Potrebbero piacerti anche
- Design and Performance Analysis of Genetic Based PID-PSS With SVC in A Multi-Machine System Considering Detailed ModelDocumento9 pagineDesign and Performance Analysis of Genetic Based PID-PSS With SVC in A Multi-Machine System Considering Detailed ModelIDESNessuna valutazione finora
- Study of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMDocumento8 pagineStudy of Structural Behaviour of Gravity Dam With Various Features of Gallery by FEMIDESNessuna valutazione finora
- Power System State Estimation - A ReviewDocumento9 paginePower System State Estimation - A ReviewIDESNessuna valutazione finora
- Line Losses in The 14-Bus Power System Network Using UPFCDocumento6 pagineLine Losses in The 14-Bus Power System Network Using UPFCIDESNessuna valutazione finora
- Artificial Intelligence Technique Based Reactive Power Planning Incorporating FACTS Controllers in Real Time Power Transmission SystemDocumento7 pagineArtificial Intelligence Technique Based Reactive Power Planning Incorporating FACTS Controllers in Real Time Power Transmission SystemIDESNessuna valutazione finora
- 1010Documento6 pagine1010Wil LamNessuna valutazione finora
- Cloud Security and Data Integrity With Client Accountability FrameworkDocumento13 pagineCloud Security and Data Integrity With Client Accountability FrameworkIDESNessuna valutazione finora
- Permutation of Pixels Within The Shares of Visual Cryptography Using KBRP For Enhanced SecurityDocumento9 paginePermutation of Pixels Within The Shares of Visual Cryptography Using KBRP For Enhanced SecurityIDESNessuna valutazione finora
- Optimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmDocumento6 pagineOptimal Placement of DG For Loss Reduction and Voltage Sag Mitigation in Radial Distribution Systems Using ABC AlgorithmIDESNessuna valutazione finora
- Various OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackDocumento6 pagineVarious OSI Layer Attacks and Countermeasure To Enhance The Performance of WSNs During Wormhole AttackIDESNessuna valutazione finora
- Selfish Node Isolation & Incentivation Using Progressive ThresholdsDocumento8 pagineSelfish Node Isolation & Incentivation Using Progressive ThresholdsIDESNessuna valutazione finora
- Optimized Neural Network For Classification of Multispectral ImagesDocumento6 pagineOptimized Neural Network For Classification of Multispectral ImagesIDESNessuna valutazione finora
- Secure Multi-Party Negotiation: An Analysis Forelectronic Payments in Mobile ComputingDocumento8 pagineSecure Multi-Party Negotiation: An Analysis Forelectronic Payments in Mobile ComputingIDESNessuna valutazione finora
- Responsive Parameter Based An AntiWorm Approach To Prevent Wormhole Attack in Ad Hoc NetworksDocumento8 pagineResponsive Parameter Based An AntiWorm Approach To Prevent Wormhole Attack in Ad Hoc NetworksIDESNessuna valutazione finora
- Texture Unit Based Monocular Real-World Scene Classification Using SOM and KNN ClassifierDocumento8 pagineTexture Unit Based Monocular Real-World Scene Classification Using SOM and KNN ClassifierIDESNessuna valutazione finora
- Enhancing Data Storage Security in Cloud Computing Through SteganographyDocumento7 pagineEnhancing Data Storage Security in Cloud Computing Through SteganographyIDESNessuna valutazione finora
- Genetic Algorithm Based Layered Detection and Defense of HTTP BotnetDocumento12 pagineGenetic Algorithm Based Layered Detection and Defense of HTTP BotnetIDESNessuna valutazione finora
- Band Clustering For The Lossless Compression of AVIRIS Hyperspectral ImagesDocumento14 pagineBand Clustering For The Lossless Compression of AVIRIS Hyperspectral ImagesIDESNessuna valutazione finora
- Rotman Lens Performance AnalysisDocumento6 pagineRotman Lens Performance AnalysisIDESNessuna valutazione finora
- Comparative Study of Morphological, Correlation, Hybrid and DCSFPSS Based Morphological & Tribrid Algorithms For GFDDDocumento10 pagineComparative Study of Morphological, Correlation, Hybrid and DCSFPSS Based Morphological & Tribrid Algorithms For GFDDIDESNessuna valutazione finora
- Mental Stress Evaluation Using An Adaptive ModelDocumento8 pagineMental Stress Evaluation Using An Adaptive ModelIDESNessuna valutazione finora
- Genetic Algorithm Based Mosaic Image Steganography For Enhanced SecurityDocumento12 pagineGenetic Algorithm Based Mosaic Image Steganography For Enhanced SecurityIDESNessuna valutazione finora
- 3-D FFT Moving Object Signatures For Velocity FilteringDocumento5 pagine3-D FFT Moving Object Signatures For Velocity FilteringIDESNessuna valutazione finora
- Low Energy Routing For WSN'sDocumento4 pagineLow Energy Routing For WSN'sIDESNessuna valutazione finora
- Microelectronic Circuit Analogous To Hydrogen Bonding Network in Active Site of - LactamaseDocumento8 pagineMicroelectronic Circuit Analogous To Hydrogen Bonding Network in Active Site of - LactamaseIDESNessuna valutazione finora
