Potrebbero piacerti anche
- The Speed Control of PMSMDocumento5 pagineThe Speed Control of PMSMMehmet KırgözoğluNessuna valutazione finora
- A Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor DriveDocumento6 pagineA Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor Driveshoebhussain01Nessuna valutazione finora
- KKJJJJJJJBDocumento5 pagineKKJJJJJJJBVigneshRamakrishnanNessuna valutazione finora
- Modeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerDocumento8 pagineModeling and Simulation of Sensorless Control of PMSM With Luenberger Rotor Position Observer and Sui Pid ControllerYassine MbzNessuna valutazione finora
- Research and Apply PID Hybrid Fuzzy Control TechnologyDocumento6 pagineResearch and Apply PID Hybrid Fuzzy Control TechnologyhoangepuNessuna valutazione finora
- Simulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodDocumento7 pagineSimulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodseventhsensegroupNessuna valutazione finora
- Jpe 8-4-8Documento9 pagineJpe 8-4-8Hieu LENessuna valutazione finora
- Control System NotesDocumento199 pagineControl System NotesCarson R. Dick100% (2)
- Speed Anti-Windup PI Strategies Review For Field Oriented Control of Permanent Magnet Synchronous MachinesDocumento6 pagineSpeed Anti-Windup PI Strategies Review For Field Oriented Control of Permanent Magnet Synchronous MachinesOmegalpha5Nessuna valutazione finora
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocumento5 pagineAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNessuna valutazione finora
- Closed-Loop Control of DC Drives With Controlled RectifierDocumento40 pagineClosed-Loop Control of DC Drives With Controlled Rectifierathan19490% (1)
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsDocumento4 pagineResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloNessuna valutazione finora
- 00998095Documento6 pagine00998095rockon3110cNessuna valutazione finora
- Speed Regulation of Induction Motor Using Sliding Mode Control SchemeDocumento5 pagineSpeed Regulation of Induction Motor Using Sliding Mode Control SchemeranaateeqNessuna valutazione finora
- Robust DTC Control of Doubly-Fed Induction Machines Using Recurrent Neural NetworksDocumento7 pagineRobust DTC Control of Doubly-Fed Induction Machines Using Recurrent Neural NetworksnaserhashemniaNessuna valutazione finora
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocumento11 pagineSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNessuna valutazione finora
- Pi Control System Based Speed Control of DC Motor Using MicrocontrollerDocumento13 paginePi Control System Based Speed Control of DC Motor Using MicrocontrollerAnkit BhardwajNessuna valutazione finora
- Fuzzy Sliding Mode Controller for Field-Oriented Induction Motor DriveDocumento6 pagineFuzzy Sliding Mode Controller for Field-Oriented Induction Motor DriveAshwani RanaNessuna valutazione finora
- CS Mod1 QBDocumento10 pagineCS Mod1 QBthenithyanagrajNessuna valutazione finora
- Paper ID 105Documento6 paginePaper ID 105hassenbbNessuna valutazione finora
- Disturbance Observer Based Current Controller For A Brushed DC MotorDocumento6 pagineDisturbance Observer Based Current Controller For A Brushed DC MotorAji Brahma NugrohoNessuna valutazione finora
- Self-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverDocumento5 pagineSelf-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverrezadigitNessuna valutazione finora
- PI-CONTROLLER DESIGN FOR VECTOR CONTROLLED PMSMDocumento7 paginePI-CONTROLLER DESIGN FOR VECTOR CONTROLLED PMSMlalitbickNessuna valutazione finora
