Potrebbero piacerti anche
- Pimsleur Spanish IDocumento21 paginePimsleur Spanish INevenly Fae86% (7)
- Ray Casting AlgorithmDocumento3 pagineRay Casting AlgorithmSagarnil NandyNessuna valutazione finora
- Intro DTMDocumento5 pagineIntro DTMHardi Abu KhaleedNessuna valutazione finora
- Fundamentals of PhotogrammetryDocumento25 pagineFundamentals of PhotogrammetryvprochockyNessuna valutazione finora
- Land Desktop 2009 TutorialsDocumento254 pagineLand Desktop 2009 TutorialsSpica Dim100% (1)
- Pe 2 ExamDocumento2 paginePe 2 ExamRodjan Moscoso100% (1)
- List The Uses of PhotogrammetryDocumento4 pagineList The Uses of Photogrammetrynik fatehah67% (3)
- Orthorectification Using Erdas ImagineDocumento14 pagineOrthorectification Using Erdas ImagineArga Fondra OksapingNessuna valutazione finora
- Introduction To Photogrammetry 22 May 2022Documento63 pagineIntroduction To Photogrammetry 22 May 2022Aisyah KiswantohNessuna valutazione finora
- Map Projections IIDocumento139 pagineMap Projections IIMeire SchmidtNessuna valutazione finora
- Applications of Remote SensingDocumento28 pagineApplications of Remote SensingAkande Olumide SamuelNessuna valutazione finora
- Aereal PhotogrammetryDocumento13 pagineAereal PhotogrammetryJuan GarzonNessuna valutazione finora
- An Improved LOD Specification For 3D Building ModelsDocumento13 pagineAn Improved LOD Specification For 3D Building Modelsminh duongNessuna valutazione finora
- Secrets of Successful Aerial Photography (2000Documento124 pagineSecrets of Successful Aerial Photography (2000K. Wendy OzzzNessuna valutazione finora
- Dem Erdas ImagineDocumento11 pagineDem Erdas ImagineMohannad S ZebariNessuna valutazione finora
- Sentinel-2 User Handbook PDFDocumento64 pagineSentinel-2 User Handbook PDFSahadeb Chandra MajumderNessuna valutazione finora
- Aerial Photography and PhotogrammetryDocumento41 pagineAerial Photography and PhotogrammetryArham SheikhNessuna valutazione finora
- Earth Imaging Basics - Spectral ResolutionDocumento5 pagineEarth Imaging Basics - Spectral ResolutionEduardoLicoNessuna valutazione finora
- Ocean Optics Ebook - FinalDocumento16 pagineOcean Optics Ebook - FinalIndir JaganjacNessuna valutazione finora
- Map Projections and Coordinate SystemDocumento7 pagineMap Projections and Coordinate SystemjparamNessuna valutazione finora
- Development Camera Calibration Methods ModelsDocumento16 pagineDevelopment Camera Calibration Methods Modelsborza_diana8714Nessuna valutazione finora
- Digital Photogrammetry2014Documento125 pagineDigital Photogrammetry2014iurist_nicoletaNessuna valutazione finora
- Introduction To Photogrammetry: Development Cycles of The PhotogrammetryDocumento8 pagineIntroduction To Photogrammetry: Development Cycles of The PhotogrammetryEng Abdulahi HajiNessuna valutazione finora
- Chapter 7 Terrestrial Photogrammetry Chapter 8 Digital PhotogrammetryDocumento33 pagineChapter 7 Terrestrial Photogrammetry Chapter 8 Digital PhotogrammetryKarungi AroneNessuna valutazione finora
- Geodesia Geometrica MITDocumento146 pagineGeodesia Geometrica MITRR886Nessuna valutazione finora
