenna Array Synthesis Using Genetic AlgorithmCyberJournals MultidisciplinaryNessuna valutazione finora
- Relay Network Extension On Wireless Access Links (ReNEWAL) of High Rate Packet Data (HRPD)Documento11 pagineRelay Network Extension On Wireless Access Links (ReNEWAL) of High Rate Packet Data (HRPD)CyberJournals MultidisciplinaryNessuna valutazione finora
- Throughput Performance Enhancement For MUDiv/OFDMA Using MMSE Equalization Without Guard IntervalDocumento7 pagineThroughput Performance Enhancement For MUDiv/OFDMA Using MMSE Equalization Without Guard IntervalCyberJournals MultidisciplinaryNessuna valutazione finora
- A Hybrid Scheme With Impressive QoS Over Telecommunication NetworksDocumento7 pagineA Hybrid Scheme With Impressive QoS Over Telecommunication NetworksCyberJournals MultidisciplinaryNessuna valutazione finora
- Performance Estimation of Novel 32-Bit and 64-Bit RISC Based Network Processor CoresDocumento13 paginePerformance Estimation of Novel 32-Bit and 64-Bit RISC Based Network Processor CoresCyberJournals MultidisciplinaryNessuna valutazione finora
- On-Demand Multicast Slot Allocation Scheme For Active Optical Access Network Using PLZT High-Speed Optical SwitchesDocumento9 pagineOn-Demand Multicast Slot Allocation Scheme For Active Optical Access Network Using PLZT High-Speed Optical SwitchesCyberJournals MultidisciplinaryNessuna valutazione finora
- Cycle Analysis in Expanded QC LDPC CodesDocumento6 pagineCycle Analysis in Expanded QC LDPC CodesCyberJournals MultidisciplinaryNessuna valutazione finora
- A Feature Extraction Method and Recognition Algorithm For Detection Unknown Worm and Variations Based On Static FeaturesDocumento7 pagineA Feature Extraction Method and Recognition Algorithm For Detection Unknown Worm and Variations Based On Static FeaturesCyberJournals MultidisciplinaryNessuna valutazione finora
- Analysis of The Latest Trends in Mobile Commerce Using The NFC TechnologyDocumento12 pagineAnalysis of The Latest Trends in Mobile Commerce Using The NFC TechnologyCyberJournals Multidisciplinary100% (1)
- Unit 3 Z BusDocumento5 pagineUnit 3 Z BusJJ KNessuna valutazione finora
- PLCDocumento56 paginePLCFelix Lee Kah NgieNessuna valutazione finora
- Sistem Minimum At89s51Documento9 pagineSistem Minimum At89s51Blize_Sans_8370Nessuna valutazione finora
- Ach400 00Documento151 pagineAch400 00João PauloNessuna valutazione finora
- ECE 3413 Practice TestDocumento11 pagineECE 3413 Practice TestBlake NelsonNessuna valutazione finora
- Projects Type FormatDocumento10 pagineProjects Type FormatBryan AvilaNessuna valutazione finora
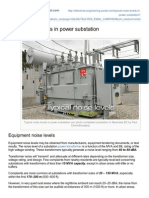
- Typical Noise Levels in Power SubstationDocumento2 pagineTypical Noise Levels in Power SubstationRobert GalarzaNessuna valutazione finora
- Electrical Substation Interlock System-2Documento24 pagineElectrical Substation Interlock System-2yassir zyadahNessuna valutazione finora
- AX8 Owners Manual PDFDocumento111 pagineAX8 Owners Manual PDFSoe SirawitNessuna valutazione finora
- Thesis Topics On Power System ProtectionDocumento8 pagineThesis Topics On Power System ProtectionRichard Hogue100% (2)
- Circuit BreakerDocumento23 pagineCircuit BreakerCedrick100% (2)
- Standard Select - 10 Standards V2.0Documento2 pagineStandard Select - 10 Standards V2.0JP OrbigoNessuna valutazione finora
- Allen & O'Brien - Electrical Resources - Conversion Tables - Reference Charts - Mathematical FormulaeDocumento5 pagineAllen & O'Brien - Electrical Resources - Conversion Tables - Reference Charts - Mathematical Formulaeduuk73Nessuna valutazione finora
- Ee2304 Power Electronics Lab ManualDocumento49 pagineEe2304 Power Electronics Lab ManualSree GaneshNessuna valutazione finora
- L577-User Manual For Hardware PDFDocumento30 pagineL577-User Manual For Hardware PDFLe Chi PhamNessuna valutazione finora
- Xerox Phaser+7400+Options+Parts+Service+ManualDocumento1.102 pagineXerox Phaser+7400+Options+Parts+Service+ManualMarshall Holzderber100% (1)
- High Voltage Transient AnalysisDocumento11 pagineHigh Voltage Transient AnalysiskasunchamaraNessuna valutazione finora
- Basic Electrical Engineering Practice ProblemsDocumento26 pagineBasic Electrical Engineering Practice ProblemsChris Thel May60% (5)
- Broadband Dual-Polarized Aperture-Coupled Patch Antenna For 5G ApplicationsDocumento8 pagineBroadband Dual-Polarized Aperture-Coupled Patch Antenna For 5G ApplicationsIJRASETPublicationsNessuna valutazione finora
- ZVP2110A ZVP2110C: P-Channel Enhancement Mode Vertical Dmos Fet P-Channel Enhancement Mode Vertical Dmos FetDocumento3 pagineZVP2110A ZVP2110C: P-Channel Enhancement Mode Vertical Dmos Fet P-Channel Enhancement Mode Vertical Dmos Fet19aldo97Nessuna valutazione finora
- DTMF Door LockingDocumento43 pagineDTMF Door LockingBasheer T MNessuna valutazione finora
- Annex 2 - Delivery Format - Task 2Documento13 pagineAnnex 2 - Delivery Format - Task 2david giraldo lopezNessuna valutazione finora
- Non-Uniform and Frequency-Dependent CharacteristicsDocumento12 pagineNon-Uniform and Frequency-Dependent CharacteristicsJosNessuna valutazione finora
- High Voltage Unit 5Documento18 pagineHigh Voltage Unit 5smrutishree swainNessuna valutazione finora
- TBE ElectricalDocumento1 paginaTBE ElectricalJohn Philip BuntalesNessuna valutazione finora
- Important NumericalsDocumento1 paginaImportant NumericalscheshankarNessuna valutazione finora
- Step Response Unit ResponseDocumento6 pagineStep Response Unit ResponsetirsollantadaNessuna valutazione finora
- Electrical DataDocumento43 pagineElectrical DataSidra QasimNessuna valutazione finora
- Pioneer PL 500X Service ManualDocumento22 paginePioneer PL 500X Service ManualAngel Luciano Ramon Gomez100% (1)