Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Experiment #3: Sublimation and Melting Point DeterminationDocumento3 pagineExperiment #3: Sublimation and Melting Point DeterminationMarthy DayagNessuna valutazione finora
- 7Documento233 pagine7Hotib PerwiraNessuna valutazione finora
- Chapter 10 - Intermolecular ForcesDocumento13 pagineChapter 10 - Intermolecular ForcesCyrie sheene bilocuraNessuna valutazione finora
- Structure of The EarthDocumento10 pagineStructure of The EarthA 3Nessuna valutazione finora
- MQC Practice ExamDocumento9 pagineMQC Practice ExamStephen RayosoNessuna valutazione finora
- ASME Cases of Boiler and Pressure Vessel CodeDocumento3 pagineASME Cases of Boiler and Pressure Vessel CodeSanthosh ShrinivasNessuna valutazione finora
- Eea 61 1 2013 025 EN LP 000Documento6 pagineEea 61 1 2013 025 EN LP 000kubikNessuna valutazione finora
- M1 Specimen Paper and Mark SchemeDocumento9 pagineM1 Specimen Paper and Mark Schemejayesh1997Nessuna valutazione finora
- Suggested Modifications To ASTM E477Documento14 pagineSuggested Modifications To ASTM E477Jerry LillyNessuna valutazione finora
- List of Textile Universities in USADocumento3 pagineList of Textile Universities in USAFazle RubbiNessuna valutazione finora
- En 2014 New Brochure WebDocumento20 pagineEn 2014 New Brochure WebSasa NackovicNessuna valutazione finora
- AP Sem 1 Final ReviewDocumento42 pagineAP Sem 1 Final ReviewSakib AlamNessuna valutazione finora
- API 650 12th - 2013Documento4 pagineAPI 650 12th - 2013mohamed100% (1)
- Welding Complete PPT With QuestionDocumento50 pagineWelding Complete PPT With QuestionKBSMANITNessuna valutazione finora
- AAMA WDMA CSA 101I.S. 2-A440-08 UPD 2-2008 Standard For Windows, Doors, & Unit SkylightsDocumento6 pagineAAMA WDMA CSA 101I.S. 2-A440-08 UPD 2-2008 Standard For Windows, Doors, & Unit SkylightsTony Chinese100% (1)
- Ejercicios PDFDocumento4 pagineEjercicios PDFserepoesia10Nessuna valutazione finora
- Calculation of Air Duct Pressure Loss (Rectangular)Documento15 pagineCalculation of Air Duct Pressure Loss (Rectangular)Phyu Mar Thein KyawNessuna valutazione finora
- Materi MatrikulasiDocumento72 pagineMateri MatrikulasiAyziffyNessuna valutazione finora
- A Handbook For Seismic AttributesDocumento269 pagineA Handbook For Seismic AttributesFurqan Mahmud100% (1)
- Refrigerant Recovery System 3600Documento20 pagineRefrigerant Recovery System 3600lorenzoNessuna valutazione finora
- P5 Q1 Experimental Design Updated To MJ22 ALL TOPICSDocumento6 pagineP5 Q1 Experimental Design Updated To MJ22 ALL TOPICSSaad NahraNessuna valutazione finora
- X-Ray DiffractionDocumento26 pagineX-Ray DiffractionZain Ali KidwaiNessuna valutazione finora
- Washing MachineDocumento17 pagineWashing MachineBhawna Saini0% (1)
- MiniProject Stage 3 - Process Dynamic & ControlDocumento8 pagineMiniProject Stage 3 - Process Dynamic & ControlFarihah Eyfa100% (2)
- Polarity of Molecules and Its PropertiesDocumento34 paginePolarity of Molecules and Its PropertiesNica Floresta - MendozaNessuna valutazione finora
- Factsheet C UnderstandingJobHazards ESDocumento1 paginaFactsheet C UnderstandingJobHazards ESIvan RodrigoNessuna valutazione finora
- Open and Closed Systems in ThermodynamicDocumento2 pagineOpen and Closed Systems in ThermodynamicArafath JazeebNessuna valutazione finora
- AAPL Capability StatementDocumento41 pagineAAPL Capability StatementjsmnjasminesNessuna valutazione finora
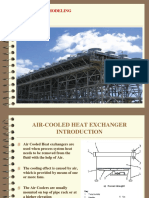
- Air Cooler-Modeling and AnalysisDocumento25 pagineAir Cooler-Modeling and Analysisvivek100% (1)
- New Frontiers For The Pipeline Integrity ManagementDocumento16 pagineNew Frontiers For The Pipeline Integrity ManagementMubeenNessuna valutazione finora