Potrebbero piacerti anche
- Stability Book Skate 1 MetricDocumento69 pagineStability Book Skate 1 MetricEvan HardyNessuna valutazione finora
- Advanced Logic Synthesis: Multiple Choice QuestionsDocumento16 pagineAdvanced Logic Synthesis: Multiple Choice QuestionsmanojkumarNessuna valutazione finora
- Schottel: For The Shipping World Steering A Tractor TugDocumento4 pagineSchottel: For The Shipping World Steering A Tractor TuglacothNessuna valutazione finora
- Towing Solutions IncDocumento6 pagineTowing Solutions Incboca1966100% (1)
- Dictionary For Marine EngineeringDocumento755 pagineDictionary For Marine EngineeringandevariNessuna valutazione finora
- Load Line 1966-88Documento4 pagineLoad Line 1966-88Polaris Bridgeman100% (1)
- DanPilot Pilotage Pre-Planning GuideDocumento108 pagineDanPilot Pilotage Pre-Planning Guideokandandin100% (2)
- Sunfix Blue SPRDocumento7 pagineSunfix Blue SPRDyeing 2 Wintex100% (2)
- CST STUDIO SUITE - High Frequency Simulation PDFDocumento128 pagineCST STUDIO SUITE - High Frequency Simulation PDFGenik Podunay100% (2)
- Wps Gtaw Monel b127 b164Documento2 pagineWps Gtaw Monel b127 b164Srinivasan Muruganantham67% (3)
- B23-20 - Appendix A - TERMPOL TDR - Maneuvering Study of Escorted Tankers Part 2 Main Report (FORCE Technology) A1Z6K4 PDFDocumento10 pagineB23-20 - Appendix A - TERMPOL TDR - Maneuvering Study of Escorted Tankers Part 2 Main Report (FORCE Technology) A1Z6K4 PDFRosimon MidjajaNessuna valutazione finora
- Tug Girting: AssessmentDocumento31 pagineTug Girting: AssessmentOrlando QuevedoNessuna valutazione finora
- Maneouvering Booklet SampleDocumento42 pagineManeouvering Booklet SampleEmrah Yesiltas100% (2)
- 8 GOOD Interaction of Tug ShipDocumento2 pagine8 GOOD Interaction of Tug ShipndesigngmailNessuna valutazione finora
- Ship Geometry - IDocumento39 pagineShip Geometry - Isunnyasrahul raj100% (1)
- 01a-3.3.2 - TugsDocumento21 pagine01a-3.3.2 - TugsRajiv VigNessuna valutazione finora
- Ship Handling: Prepared by Capt. P.C.Biswas Faculty, SEIET KolkataDocumento23 pagineShip Handling: Prepared by Capt. P.C.Biswas Faculty, SEIET KolkataJAGJIT SINGHNessuna valutazione finora
- Ship S Pivot PointDocumento41 pagineShip S Pivot Pointbehzad parsi100% (1)
- IMU ManoeuvringDocumento75 pagineIMU ManoeuvringzaheerbcNessuna valutazione finora
- MGN 0018 - Dangers of InteractionDocumento4 pagineMGN 0018 - Dangers of InteractiontonyNessuna valutazione finora
- Towage Information: The Mersey Docks and Harbour Company LimitedDocumento8 pagineTowage Information: The Mersey Docks and Harbour Company LimitedIsaacNarendraAkbarNessuna valutazione finora
- Tug ProceduresReportDocumento40 pagineTug ProceduresReportenglisgoNessuna valutazione finora
- Structural Damage On Unloading: Hatch Coamings and CoversDocumento194 pagineStructural Damage On Unloading: Hatch Coamings and Coversjosecarlos180177100% (2)
- Mandatory Emergency Towing Systems in Ships Other Than Tankers of Not Less Than 20,000 DWTDocumento6 pagineMandatory Emergency Towing Systems in Ships Other Than Tankers of Not Less Than 20,000 DWTnawanNessuna valutazione finora
- Its27 Twin Fin ConceptDocumento10 pagineIts27 Twin Fin ConceptmitsosNessuna valutazione finora
- 6.6 Interaction Between A Hull & A Propeller: in Which The Propeller Is Working? (Later We Will Also Study TheDocumento31 pagine6.6 Interaction Between A Hull & A Propeller: in Which The Propeller Is Working? (Later We Will Also Study Thebehzad parsiNessuna valutazione finora
