Potrebbero piacerti anche
- Tipos de ServomecanismosDocumento2 pagineTipos de ServomecanismosFrederick Mars50% (4)
- Estructura de Un AutomatismoDocumento14 pagineEstructura de Un AutomatismoDemian Uzziel Torres Guízar100% (1)
- Investigacion ServomecanismosDocumento4 pagineInvestigacion ServomecanismosGustavo Medina50% (2)
- ServomecanismosDocumento39 pagineServomecanismosCarlos Vargas Vargas80% (5)
- Semáforo Con PLCDocumento13 pagineSemáforo Con PLCFrancisco CH100% (2)
- ServomecanismoDocumento3 pagineServomecanismojakdrive100% (1)
- Mitsubishi Melfa RV 2SDBDocumento4 pagineMitsubishi Melfa RV 2SDBdiazneto100% (1)
- Unidad 1 Electronica de Potencia y Circuitos de DisparoDocumento22 pagineUnidad 1 Electronica de Potencia y Circuitos de DisparoGustavo DymethyltryptamineNessuna valutazione finora
- Servomecanismos, Automatas, Contactores y Logica CableadaDocumento5 pagineServomecanismos, Automatas, Contactores y Logica CableadaDanilo Alfonso Rojas Mendez100% (1)
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesDocumento4 pagineTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- Direccionamiento InternoDocumento3 pagineDireccionamiento InternoEmmanuel Noé100% (2)
- Control Por RelevadoresDocumento16 pagineControl Por RelevadoresAlejandro Aldhair Peto100% (3)
- Unidad 5 PLCDocumento36 pagineUnidad 5 PLCNelson Mora SotoNessuna valutazione finora
- Reporte de Exposicion 2.6 Modos de Operacion Del PLCDocumento4 pagineReporte de Exposicion 2.6 Modos de Operacion Del PLCmayteNessuna valutazione finora
- Control ClasicoDocumento15 pagineControl ClasicoEdwin Robles OrozcoNessuna valutazione finora
- Componentes de Un Sistema NeumáticoDocumento3 pagineComponentes de Un Sistema NeumáticoJesus Max HdezNessuna valutazione finora
- Estructura de Un PLCDocumento21 pagineEstructura de Un PLCFelix RomeroNessuna valutazione finora
- Transmisores Transductores y SensoresDocumento5 pagineTransmisores Transductores y SensoresVladimir VásquezNessuna valutazione finora
- Avance. Electronica de PotenciaDocumento16 pagineAvance. Electronica de PotenciaRicardo Sanchez HernandezNessuna valutazione finora
- Capturas Semaforo Simple y Cruce (Cadesimu)Documento6 pagineCapturas Semaforo Simple y Cruce (Cadesimu)Marco Andrés TigseNessuna valutazione finora
- Lección 15 - Reguladores CA-CADocumento14 pagineLección 15 - Reguladores CA-CAKike Fernandez100% (1)
- Unidad 5 PLCDocumento24 pagineUnidad 5 PLCSergio Buenaventura Baez0% (1)
- 2.1 Convertidores CA CDDocumento30 pagine2.1 Convertidores CA CDJesus Eduardo Bordek KabralezNessuna valutazione finora
- Proyecto Final Electronica DígitalDocumento7 pagineProyecto Final Electronica Dígitalkarem lisbeth50% (2)
- 1.4 SolenoidesDocumento4 pagine1.4 SolenoidesQuick ShooterNessuna valutazione finora
- Control Digital Directo (DDC)Documento23 pagineControl Digital Directo (DDC)Jazmin Vale Ferman50% (2)
- Movimiento Del Robot Fanuc M16i Usando El Método JOINTDocumento8 pagineMovimiento Del Robot Fanuc M16i Usando El Método JOINTMaryNessuna valutazione finora
- ANTECEDENTES E HISTORIA DE LOS CONTROLADORES LÓGICOS PROGRAMABLES NuevoDocumento23 pagineANTECEDENTES E HISTORIA DE LOS CONTROLADORES LÓGICOS PROGRAMABLES NuevoeferNessuna valutazione finora
