Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- A Comparative Study On Nutritional Quality and AcceptabilityDocumento33 pagineA Comparative Study On Nutritional Quality and Acceptabilitysjo05Nessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Hypoglycaemic and Hypoglycaemic Effect of Morinda CitrifoliaDocumento22 pagineHypoglycaemic and Hypoglycaemic Effect of Morinda Citrifoliasjo05Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- AestheticsDocumento33 pagineAestheticssjo05Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Food in Stress ManagementDocumento48 pagineFood in Stress Managementsjo05100% (6)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Home Sci EducationDocumento18 pagineHome Sci Educationsjo05Nessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- ICSSHDocumento17 pagineICSSHsjo05Nessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Fuel Modulation and Hormonal Regulation of Energy MetabolismDocumento13 pagineFuel Modulation and Hormonal Regulation of Energy Metabolismsjo05Nessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Health and Fitness DR Anna ChellappaDocumento94 pagineHealth and Fitness DR Anna Chellappasjo05Nessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Article 4 - HomescienceDocumento9 pagineArticle 4 - Homesciencesjo05Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Assessment of Nutritional Status of Selected Women Lecturers in Chennai City Danya T V and Kaveri RDocumento10 pagineAssessment of Nutritional Status of Selected Women Lecturers in Chennai City Danya T V and Kaveri Rsjo05Nessuna valutazione finora
- NONI and Quality of Llife of Women RevisedDocumento49 pagineNONI and Quality of Llife of Women Revisedsjo05Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Life Skills For Women's EmpowermentDocumento38 pagineLife Skills For Women's Empowermentsjo0583% (12)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Antiderivatives, Differential Equations, and Slope FieldsDocumento15 pagineAntiderivatives, Differential Equations, and Slope Fieldssjo05Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Article 5 - HomescienceDocumento19 pagineArticle 5 - Homesciencesjo05Nessuna valutazione finora
- Kinematics Using GraphsDocumento10 pagineKinematics Using Graphssjo05Nessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Laplace TransformDocumento28 pagineLaplace Transformsjo05Nessuna valutazione finora
- Correlation and CovarianceDocumento19 pagineCorrelation and Covariancesjo05Nessuna valutazione finora
- Application of MathsDocumento5 pagineApplication of Mathssjo05Nessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Calculus Notes CH 6Documento9 pagineCalculus Notes CH 6kodalidhanaNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- GeometryDocumento9 pagineGeometrysjo05Nessuna valutazione finora
- Graph TheoryDocumento26 pagineGraph TheoryMuthumanikandan HariramanNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Linear EquationsDocumento10 pagineLinear EquationsMuthumanikandan HariramanNessuna valutazione finora
- Number TheoryDocumento35 pagineNumber Theorysjo05Nessuna valutazione finora
- Maths IntroductionDocumento8 pagineMaths IntroductionChandrasekhar KrishnanNessuna valutazione finora
- Photo Album: by Sri AmbalDocumento11 paginePhoto Album: by Sri Ambalsjo05Nessuna valutazione finora
- Partial Differential EquationDocumento18 paginePartial Differential Equationsjo050% (1)
- Music Therapy Why & HowDocumento1 paginaMusic Therapy Why & Howsjo05Nessuna valutazione finora
- Careers in MusicDocumento2 pagineCareers in Musicsjo05Nessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Tiru MuraiDocumento5 pagineTiru Muraisjo05Nessuna valutazione finora
- Divya Naama KeerthanaiDocumento5 pagineDivya Naama Keerthanaisjo05100% (2)
- Guppa - Se Ultra300x Servicemanual PDFDocumento560 pagineGuppa - Se Ultra300x Servicemanual PDFPatrik Benjaro100% (1)
- 5 - Blueprint Cycle I UT - I (2022-23)Documento4 pagine5 - Blueprint Cycle I UT - I (2022-23)Monia PunyaniNessuna valutazione finora
- Unit 8: Future Outlook: Central Business Configuration For SAP S/4HANA CloudDocumento9 pagineUnit 8: Future Outlook: Central Business Configuration For SAP S/4HANA CloudKarina San MartinNessuna valutazione finora