- Characteristics of PropellerDocumento46 pagineCharacteristics of PropellerBishop TariganNessuna valutazione finora
- New Edition of Admiralty Mariners Handbook Np100Documento1 paginaNew Edition of Admiralty Mariners Handbook Np100Di DiNessuna valutazione finora
- What Is Deck Water Seal On Tanker and Its Types in DetailDocumento5 pagineWhat Is Deck Water Seal On Tanker and Its Types in DetailRose AriantiNessuna valutazione finora
- What Is Probabilistic and Deterministic Approach For Calculating Damage Stability - Information To Be Included in The Trim and Stability BookletDocumento6 pagineWhat Is Probabilistic and Deterministic Approach For Calculating Damage Stability - Information To Be Included in The Trim and Stability BookletAim NavalNessuna valutazione finora
- Phase 2 Paper Nav Arch - 2Documento8 paginePhase 2 Paper Nav Arch - 2Thapliyal SanjayNessuna valutazione finora
- Effect of Shift of Cargo On StabilityDocumento4 pagineEffect of Shift of Cargo On StabilityMahdi Bordbar100% (1)
- Stability StandardDocumento78 pagineStability StandardJORGE ARTURO TORIBIO HUERTANessuna valutazione finora
- Wheel Over Position CalculationDocumento3 pagineWheel Over Position CalculationSherwin Delfin CincoNessuna valutazione finora
- 810 e G 1861 e Designer Manual 2010-03-26Documento12 pagine810 e G 1861 e Designer Manual 2010-03-26Chahbi Ramzi100% (1)
- Anchor Handling (K.Mamondole 2009) PDFDocumento213 pagineAnchor Handling (K.Mamondole 2009) PDFSergey Vasilievich ChetverichenkoNessuna valutazione finora
- Bollard Pull Standard JIP PDFDocumento2 pagineBollard Pull Standard JIP PDFRahmat AnpsNessuna valutazione finora
- Why Initial Met Height at 1 RadianDocumento9 pagineWhy Initial Met Height at 1 RadianRanjeet SinghNessuna valutazione finora
- Types of Rudders Used For ShipsDocumento8 pagineTypes of Rudders Used For Shipsนัทเดช เรืองสวนNessuna valutazione finora
- Naval Shiphandling - Cap2 PDFDocumento27 pagineNaval Shiphandling - Cap2 PDFCleyton LeiteNessuna valutazione finora
- Transverse Stability of ShipDocumento12 pagineTransverse Stability of ShipIrakli ShavishviliNessuna valutazione finora
- Handling Ship in Rivers and Retricted WaterDocumento25 pagineHandling Ship in Rivers and Retricted WaterRoken Zgoul100% (1)
- Chief Mate Study at BlackpoolDocumento2 pagineChief Mate Study at BlackpoolPJGNessuna valutazione finora
- Ship To Ship InteractionDocumento15 pagineShip To Ship InteractionGlen MacNessuna valutazione finora
- 02.07 Chapter 7 Resistance and Powering of ShipsDocumento46 pagine02.07 Chapter 7 Resistance and Powering of ShipschavdarNessuna valutazione finora
- 15 Precise PilotingDocumento32 pagine15 Precise PilotingErnestoDom100% (3)
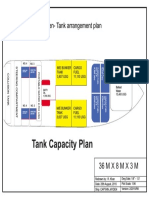
- Tank Capacity PlanDocumento1 paginaTank Capacity PlanAnonymous ycFeyuLAtNessuna valutazione finora
- Ahts Stability 130926173935 Phpapp01 PDFDocumento30 pagineAhts Stability 130926173935 Phpapp01 PDFJl RuMbOsNessuna valutazione finora
- ResumoDocumento78 pagineResumoMarco Antonio Toscano100% (2)
- Aizimuth Tug BoatDocumento3 pagineAizimuth Tug BoatTuan Dao QuangNessuna valutazione finora
- The Stability Book: DisplacementDocumento5 pagineThe Stability Book: DisplacementAsif Siddiqui100% (1)
- Rudder ConstructionDocumento54 pagineRudder ConstructionAnkur Sharma100% (1)