- Introduccion A Electronica de Potencia y Circuitos de DisparoDocumento45 pagineIntroduccion A Electronica de Potencia y Circuitos de Disparodaniel figueroa0% (1)
- Semaforo PLC InformeDocumento8 pagineSemaforo PLC InformeByron MendozaNessuna valutazione finora
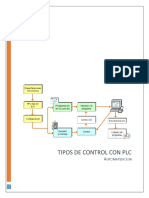
- Tipos de Control Con PLCDocumento3 pagineTipos de Control Con PLCdoggo100% (1)
- Causas de Accidentes en RobotsDocumento4 pagineCausas de Accidentes en RobotsThiago Rj100% (1)
- Módulos de Comunicación PLCDocumento9 pagineMódulos de Comunicación PLCJuan RossNessuna valutazione finora
- Actuadores HidraulicosDocumento5 pagineActuadores HidraulicosJorge Cárdenas JmzNessuna valutazione finora
- Variadores de CDDocumento4 pagineVariadores de CDRodriguez BetoNessuna valutazione finora
- Estructura de Sistemas NeumaticosDocumento22 pagineEstructura de Sistemas NeumaticosMarceloNessuna valutazione finora
- Introduccion ServomecanismosDocumento5 pagineIntroduccion ServomecanismosAlfredo Velazquez RiveraNessuna valutazione finora
- Control SupervisorioDocumento26 pagineControl SupervisorioChava Montiel100% (1)
- 4.3. Relevadores y TemporizadoresDocumento4 pagine4.3. Relevadores y TemporizadoresLópez SantiagoNessuna valutazione finora
- Convertidores de Energía EléctricaDocumento18 pagineConvertidores de Energía EléctricaEduardo Juárez100% (1)
- Circuitos de Disparo Sin AislamientoDocumento26 pagineCircuitos de Disparo Sin AislamientoEdnna Lp100% (1)
- Reporte de Practica PLCDocumento7 pagineReporte de Practica PLCGerman Rodriguez100% (1)
- Simbologia Americana y EuropeaDocumento13 pagineSimbologia Americana y EuropeaJosesin Casanova0% (1)
- Instrumentacion 5.1Documento13 pagineInstrumentacion 5.1juan pabloNessuna valutazione finora
- PLC Unidad2Documento21 paginePLC Unidad2eduardoNessuna valutazione finora
- Generación, Acondicionamiento y Distribución de Aire ComprimidoDocumento16 pagineGeneración, Acondicionamiento y Distribución de Aire ComprimidoEmigdio100% (1)
- Aplicaciones de Los RelevadoresDocumento3 pagineAplicaciones de Los RelevadoresUriel FarfanNessuna valutazione finora
- 1.6. Cálculo y Selección de Equipo NeumáticoDocumento20 pagine1.6. Cálculo y Selección de Equipo NeumáticoSkull AngelNessuna valutazione finora
- Características y Descripción Del Módulo CCP Del MicrocontroladorDocumento2 pagineCaracterísticas y Descripción Del Módulo CCP Del MicrocontroladorCarlos HernandezNessuna valutazione finora
- Calibrar Sensores y TransmisoresDocumento12 pagineCalibrar Sensores y TransmisoresLuis PonceNessuna valutazione finora
- Normativas de Diseño para Una Adecuada Implementacion de AlarmasDocumento15 pagineNormativas de Diseño para Una Adecuada Implementacion de AlarmasFernando Sánchez100% (1)
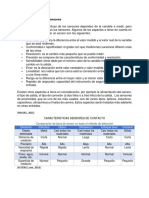
- Caracteristicas y Fabricantes de SensoresDocumento5 pagineCaracteristicas y Fabricantes de SensoresRobby Roberto PedrazaNessuna valutazione finora
- Evolución y Taxonomía Del MantenimientoDocumento8 pagineEvolución y Taxonomía Del MantenimientoLogicTutosNessuna valutazione finora
- 2.5. Circuitos Básicos de Control HidráulicoDocumento5 pagine2.5. Circuitos Básicos de Control HidráulicoLópez Santiago100% (1)
- Practica 4 PLC-Arranque en Cascada de 3 MotoresDocumento7 paginePractica 4 PLC-Arranque en Cascada de 3 MotoresKevin Alejandro0% (1)