- Blind Source Separation of Super and Sub-Gaussian Signals With ABC AlgorithmDocumento10 pagineBlind Source Separation of Super and Sub-Gaussian Signals With ABC AlgorithmIDESNessuna valutazione finora
- High Density Salt and Pepper Impulse Noise RemovalDocumento10 pagineHigh Density Salt and Pepper Impulse Noise RemovalIDESNessuna valutazione finora
- Opportunities and Challenges of Software CustomizationDocumento11 pagineOpportunities and Challenges of Software CustomizationIDESNessuna valutazione finora
- Efficient Architecture For Variable Block Size Motion Estimation in H.264/AVCDocumento9 pagineEfficient Architecture For Variable Block Size Motion Estimation in H.264/AVCIDESNessuna valutazione finora
- Ontology-Based Semantic Approach For Learning Object RecommendationDocumento10 pagineOntology-Based Semantic Approach For Learning Object RecommendationIDESNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- MSC 200Documento18 pagineMSC 200Amit KumarNessuna valutazione finora
- Painting: 22.1 Types of PaintsDocumento8 paginePainting: 22.1 Types of PaintsRosy RoseNessuna valutazione finora
- Hung201 PDFDocumento14 pagineHung201 PDFMua Dong Tuyet RoiNessuna valutazione finora
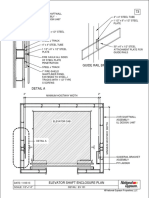
- Guide Rail Bracket AssemblyDocumento1 paginaGuide Rail Bracket AssemblyPrasanth VarrierNessuna valutazione finora
- Annexure I Project Details DateDocumento4 pagineAnnexure I Project Details DateAshish SinghaniaNessuna valutazione finora
- Copy - of - Commonlit - Meet The Fearless Cook Who Secretly Fed and Funded The Civil Rights Movement - StudentDocumento6 pagineCopy - of - Commonlit - Meet The Fearless Cook Who Secretly Fed and Funded The Civil Rights Movement - Studentlilywright08Nessuna valutazione finora
- Available Online Through: International Journal of Mathematical Archive-4 (12), 2013Documento4 pagineAvailable Online Through: International Journal of Mathematical Archive-4 (12), 2013Gwen WalkerNessuna valutazione finora
- BDC Based Phase ControlDocumento14 pagineBDC Based Phase ControlTiewsoh LikyntiNessuna valutazione finora
- LLB IV Sem GST Unit I Levy and Collection Tax by DR Nisha SharmaDocumento7 pagineLLB IV Sem GST Unit I Levy and Collection Tax by DR Nisha Sharmad. CNessuna valutazione finora
- 033 - Flight Planning Monitoring - QuestionsDocumento126 pagine033 - Flight Planning Monitoring - QuestionsEASA ATPL Question Bank100% (4)
- Omegas Prezentacija 01Documento20 pagineOmegas Prezentacija 01Predrag Djordjevic100% (1)
- PET Formal Letter SamplesDocumento7 paginePET Formal Letter SamplesLe Anh ThuNessuna valutazione finora
- 面向2035的新材料强国战略研究 谢曼Documento9 pagine面向2035的新材料强国战略研究 谢曼hexuan wangNessuna valutazione finora
- Amazon Tax Information InterviewDocumento2 pagineAmazon Tax Information Interviewasad nNessuna valutazione finora
- PTEG Spoken OfficialSampleTest L5 17mar11Documento8 paginePTEG Spoken OfficialSampleTest L5 17mar11Katia LeliakhNessuna valutazione finora
- English Examination 1-Bdsi-XiDocumento1 paginaEnglish Examination 1-Bdsi-XiHarsuni Winarti100% (1)
- Trandsend 2Documento3 pagineTrandsend 2dadiNessuna valutazione finora
- Oracle® Secure Backup: Installation and Configuration Guide Release 10.4Documento178 pagineOracle® Secure Backup: Installation and Configuration Guide Release 10.4andrelmacedoNessuna valutazione finora
- Comparison of Offline and Online Partial Discharge For Large Mot PDFDocumento4 pagineComparison of Offline and Online Partial Discharge For Large Mot PDFcubarturNessuna valutazione finora
- Syllabus Math 305Documento4 pagineSyllabus Math 305Nataly SusanaNessuna valutazione finora
- 2062 TSSR Site Sharing - Rev02Documento44 pagine2062 TSSR Site Sharing - Rev02Rio DefragNessuna valutazione finora
- What Is A Timer?Documento12 pagineWhat Is A Timer?Hemraj Singh Rautela100% (1)
- Surge Protection Devices GuidesDocumento167 pagineSurge Protection Devices GuidessultanprinceNessuna valutazione finora
- Checklist Code ReviewDocumento2 pagineChecklist Code ReviewTrang Đỗ Thu100% (1)
- First Certificate Star SB PDFDocumento239 pagineFirst Certificate Star SB PDFPatricia Gallego GálvezNessuna valutazione finora
- Role of ACT, S & WHO Guidlines For The Treatment of MalariaDocumento34 pagineRole of ACT, S & WHO Guidlines For The Treatment of MalariasalmanNessuna valutazione finora
- Mechanical Vibration and Oscillation in Transmission LinesDocumento27 pagineMechanical Vibration and Oscillation in Transmission LinesChhatrapal SinghNessuna valutazione finora
- E34-1 Battery Charging and Dishcharging BoardDocumento23 pagineE34-1 Battery Charging and Dishcharging BoardGanesa MurthyNessuna valutazione finora
- Strategi Meningkatkan Kapasitas Penangkar Benih Padi Sawah (Oriza Sativa L) Dengan Optimalisasi Peran Kelompok TaniDocumento24 pagineStrategi Meningkatkan Kapasitas Penangkar Benih Padi Sawah (Oriza Sativa L) Dengan Optimalisasi Peran Kelompok TaniHilmyTafantoNessuna valutazione finora
- 127 Bba-204Documento3 pagine127 Bba-204Ghanshyam SharmaNessuna valutazione finora