- Modeling Spatial Co-occurrence Patterns in ThesisDocumento111 pagineModeling Spatial Co-occurrence Patterns in ThesisNhyla Wildanul HusnaNessuna valutazione finora
- Bundle AdjustmentDocumento14 pagineBundle Adjustmentfaizz islammNessuna valutazione finora
- Remote SensingDocumento40 pagineRemote SensingPijush KarmakarNessuna valutazione finora
- ASSIGNMENT 1 - Info - ExtractDocumento18 pagineASSIGNMENT 1 - Info - ExtractMOK WAI KHENG A18GH5118Nessuna valutazione finora
- Follow Us @djienterprise: Unleash The Power of OneDocumento8 pagineFollow Us @djienterprise: Unleash The Power of OneElkin DussanNessuna valutazione finora
- Map Projections in ArcGIS: A Gallery of 72 ProjectionsDocumento53 pagineMap Projections in ArcGIS: A Gallery of 72 ProjectionsGabriela Fabiana Sosa Claverí100% (1)
- Scale Measurement For Aerial PhotographyDocumento13 pagineScale Measurement For Aerial PhotographySushant SawantNessuna valutazione finora
- Camera Calibration Toolbox For MatlabDocumento3 pagineCamera Calibration Toolbox For MatlabAndoni Ruiz ErezumaNessuna valutazione finora
- Photogrammetry Principles for Aerial PhotographyDocumento19 paginePhotogrammetry Principles for Aerial PhotographyAulia Rizki DNessuna valutazione finora
- Whitepaper Laser-Tracker Hydro Jan09Documento7 pagineWhitepaper Laser-Tracker Hydro Jan09Sagar PatkiNessuna valutazione finora
- What Is A Coordinate System?Documento6 pagineWhat Is A Coordinate System?EMINAT PRINCE100% (1)
- Gnss Surveying 2021Documento49 pagineGnss Surveying 2021jisongulwa100% (1)
- Bernese GNSS Software: GPS, GLONASS, OrbitsDocumento7 pagineBernese GNSS Software: GPS, GLONASS, OrbitsIka Safitri KurniastutiNessuna valutazione finora
- Digital PhotogrammetryDocumento1 paginaDigital PhotogrammetryJayachandran NellikuppamNessuna valutazione finora
- Coordinate Systems & Map Projection ExplainedDocumento41 pagineCoordinate Systems & Map Projection ExplainedPrasanna Naik100% (1)
- Introduction On Photogrammetry by Koert SijmonsDocumento124 pagineIntroduction On Photogrammetry by Koert SijmonsVishal MishraNessuna valutazione finora
- Stacks Infix PostfixDocumento90 pagineStacks Infix PostfixBeeAshhNessuna valutazione finora
- Remote Sensing - 2020-21Documento173 pagineRemote Sensing - 2020-21BerihunMmanayeNessuna valutazione finora
- Geomatic Concepts: Sr. Dr. Mustaffa Bin Anjang AhmadDocumento50 pagineGeomatic Concepts: Sr. Dr. Mustaffa Bin Anjang AhmadAfnan Hamimi100% (1)
- Build Web GIS Apps with GeoExt and OpenLayersDocumento10 pagineBuild Web GIS Apps with GeoExt and OpenLayersgerardoarielcNessuna valutazione finora
- DEM Generation Using NESTDocumento100 pagineDEM Generation Using NESTAdito MaulanaNessuna valutazione finora
- Gomaa Dawod Page 8 - 2017 PDFDocumento75 pagineGomaa Dawod Page 8 - 2017 PDFSami Abdelgadir MohammedNessuna valutazione finora
- 1 - Intro To GeomaticsDocumento42 pagine1 - Intro To GeomaticsAlisha Garcia100% (1)
- Georeferencing A MapDocumento12 pagineGeoreferencing A MapLia MelinaNessuna valutazione finora
- SAR Remote Sensing (Microwave Remote Sensing) Shared by Eugène Dongmo A.Documento65 pagineSAR Remote Sensing (Microwave Remote Sensing) Shared by Eugène Dongmo A.Eugene DongmoNessuna valutazione finora