- SERVOMECANISMODocumento18 pagineSERVOMECANISMOJunior T FarroñayNessuna valutazione finora
- SERVOMECANISMOSDocumento3 pagineSERVOMECANISMOSAdriana YáñezNessuna valutazione finora
- Servomecanismos ElectrohidraulicosDocumento28 pagineServomecanismos Electrohidraulicosisraelmh150887100% (3)
- Diseño de Un Circuito de Control de Velocidad y Sentido de Giro de Un Motor DCDocumento8 pagineDiseño de Un Circuito de Control de Velocidad y Sentido de Giro de Un Motor DCErick Joel ClaudioNessuna valutazione finora
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDa EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoValutazione: 4 su 5 stelle4/5 (4)
- 1 - Despiece Iveco Eurocargo 260E25 - CM04Documento588 pagine1 - Despiece Iveco Eurocargo 260E25 - CM04Jorge Luis Orué100% (2)
- Acometida DomiciliariaDocumento1 paginaAcometida DomiciliariaJorge Luis OruéNessuna valutazione finora
- 3 - Preparación de Documentación Técnica - NormalizaciónDocumento10 pagine3 - Preparación de Documentación Técnica - NormalizaciónJorge Luis OruéNessuna valutazione finora
- Funciones Trigonometricas InversasDocumento26 pagineFunciones Trigonometricas Inversaschicho640490% (30)
- 2 - Preparación de Documentación Técnica - Pliego de Bases y CondicionesDocumento10 pagine2 - Preparación de Documentación Técnica - Pliego de Bases y CondicionesJorge Luis OruéNessuna valutazione finora
- Lubricación - Trituradora KleemannDocumento5 pagineLubricación - Trituradora KleemannJorge Luis OruéNessuna valutazione finora
- 3 - Preparación de Documentación Técnica - NormalizaciónDocumento10 pagine3 - Preparación de Documentación Técnica - NormalizaciónJorge Luis OruéNessuna valutazione finora
- 1 - Trabajo Final Preparación de Documentación TécnicaDocumento32 pagine1 - Trabajo Final Preparación de Documentación TécnicaJorge Luis OruéNessuna valutazione finora
- TPN°2 - Valvulas y Trampas de VaporDocumento11 pagineTPN°2 - Valvulas y Trampas de VaporJorge Luis OruéNessuna valutazione finora
- TPN°2 - Valvulas y Trampas de VaporDocumento11 pagineTPN°2 - Valvulas y Trampas de VaporJorge Luis OruéNessuna valutazione finora
- Procesos de Transferencia de CalorDocumento62 pagineProcesos de Transferencia de CalorJorge Luis OruéNessuna valutazione finora
- TPN°2 - Valvulas y Trampas de VaporDocumento11 pagineTPN°2 - Valvulas y Trampas de VaporJorge Luis OruéNessuna valutazione finora
- Unidad 13 - Mediciones MagnéticasDocumento5 pagineUnidad 13 - Mediciones MagnéticasJorge Luis OruéNessuna valutazione finora
- SUB2Documento413 pagineSUB2Cesario GillasNessuna valutazione finora
- Display de 7 SegmentosDocumento3 pagineDisplay de 7 SegmentosDario AmarisNessuna valutazione finora
- 07prismas Solicitaciones DeformadaDocumento22 pagine07prismas Solicitaciones DeformadaJorge Luis OruéNessuna valutazione finora
- Funciones Trigonometricas InversasDocumento26 pagineFunciones Trigonometricas Inversaschicho640490% (30)
- Instrument Os 2Documento6 pagineInstrument Os 2Jose Sosa CojNessuna valutazione finora
- Proyecto Seguir El SolDocumento2 pagineProyecto Seguir El SolJuan Carlos Silva MamaniNessuna valutazione finora
- GM Catalogo 2007Documento236 pagineGM Catalogo 2007jorfamei100% (1)
- Taller 1Documento2 pagineTaller 1EL RINCON DEL ESTUDIANTE100% (3)