- Adaptive Backstepping Control of Separately Excited DC MotorDocumento6 pagineAdaptive Backstepping Control of Separately Excited DC MotorEngr XamirNessuna valutazione finora
- Automatic Voltage Regulator and Fuzzy Logic Power System StabilizerDocumento6 pagineAutomatic Voltage Regulator and Fuzzy Logic Power System Stabilizerayou_smartNessuna valutazione finora
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocumento6 pagineArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNessuna valutazione finora
- Icee2015 Paper Id3911Documento4 pagineIcee2015 Paper Id3911Zellagui EnergyNessuna valutazione finora
- Antenna AzimuthDocumento3 pagineAntenna AzimuthAnonymous PyFkX4jYVWNessuna valutazione finora
- MEC522: Control Engineering PBL AssignmentDocumento3 pagineMEC522: Control Engineering PBL Assignmentanisalyaa100% (1)
- DC MotorDocumento6 pagineDC MotorKumaran SgNessuna valutazione finora
- Model Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationDocumento19 pagineModel Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationAlimamy KoromaNessuna valutazione finora
- Modeling and Control of Active Suspension Using Pismc and SMCDocumento10 pagineModeling and Control of Active Suspension Using Pismc and SMCjulioandres2011Nessuna valutazione finora
- 6th International Conference on Electromechanical and Power Systems Analyzes Energy Efficiency of Trolleybus TractionDocumento6 pagine6th International Conference on Electromechanical and Power Systems Analyzes Energy Efficiency of Trolleybus Tractionlongtrandang5867Nessuna valutazione finora
- Paper Title: Ajay Kumar Gudla and Saikat ChakrabartiDocumento5 paginePaper Title: Ajay Kumar Gudla and Saikat ChakrabartiAshutosh KumarNessuna valutazione finora
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocumento6 pagineComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20Nessuna valutazione finora
- Simulation of DFIG Wind Turbines Ride Through CapabilityDocumento9 pagineSimulation of DFIG Wind Turbines Ride Through CapabilityDanny LiNessuna valutazione finora
- Design of Turning Control For Vehicle: TrackedDocumento4 pagineDesign of Turning Control For Vehicle: TrackedsherishaNessuna valutazione finora
- The Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerDocumento5 pagineThe Speed and Torque Control of Direct Current Servo Motors by Using Cascade Fuzzy PI ControllerAndy MeyerNessuna valutazione finora
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocumento5 pagineSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNessuna valutazione finora
- Three-Phase Induction Motor DTC-SVM Scheme With Self-Tuning PI-Type Fuzzy ControllerDocumento6 pagineThree-Phase Induction Motor DTC-SVM Scheme With Self-Tuning PI-Type Fuzzy Controllerjorgeluis.unknownman667Nessuna valutazione finora
- Design and Simulation of Fuzzy-PID Controller Based On Mixed Injection Molding MachineDocumento3 pagineDesign and Simulation of Fuzzy-PID Controller Based On Mixed Injection Molding MachineEduardo Molina PerezNessuna valutazione finora
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForDocumento12 pagineDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250Nessuna valutazione finora
- Lab 1Documento4 pagineLab 1Abdalla Fathy100% (1)
- Lecture I - Introduction To PID Control SystemDocumento47 pagineLecture I - Introduction To PID Control SystemR.W. SaputraNessuna valutazione finora
- Constrained Predictive Control of a Servo-Driven Tracking TurretDocumento6 pagineConstrained Predictive Control of a Servo-Driven Tracking TurretVu Duc TruongNessuna valutazione finora