- Remote Sensing HydrologyDocumento34 pagineRemote Sensing HydrologyMehboob AlamNessuna valutazione finora
- Photogrammetric Map CompilationDocumento13 paginePhotogrammetric Map CompilationLuis Flores Blanco100% (1)
- Ray Tracing: A Guide to the Rendering TechniqueDocumento40 pagineRay Tracing: A Guide to the Rendering TechniqueManvi SoodNessuna valutazione finora
- Chapter 7 - Coordinate MetrologyDocumento7 pagineChapter 7 - Coordinate MetrologyTanvir DaphedarNessuna valutazione finora
- Chapter 1 - Introduction and Basic ConceptsDocumento8 pagineChapter 1 - Introduction and Basic ConceptsYeevön LeeNessuna valutazione finora
- Static GPS/GNSS Survey Methods Manual: Ian Lauer (Idaho State University)Documento16 pagineStatic GPS/GNSS Survey Methods Manual: Ian Lauer (Idaho State University)Jamhur SudjanaNessuna valutazione finora
- Fast and Subpixel Precise Blob Detection and AttributionDocumento4 pagineFast and Subpixel Precise Blob Detection and AttributionFelix FergosenNessuna valutazione finora
- Image Denoising With The Non-Local Means AlgorithmDocumento9 pagineImage Denoising With The Non-Local Means AlgorithmstefanNessuna valutazione finora
- CE-321 Gps - Slides - EtcDocumento129 pagineCE-321 Gps - Slides - EtcShubham BansalNessuna valutazione finora
- GNSS Data Processing Lab ExercisesDocumento123 pagineGNSS Data Processing Lab ExercisesElena CeraselaNessuna valutazione finora
- 1999 Fundamentals of Remote SensingDocumento225 pagine1999 Fundamentals of Remote SensingMangam RajkumarNessuna valutazione finora
- Ijsrp p20103Documento5 pagineIjsrp p20103BLACKBERRY0Nessuna valutazione finora
- Angles and MeasurementsDocumento15 pagineAngles and MeasurementsSpica DimNessuna valutazione finora
- Ra 7076Documento13 pagineRa 7076Spica DimNessuna valutazione finora
- Using The TransitDocumento4 pagineUsing The TransitSpica DimNessuna valutazione finora
- An Overview of Land Titles and DeedsDocumento5 pagineAn Overview of Land Titles and Deedskarenrae90% (10)
- Math 2 SyllabusDocumento3 pagineMath 2 SyllabusSpica DimNessuna valutazione finora
- Ra 7076Documento13 pagineRa 7076Spica DimNessuna valutazione finora
- Example How To Write A ProposalDocumento9 pagineExample How To Write A ProposalSpoorthi PoojariNessuna valutazione finora
- Integral Calculus SyllabusDocumento3 pagineIntegral Calculus SyllabusSpica Dim100% (5)
- Inverse MatrizDocumento2 pagineInverse MatrizJulian GutierrezNessuna valutazione finora
- Integral Calculus SyllabusDocumento3 pagineIntegral Calculus SyllabusSpica Dim100% (5)
- Matrix AlgebraDocumento9 pagineMatrix AlgebraKeith W BarnwellNessuna valutazione finora
- What Is The Equation of TimeDocumento3 pagineWhat Is The Equation of TimeSpica DimNessuna valutazione finora
- X, X 2 1 Exp 2 1, X NDocumento13 pagineX, X 2 1 Exp 2 1, X NSpica DimNessuna valutazione finora
- Gaussian EliminationDocumento2 pagineGaussian EliminationSpica DimNessuna valutazione finora
- Documents Compass Transit RulesDocumento2 pagineDocuments Compass Transit Rulesckh123Nessuna valutazione finora