- Contrato de Compraventa Moto PDFDocumento2 pagineContrato de Compraventa Moto PDFMiki Rant Casey100% (7)
- Informe Tecnico 9Documento2 pagineInforme Tecnico 9Raul CondoriNessuna valutazione finora
- GPCR 30D - PN400/60: RastrasDocumento16 pagineGPCR 30D - PN400/60: RastrasDenis HernandezNessuna valutazione finora
- Manual - Manlift Z 45Documento79 pagineManual - Manlift Z 45Gigi MarínNessuna valutazione finora
- Changan Ficha Tecnica CS55 PLUSDocumento2 pagineChangan Ficha Tecnica CS55 PLUSVink PCNessuna valutazione finora
- Cuaderno de InformesDocumento11 pagineCuaderno de InformesrobertoNessuna valutazione finora
- Smart Parking Mexico CyspDocumento38 pagineSmart Parking Mexico CyspValente Juárez MuñozNessuna valutazione finora
- Carta de PresentaciónDocumento3 pagineCarta de PresentaciónCristina OrtegaNessuna valutazione finora
- Exploded ViewDocumento14 pagineExploded ViewRafael LilloNessuna valutazione finora
- DatosTecnicos EMV-570-6 Fijo PDFDocumento4 pagineDatosTecnicos EMV-570-6 Fijo PDFRobert Luis Canchari FernandezNessuna valutazione finora
- Siemens LP INDUSTRY Abril 2016 ConsolidadoDocumento254 pagineSiemens LP INDUSTRY Abril 2016 ConsolidadoMateo A. CortésNessuna valutazione finora
- CÁLCULO DEL RENDIMIENTO MECÁNICO DE UN MOTOR A DIESEL DE USO MARINO - v2Documento7 pagineCÁLCULO DEL RENDIMIENTO MECÁNICO DE UN MOTOR A DIESEL DE USO MARINO - v2Jissela Arcos0% (1)
- Recibo 65441467 PDFDocumento1 paginaRecibo 65441467 PDFDany Lopez Gutierrez100% (2)
- T Uide 1130Documento125 pagineT Uide 1130Edna Maria Amaya BuseNessuna valutazione finora
- Tipos de Carroceria AutobusesDocumento6 pagineTipos de Carroceria AutobusesLUIS FERNANDO GUIJARRO MOLINANessuna valutazione finora
- Motor Sincrno de Imanes PermanentesDocumento8 pagineMotor Sincrno de Imanes PermanentesJuan Salvador CastañedaNessuna valutazione finora
- ETiempo de InyeccionDocumento26 pagineETiempo de InyeccionvicuNessuna valutazione finora
- BDL71 FSTDocumento2 pagineBDL71 FSTDionicio ChavezNessuna valutazione finora
- Instrucciones Generales de ReparaciónDocumento1 paginaInstrucciones Generales de Reparaciónjrincon26Nessuna valutazione finora
- Capitulo 8Documento18 pagineCapitulo 8Luis BirminghanNessuna valutazione finora
- FT Mexlub Diesel Oil Sae 50 Api CF CF 2 Series 3Documento1 paginaFT Mexlub Diesel Oil Sae 50 Api CF CF 2 Series 3Tavo DiazNessuna valutazione finora
- Presentacion Cajas Auto FinalDocumento10 paginePresentacion Cajas Auto FinalManuel MahechaNessuna valutazione finora
- Torre de Enfriamiento Especificaciones TecnicasDocumento18 pagineTorre de Enfriamiento Especificaciones TecnicasMariana Castillo MolinaNessuna valutazione finora
- Laboratorio de Prácticas No. 3 A Generadores de CCDocumento36 pagineLaboratorio de Prácticas No. 3 A Generadores de CCJohan SabanNessuna valutazione finora
- 01 Manual Servicio TVS 100 Sport ELS - KLS 13-01-2021Documento27 pagine01 Manual Servicio TVS 100 Sport ELS - KLS 13-01-2021Andrex Feliphe Henao100% (2)
- TendioDocumento1 paginaTendioLeider CarlNessuna valutazione finora
- LiDAR Instructions With ResponsesDocumento4 pagineLiDAR Instructions With ResponsesBernie RivasNessuna valutazione finora
- Seat ToledoDocumento264 pagineSeat ToledoMau AlvarezNessuna valutazione finora
- MjklkñolDocumento2 pagineMjklkñolCamilo CamiloNessuna valutazione finora