- 2 - Estimation of General Characteristics of Fishing Vessels BDocumento18 pagine2 - Estimation of General Characteristics of Fishing Vessels BJuan SilvaNessuna valutazione finora
- Ship S Pivot PointDocumento41 pagineShip S Pivot Pointbehzad parsiNessuna valutazione finora
- Sea Keeping Analysis For Preliminary DesignDocumento10 pagineSea Keeping Analysis For Preliminary DesignTullio OpattiNessuna valutazione finora
- Part W Navigation Bridge VisibilityDocumento9 paginePart W Navigation Bridge VisibilityDian Nafi' AhmadNessuna valutazione finora
- Navigation SQADocumento13 pagineNavigation SQACherian KuttyNessuna valutazione finora
- Medical Chest ListDocumento9 pagineMedical Chest ListSreedarsh MenonNessuna valutazione finora
- Seamanship - DefinitionDocumento2 pagineSeamanship - DefinitionFrenzie Mae Vasquez Rivera0% (1)
- Bow ThrustersDocumento15 pagineBow ThrustersJohn Angelo Tuliao100% (1)
- SquatDocumento22 pagineSquatbgarneiro100% (1)
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersDa EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersValutazione: 5 su 5 stelle5/5 (1)
- Britannia P&I Additional Insurances Rules 2023Documento62 pagineBritannia P&I Additional Insurances Rules 2023okandandinNessuna valutazione finora
- Port Operators Liability Insurance PolicyDocumento22 paginePort Operators Liability Insurance PolicyokandandinNessuna valutazione finora
- NS Rule Books War Risk Rules 2023 24Documento72 pagineNS Rule Books War Risk Rules 2023 24okandandinNessuna valutazione finora
- Mentoring Seafarers ReportDocumento56 pagineMentoring Seafarers ReportokandandinNessuna valutazione finora
- The London Club P&I Rules-Class-5!23!24Documento70 pagineThe London Club P&I Rules-Class-5!23!24okandandinNessuna valutazione finora
- Collisions How To Avoid ThemDocumento45 pagineCollisions How To Avoid Themokandandin100% (1)
- American Club by Laws Rules 2023-24Documento148 pagineAmerican Club by Laws Rules 2023-24okandandinNessuna valutazione finora
- DanPilot Pilotage Pre-Planning GuideDocumento28 pagineDanPilot Pilotage Pre-Planning GuideokandandinNessuna valutazione finora
- Danpilot Professional FootprintDocumento62 pagineDanpilot Professional FootprintokandandinNessuna valutazione finora
- Isle of Man Masters Handbook (September-2021)Documento52 pagineIsle of Man Masters Handbook (September-2021)okandandinNessuna valutazione finora
- Danpilot Stigsnaes Ensted Plus15mDocumento24 pagineDanpilot Stigsnaes Ensted Plus15mokandandinNessuna valutazione finora
- DanPilot Pilotage Pre-Planning GuideDocumento88 pagineDanPilot Pilotage Pre-Planning GuideokandandinNessuna valutazione finora
- A Master Guide To Shipboard Accident ResponseDocumento22 pagineA Master Guide To Shipboard Accident Responseokandandin100% (1)
- Rotortug Shiphandling Part 2Documento12 pagineRotortug Shiphandling Part 2okandandinNessuna valutazione finora
- DanPilot Pilotage Pre-Planning GuideDocumento90 pagineDanPilot Pilotage Pre-Planning GuideokandandinNessuna valutazione finora
- Akin Publishing 2000 YDSDocumento25 pagineAkin Publishing 2000 YDSokandandin0% (1)
- Akin Publishing VOGA TestsDocumento29 pagineAkin Publishing VOGA TestsokandandinNessuna valutazione finora
- Rotortug Shiphandling Part 1Documento11 pagineRotortug Shiphandling Part 1okandandinNessuna valutazione finora
- Rotor TugDocumento17 pagineRotor TugokandandinNessuna valutazione finora
- Norsafe Tor Mk2 Next Generation On-Load Release Equipment For LifeboatsDocumento2 pagineNorsafe Tor Mk2 Next Generation On-Load Release Equipment For LifeboatsokandandinNessuna valutazione finora