- Finding affection and appreciationDocumento19 pagineFinding affection and appreciationRose JennetNessuna valutazione finora
- Đề 9ch 1Documento6 pagineĐề 9ch 1Nhi NguyễnNessuna valutazione finora
- The Space Itself The ExteriorDocumento14 pagineThe Space Itself The Exteriorapi-263296694Nessuna valutazione finora
- Dynamics projectile motion problemsDocumento2 pagineDynamics projectile motion problemsVon A. Damirez0% (1)
- CCM RS232 Cable Wire ConnectionDocumento2 pagineCCM RS232 Cable Wire Connectionlinkangjun0621Nessuna valutazione finora
- Tese de MestradoDocumento279 pagineTese de Mestradosilveiramaia9550100% (1)
- All in The Family - 1x05 - Judging Books by Covers - DVDRip.enDocumento44 pagineAll in The Family - 1x05 - Judging Books by Covers - DVDRip.enSpeedyGonsalesNessuna valutazione finora
- P4 EngDocumento20 pagineP4 EngjNessuna valutazione finora
- PhantomDocumento3 paginePhantomGuilherme FerreiraNessuna valutazione finora
- Flux Meter Hioki EMF 3470Documento4 pagineFlux Meter Hioki EMF 3470industrialindiaNessuna valutazione finora
- Hollywoodbets Greyville Polytrack@2021.11.22Documento4 pagineHollywoodbets Greyville Polytrack@2021.11.22Mitchlin Ryan PillayNessuna valutazione finora
- AQ Errata FAQ v1Documento3 pagineAQ Errata FAQ v1JorgeNessuna valutazione finora
- Boyle Rhonda Boyle RobinDocumento36 pagineBoyle Rhonda Boyle RobinPriyanka BundhooNessuna valutazione finora
- DocumentDocumento5 pagineDocumentKaran KirubajkNessuna valutazione finora
- Kite FestivalDocumento2 pagineKite FestivalSameer KhatriNessuna valutazione finora
- Forecasted Sales From LeadsDocumento3 pagineForecasted Sales From LeadsRoselyn LustreNessuna valutazione finora
- Smo0th CriminalDocumento13 pagineSmo0th CriminalSan Isidro Mps E-reklamoNessuna valutazione finora
- A MAN WHO HAD NO EYES by Mackinlay KantorDocumento2 pagineA MAN WHO HAD NO EYES by Mackinlay Kantoradel 007Nessuna valutazione finora
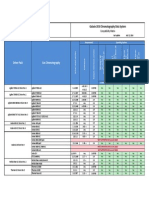
- Galaxie 2010 Chromatography CompatibilityDocumento3 pagineGalaxie 2010 Chromatography CompatibilitymardonioandradeNessuna valutazione finora
- Mixed ManiaDocumento8 pagineMixed ManiaInterweave67% (12)
- Department of Education Schools Division of Ilocos Sur Nagbukel National High SchoolDocumento3 pagineDepartment of Education Schools Division of Ilocos Sur Nagbukel National High Schoolperlita galla100% (1)
- CombinepdfDocumento9 pagineCombinepdfAnge'le Mae CISNERONessuna valutazione finora
- DSS Express User Manual - ENGDocumento175 pagineDSS Express User Manual - ENGFreddy ArcosNessuna valutazione finora
- Puerto Rico Culture, History & PoliticsDocumento3 paginePuerto Rico Culture, History & PoliticsJesusa VillanuevaNessuna valutazione finora
- Chapter 927 - DiscoveredDocumento4 pagineChapter 927 - DiscoveredAlejandro Betancourt DiazNessuna valutazione finora
- Chapter 7 Probability II Sample Space and EventsDocumento7 pagineChapter 7 Probability II Sample Space and Eventsleelee1127Nessuna valutazione finora
- Troop Meeting Plan FormDocumento1 paginaTroop Meeting Plan FormSTARTTOLOOKNessuna valutazione finora
- ĐỀ 09 và 10 thườngDocumento5 pagineĐỀ 09 và 10 thườngMai ThanhNessuna valutazione finora