Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
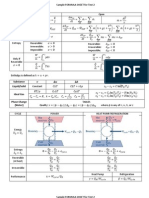
- Sample Formula Sheet For ThermodynamicsDocumento2 pagineSample Formula Sheet For Thermodynamicsmicrop_aras100% (3)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- JS 33 2013Documento14 pagineJS 33 2013dayioglub100% (1)
- DR Matin Naqvi-Design of Linear Drainage Systems-Thomas Telford Publishing (2003)Documento255 pagineDR Matin Naqvi-Design of Linear Drainage Systems-Thomas Telford Publishing (2003)Nejib GhazouaniNessuna valutazione finora
- A Review On Decision-Making Methods in Engineering Design For The Automotive IndustryDocumento27 pagineA Review On Decision-Making Methods in Engineering Design For The Automotive IndustryNejib GhazouaniNessuna valutazione finora
- 1495444517.3651road Traffic AccidentDocumento5 pagine1495444517.3651road Traffic AccidentNejib GhazouaniNessuna valutazione finora
- Bucknell Steel PTD Module Nov 22Documento80 pagineBucknell Steel PTD Module Nov 22Nejib GhazouaniNessuna valutazione finora
- LTB Part2 F14 OptDocumento15 pagineLTB Part2 F14 OptNejib GhazouaniNessuna valutazione finora
- Pallet Design Project: Team Members: Jon Dixon Matt Sacks Darrin Beam Nathan MurrayDocumento20 paginePallet Design Project: Team Members: Jon Dixon Matt Sacks Darrin Beam Nathan MurrayNejib GhazouaniNessuna valutazione finora
- Plasticity AnalysisDocumento136 paginePlasticity AnalysisNejib GhazouaniNessuna valutazione finora
- Laboratory Safety Assessment Form: Information / PostingsDocumento2 pagineLaboratory Safety Assessment Form: Information / PostingsNejib GhazouaniNessuna valutazione finora
- Machine Training Manual LSELDocumento21 pagineMachine Training Manual LSELNejib GhazouaniNessuna valutazione finora
- Advanced Strength and Applied Elasticity (4th Edition) PDFDocumento7.275 pagineAdvanced Strength and Applied Elasticity (4th Edition) PDFNejib Ghazouani0% (3)
- Chapter 1 - Construction EconomicsDocumento41 pagineChapter 1 - Construction EconomicsNejib Ghazouani50% (2)
- CM CH3 PlanningDocumento32 pagineCM CH3 PlanningNejib GhazouaniNessuna valutazione finora
- Chapt1 Overview of StaticsDocumento15 pagineChapt1 Overview of StaticsNejib GhazouaniNessuna valutazione finora
- Construction Fundamentals Study GuideDocumento68 pagineConstruction Fundamentals Study GuideNejib Ghazouani50% (2)
- Non Destructive Testing: Instruction To CandidatesDocumento2 pagineNon Destructive Testing: Instruction To CandidatesHOD MEDNessuna valutazione finora
- Ain Shams Engineering Journal: Ayoub Abdollahi, Hussein A. Mohammed, Sh.M. Vanaki, Rajnish N. SharmaDocumento8 pagineAin Shams Engineering Journal: Ayoub Abdollahi, Hussein A. Mohammed, Sh.M. Vanaki, Rajnish N. SharmaIndo-bangla MedicoNessuna valutazione finora
- Material Characterisation Study On Ramie Fibre Using DSC TGA MethodDocumento9 pagineMaterial Characterisation Study On Ramie Fibre Using DSC TGA MethodGurumurthy B RNessuna valutazione finora
- Metals HandbookDocumento33 pagineMetals HandbookAlexandre Sp50% (4)
- MRAM Processing NOZIERES PDFDocumento53 pagineMRAM Processing NOZIERES PDFGokaran Shukla100% (2)
- Microstructure of A Lead-Tin AlloyDocumento55 pagineMicrostructure of A Lead-Tin AlloyThaya GanapathyNessuna valutazione finora
- Concrete Industrial Floor Design - Engineers EdgeDocumento1 paginaConcrete Industrial Floor Design - Engineers EdgeNeil WilsnachNessuna valutazione finora
- Solid Mechanics Tracking SystemDocumento11 pagineSolid Mechanics Tracking SystemdoxoNessuna valutazione finora
- Fizica 2Documento114 pagineFizica 2Marlena NeștianNessuna valutazione finora
- Strength of Materials - Combined Stresses - Hani Aziz AmeenDocumento27 pagineStrength of Materials - Combined Stresses - Hani Aziz AmeenHani Aziz Ameen88% (8)
- Biomechanical Properties of A New Fiber-Reinforced CompositesDocumento10 pagineBiomechanical Properties of A New Fiber-Reinforced Compositesazam ahmedNessuna valutazione finora
- Data Sheet A-10: Alloy TypeDocumento3 pagineData Sheet A-10: Alloy Typemohamed AdelNessuna valutazione finora
- MAE 156A Analysis of StressDocumento46 pagineMAE 156A Analysis of StressAudrey TuNessuna valutazione finora
- 5.1. Structural Design Calculations: Job Number: 160602Documento49 pagine5.1. Structural Design Calculations: Job Number: 160602OktayNessuna valutazione finora
- Preguntas Cap 27 Manufactura ModernaDocumento2 paginePreguntas Cap 27 Manufactura ModernaJavierNessuna valutazione finora
- Kumar I 2018Documento8 pagineKumar I 2018Jhon PpNessuna valutazione finora
- Btech 2 Sem Engineering Mechanics Me 201 2017 18Documento2 pagineBtech 2 Sem Engineering Mechanics Me 201 2017 18Ashutosh IndNessuna valutazione finora
- Mohr's CircleDocumento55 pagineMohr's CircleLloyd R. PonceNessuna valutazione finora
- Pressure Vessel - Torispherical Head PDFDocumento5 paginePressure Vessel - Torispherical Head PDFGeorge_Wabag_2014Nessuna valutazione finora
- What Is The Snow (By SWIX)Documento35 pagineWhat Is The Snow (By SWIX)CyrillNessuna valutazione finora
- Wind Turbine Anchor SolutionsDocumento8 pagineWind Turbine Anchor SolutionsplatanospanosNessuna valutazione finora
- RC DESIGN-ColumnsDocumento29 pagineRC DESIGN-Columnsdilnessa azanawNessuna valutazione finora
- Tutor Marked Assignment: ECX5243 - Physical and Opto ElectronicsDocumento2 pagineTutor Marked Assignment: ECX5243 - Physical and Opto ElectronicsDK White LionNessuna valutazione finora
- Design properties of HEA profiles for S235 steel class (γ = 1.00, units = mm)Documento18 pagineDesign properties of HEA profiles for S235 steel class (γ = 1.00, units = mm)scarto08Nessuna valutazione finora
- ANSYS Mechanical APDL Fracture Analysis GuideDocumento160 pagineANSYS Mechanical APDL Fracture Analysis GuideAlejandra Hernandez Sanchez100% (4)
- Koehler ADocumento126 pagineKoehler AKavita UpadhyayNessuna valutazione finora
- A 3D Mesoscale Damage-Plasticity Approach For Masonry Structures Under Cyclic LoadingDocumento21 pagineA 3D Mesoscale Damage-Plasticity Approach For Masonry Structures Under Cyclic LoadingYU NIENessuna valutazione finora