- Norsafe Workboats Multi-Purpose VesselsDocumento2 pagineNorsafe Workboats Multi-Purpose VesselsokandandinNessuna valutazione finora
- A Review of Linear AlgebraDocumento19 pagineA Review of Linear AlgebraOsman Abdul-MuminNessuna valutazione finora
- (Js-Umum) Daftar Harga 01 Maret '23Documento1 pagina(Js-Umum) Daftar Harga 01 Maret '23Kristin NataliaNessuna valutazione finora
- Using A Wet Film ThicknessDocumento2 pagineUsing A Wet Film ThicknesssanoopvkNessuna valutazione finora
- Backlash SDPDocumento11 pagineBacklash SDPPatrick Cyr GagnéNessuna valutazione finora
- Module II Activated Sludge Math ProblemsDocumento5 pagineModule II Activated Sludge Math ProblemsArashNessuna valutazione finora
- TamasDocumento180 pagineTamaslike 2Nessuna valutazione finora
- Jetline: Theoretical Working Point Performance ChartDocumento1 paginaJetline: Theoretical Working Point Performance ChartMohamed GamalNessuna valutazione finora
- RA No. 9514 Revised Fire CodeDocumento11 pagineRA No. 9514 Revised Fire Coderaegab100% (32)
- Mits Chocolates: Let The Life Be More Sweet'Documento30 pagineMits Chocolates: Let The Life Be More Sweet'Azaz NathaniNessuna valutazione finora
- RA - Ducting WorksDocumento6 pagineRA - Ducting WorksResearcherNessuna valutazione finora
- Questionpaper Unit1WCH01 January2018 IAL Edexcel ChemistryDocumento24 pagineQuestionpaper Unit1WCH01 January2018 IAL Edexcel Chemistryshawon.sbd06Nessuna valutazione finora
- Maximum Influence at A Point Dueto A Series of Concentrated LoadsDocumento12 pagineMaximum Influence at A Point Dueto A Series of Concentrated LoadsAyad SlabyNessuna valutazione finora
- Submittal ReviewDocumento22 pagineSubmittal ReviewuddinnadeemNessuna valutazione finora
- Dynamic-Light-Scattering - MDLDocumento5 pagineDynamic-Light-Scattering - MDLJose Daniel Izquierdo MorenoNessuna valutazione finora
- API 571 Quick ReviewDocumento32 pagineAPI 571 Quick ReviewMahmoud Hagag100% (1)
- Ee115hw+sol03 06 N PDFDocumento6 pagineEe115hw+sol03 06 N PDFthinkberry22100% (1)
- 1753-Article Text-39640-3-10-20220815Documento9 pagine1753-Article Text-39640-3-10-20220815Inah SaritaNessuna valutazione finora
- Danh M C AHTN 2017 - HS Code 2017 PDFDocumento564 pagineDanh M C AHTN 2017 - HS Code 2017 PDFBao Ngoc Nguyen100% (1)
- Manual For Noncommissioned Officers and Privates of Infantry of The Army of The United StatesDocumento250 pagineManual For Noncommissioned Officers and Privates of Infantry of The Army of The United StatesGutenberg.org100% (1)
- 7 Stages of NafsDocumento7 pagine7 Stages of NafsLilyNessuna valutazione finora
- Origami Undergrad ThesisDocumento63 pagineOrigami Undergrad ThesisEduardo MullerNessuna valutazione finora
- Chemistry - JEE Main 2024 January - Detailed Analysis by MathonGoDocumento3 pagineChemistry - JEE Main 2024 January - Detailed Analysis by MathonGoGulam Naziruddin Makandar (NuTHeaD94)Nessuna valutazione finora
- WorldShop CatalougeDocumento200 pagineWorldShop Catalougee2ashNessuna valutazione finora
- Brief List of Temples in Haridwar Is Given BelowDocumento8 pagineBrief List of Temples in Haridwar Is Given BelowPritesh BamaniaNessuna valutazione finora
- Igc 3 Practical NeboshDocumento20 pagineIgc 3 Practical NeboshAbdelkader FattoucheNessuna valutazione finora
- Sander Protein SkimmersDocumento18 pagineSander Protein Skimmerslleimicojon100% (1)