- DC Control MethodDocumento22 pagineDC Control MethodSyed Haidar Ali ZaidiNessuna valutazione finora
- Tesis JuanCamiloNustes Article Format Draft2Documento19 pagineTesis JuanCamiloNustes Article Format Draft2kamdem kouam ynnickNessuna valutazione finora
- Control System ExperimentsDocumento47 pagineControl System ExperimentsRicky RawNessuna valutazione finora
- Fuzzy Logic Based Direct Power Control of Induction Motor DriveDocumento11 pagineFuzzy Logic Based Direct Power Control of Induction Motor DriveNagulapati KiranNessuna valutazione finora
- Jia 2012Documento6 pagineJia 2012Anonymous hDJIZwEuoNessuna valutazione finora
- Comparison of FOC and DTCDocumento6 pagineComparison of FOC and DTCchienbkaNessuna valutazione finora
- Design of an optimal controller for electric power steering systemsDocumento5 pagineDesign of an optimal controller for electric power steering systemsbbeeNessuna valutazione finora
- Project Report DCSDocumento51 pagineProject Report DCSEngr XamirNessuna valutazione finora
- Accurate Modelling of DC Brushless Motor Drive for IndustryDocumento4 pagineAccurate Modelling of DC Brushless Motor Drive for IndustryleodazitaNessuna valutazione finora
- A Direct Torque Control Method For CSC Based PMSG Wind Energy Conversion SystemsDocumento7 pagineA Direct Torque Control Method For CSC Based PMSG Wind Energy Conversion SystemsLê Xuân ThăngNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Distributed Model Predictive Control for Plant-Wide SystemsDa EverandDistributed Model Predictive Control for Plant-Wide SystemsNessuna valutazione finora
- MASTA 10.1 Release NotesDocumento28 pagineMASTA 10.1 Release NotesSiva ReddyNessuna valutazione finora
- Load-Sharing Characteristics of Power-Split Transm PDFDocumento12 pagineLoad-Sharing Characteristics of Power-Split Transm PDFSiva ReddyNessuna valutazione finora
- A Study On The Design of BLDC Motor Replacing FerrDocumento10 pagineA Study On The Design of BLDC Motor Replacing FerrSiva ReddyNessuna valutazione finora
- Effect of Shot Peening Old Paper by MistubhishiDocumento11 pagineEffect of Shot Peening Old Paper by MistubhishiSiva ReddyNessuna valutazione finora
- Tech-02 Suspension Geometry Relations 4Documento11 pagineTech-02 Suspension Geometry Relations 4Siva ReddyNessuna valutazione finora
- Development of Virtual Dynamometer Using dSPACE ControlDesk - TCS PuneDocumento13 pagineDevelopment of Virtual Dynamometer Using dSPACE ControlDesk - TCS PuneSiva ReddyNessuna valutazione finora
- Simple Explanation Shot Peening of GearsDocumento8 pagineSimple Explanation Shot Peening of GearsSiva ReddyNessuna valutazione finora
- Gear Oil ClassificationDocumento27 pagineGear Oil ClassificationSiva ReddyNessuna valutazione finora
- Grinding Induced Changes Residual StressDocumento8 pagineGrinding Induced Changes Residual StressSiva ReddyNessuna valutazione finora
- Losses in Gear Box ModellingDocumento10 pagineLosses in Gear Box ModellingSiva ReddyNessuna valutazione finora
- Fatigue Failure Prediction of Press Fitted Parts Subjected To A Cyclic LoadingDocumento9 pagineFatigue Failure Prediction of Press Fitted Parts Subjected To A Cyclic Loadingxd0Nessuna valutazione finora
- Gear Grindding For Racing TransmissionDocumento4 pagineGear Grindding For Racing TransmissionSiva ReddyNessuna valutazione finora
- Gear Grindding For Racing TransmissionDocumento4 pagineGear Grindding For Racing TransmissionSiva ReddyNessuna valutazione finora
- Calentador Fostoria FES 1024 1CADocumento12 pagineCalentador Fostoria FES 1024 1CAAlex vilca100% (1)