- Pusk - Bkl-Permohonan DatabaseDocumento45 paginePusk - Bkl-Permohonan DatabaseSarjanaMudaNessuna valutazione finora
- High-Definition Multimedia Interface SpecificationDocumento51 pagineHigh-Definition Multimedia Interface SpecificationwadrNessuna valutazione finora
- Netcat ManualDocumento7 pagineNetcat ManualRitcher HardyNessuna valutazione finora
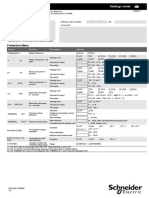
- VIP400 Settings Sheet NRJED311208ENDocumento2 pagineVIP400 Settings Sheet NRJED311208ENVăn NguyễnNessuna valutazione finora
- Demi KidDocumento169 pagineDemi KidGagat Ragil Andaru PratomoNessuna valutazione finora
- F7400 Vs BHT8048Documento1 paginaF7400 Vs BHT8048Arief RahardjoNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The IT System That Couldn't Deliver SummaryDocumento3 pagineThe IT System That Couldn't Deliver SummaryWnsyuhada Ismail100% (1)
- Functionality Type of License AxxonDocumento3 pagineFunctionality Type of License AxxonMikael leandroNessuna valutazione finora
- Documents of Interest Re Synthetic Telepathy May 26, 2015Documento235 pagineDocuments of Interest Re Synthetic Telepathy May 26, 2015Stan J. CaterboneNessuna valutazione finora
- Bca 501Documento2 pagineBca 501api-3782519Nessuna valutazione finora
- Teaching Distance Relay Using Matlab - Simulink Graphical User Interface - Hafizi Idris - AcademiaDocumento4 pagineTeaching Distance Relay Using Matlab - Simulink Graphical User Interface - Hafizi Idris - AcademiarajababudonikiNessuna valutazione finora
- Microprocessors and MicrocontrollersDocumento34 pagineMicroprocessors and Microcontrollers6012 ANILNessuna valutazione finora
- Today's Date:: Schedule / Time Log Notes Prioritized To-Do ListDocumento3 pagineToday's Date:: Schedule / Time Log Notes Prioritized To-Do ListSumedhNessuna valutazione finora
- Growth Marketing Final PresentationDocumento17 pagineGrowth Marketing Final PresentationAmna AhmedNessuna valutazione finora
- Wlguide PDFDocumento130 pagineWlguide PDFElaine MagcawasNessuna valutazione finora
- Chapter 2 Conceptualized InteractionDocumento32 pagineChapter 2 Conceptualized InteractionnancyNessuna valutazione finora
- Uenr25330001Documento8 pagineUenr25330001William carlos Trujillo cruzNessuna valutazione finora
- Name Any Three Client Applications To Connect With FTP ServerDocumento5 pagineName Any Three Client Applications To Connect With FTP ServerI2414 Hafiz Muhammad Zeeshan E1Nessuna valutazione finora
- Architectural Design Case Studies: Useful Online ResourcesDocumento3 pagineArchitectural Design Case Studies: Useful Online Resourcesnysidlibrary100% (1)
- GS DataMatrix GuidelineDocumento66 pagineGS DataMatrix GuidelineSuraj SupekarNessuna valutazione finora
- ICF 3 - LAS - W6 - Inserting Clip Art, WordArt and PicturesDocumento6 pagineICF 3 - LAS - W6 - Inserting Clip Art, WordArt and PicturesAljohn LumapasNessuna valutazione finora
- 29-CHT06 Honda Steering Wheel ControlDocumento4 pagine29-CHT06 Honda Steering Wheel Controlalexandre fleureauNessuna valutazione finora
- Data Quality DMB Ok Dam A BrasilDocumento46 pagineData Quality DMB Ok Dam A BrasilforleviNessuna valutazione finora
- Totem Tribe CheatsDocumento7 pagineTotem Tribe Cheatscorrnelia1Nessuna valutazione finora
- Binding Source For DataGridView From Linq To SQL QueryDocumento4 pagineBinding Source For DataGridView From Linq To SQL QueryPhuong LeNessuna valutazione finora
- ControlMaestro 2010Documento2 pagineControlMaestro 2010lettolimaNessuna valutazione finora
- ADAM-5000 IO Module Manual Ed 2.3Documento88 pagineADAM-5000 IO Module Manual Ed 2.3Pham SangNessuna valutazione finora
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthDa EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthValutazione: 4.5 su 5 stelle4.5/5 (197)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchDa EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchValutazione: 4 su 5 stelle4/5 (10)
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeDa EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeValutazione: 3.5 su 5 stelle3.5/5 (165)