- Early Detection of Insulation Failure in Electric MotorsDocumento23 pagineEarly Detection of Insulation Failure in Electric MotorsYong LiNessuna valutazione finora
- N6 Control Systems August 2018Documento14 pagineN6 Control Systems August 2018lechutnmNessuna valutazione finora
- MatlabDocumento37 pagineMatlabviniroxNessuna valutazione finora
- Ipt Report (Sample)Documento18 pagineIpt Report (Sample)Murughesh MurughesanNessuna valutazione finora
- TR 5a v2.2Documento92 pagineTR 5a v2.2ulperezNessuna valutazione finora
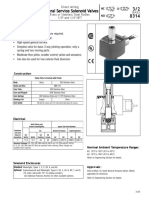
- General Service Solenoid Valves: NC NO UDocumento4 pagineGeneral Service Solenoid Valves: NC NO UgiopetrizzoNessuna valutazione finora
- Abbauto 50xm100n Manual PDFDocumento165 pagineAbbauto 50xm100n Manual PDFEdison LuisNessuna valutazione finora
- PARKER Amplificacador Valvula Proporcional VS111 HY11-5715-577 UKDocumento7 paginePARKER Amplificacador Valvula Proporcional VS111 HY11-5715-577 UKUbiratan JuniorNessuna valutazione finora
- Automatic Vehicle Speed Control at School ZonesDocumento4 pagineAutomatic Vehicle Speed Control at School ZonesNareshNessuna valutazione finora
- Honda Goldwing GL1500 Radio External Wiring DiagramDocumento2 pagineHonda Goldwing GL1500 Radio External Wiring DiagramVanadia Nohan67% (3)
- Computer Organization and Design Mips Edition 5th Edition Patterson Solutions ManualDocumento9 pagineComputer Organization and Design Mips Edition 5th Edition Patterson Solutions Manualmatthewmorrisonsmwqkifnjx94% (17)
- Jaquet T400: Speed Measurement, Switching and Indicating InstrumentsDocumento4 pagineJaquet T400: Speed Measurement, Switching and Indicating InstrumentsPavel MelnikovNessuna valutazione finora
- InteliSys Gas 1 5 0 Grid Codes GuideDocumento667 pagineInteliSys Gas 1 5 0 Grid Codes GuideSebastianx LexNessuna valutazione finora
- Oscilloscope Based on Small-Size FPGA with VGA DisplayDocumento3 pagineOscilloscope Based on Small-Size FPGA with VGA DisplayCarlosReisNessuna valutazione finora
- Electronics (H) QPDocumento25 pagineElectronics (H) QPChloe CadoretNessuna valutazione finora
- Paradox Spectra RTX3 Programming/Reference ManualDocumento2 pagineParadox Spectra RTX3 Programming/Reference ManualHayden WilsonNessuna valutazione finora
- Tem-Evo System and Mwm2032 - TEM EVO-Programmable Logic Controllers (PLC) - Eng-TipsDocumento3 pagineTem-Evo System and Mwm2032 - TEM EVO-Programmable Logic Controllers (PLC) - Eng-TipsJafarShojaNessuna valutazione finora
- ArduinoDocumento3 pagineArduinoCrash ZerocoolNessuna valutazione finora
- Gas Analyzer - YokogawaDocumento22 pagineGas Analyzer - YokogawaM.K.KARTHIKEYANNessuna valutazione finora
- Electrical Test EquipmentDocumento23 pagineElectrical Test EquipmentChristine joy VelezNessuna valutazione finora
- Prysmian Fire Rated CableDocumento1 paginaPrysmian Fire Rated Cablezisis81Nessuna valutazione finora
- L-33 (SM) (Ia&c) ( (Ee) Nptel)Documento18 pagineL-33 (SM) (Ia&c) ( (Ee) Nptel)Marvin BayanayNessuna valutazione finora
- PSP Chap 5Documento8 paginePSP Chap 5abdullah74350Nessuna valutazione finora
- Underwater - Windmill 2Documento9 pagineUnderwater - Windmill 2Yadnyesh TaNessuna valutazione finora
- Bluetooth Hands-Free System GuideDocumento16 pagineBluetooth Hands-Free System Guidegswalia818342Nessuna valutazione finora
- Electonics Final HandoutsDocumento84 pagineElectonics Final HandoutsDiane BasilioNessuna valutazione finora
- Unit 2 Microwave Link DesignDocumento37 pagineUnit 2 Microwave Link DesignSagar ChaulagaiNessuna valutazione finora
- Service: ManualDocumento155 pagineService: Manualdennischauvin3973Nessuna valutazione finora