Potrebbero piacerti anche
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDa EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNessuna valutazione finora
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenDa EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenValutazione: 4 su 5 stelle4/5 (2)
- Tutorial 5Documento1 paginaTutorial 5AJAY MEENANessuna valutazione finora
- Solar Irrigation SystemDocumento18 pagineSolar Irrigation SystemHarishwar ReddyNessuna valutazione finora
- Hydraulics and Hydraulic Machinery 2009 JNTUK QUESTION PAPERDocumento8 pagineHydraulics and Hydraulic Machinery 2009 JNTUK QUESTION PAPERhimabindugvsd71Nessuna valutazione finora
- Solar Powered Water Pumping Systems: AbstractDocumento4 pagineSolar Powered Water Pumping Systems: AbstractbalaNessuna valutazione finora
- Assignment-6 Solutions - FinalDocumento8 pagineAssignment-6 Solutions - FinalmaheshNessuna valutazione finora
- Image Analysis Method For Quantifying Snow Losses On PV SystemsDocumento7 pagineImage Analysis Method For Quantifying Snow Losses On PV SystemsJennifer BraidNessuna valutazione finora
- Sag and Tension of Transmission and Distribution LinesDocumento2 pagineSag and Tension of Transmission and Distribution Linesjob_pNessuna valutazione finora
- 1502957542lectrure 9 10 KUETDocumento26 pagine1502957542lectrure 9 10 KUETAnikaNessuna valutazione finora
- Francis Turbine Test RigDocumento4 pagineFrancis Turbine Test RigAditya SinghNessuna valutazione finora
- Sample 22289 PDFDocumento16 pagineSample 22289 PDFVarun DuggalNessuna valutazione finora
- Advanced Power System UNIT II - Part 1 of 2Documento53 pagineAdvanced Power System UNIT II - Part 1 of 2Jäšïm Üśmäñï100% (1)
- PV Based Grid Connected, Standalone and Pumping SystemDocumento48 paginePV Based Grid Connected, Standalone and Pumping SystemparthichristoNessuna valutazione finora
- Renovation Modernization and Uprating of Hydro Power StationsDocumento5 pagineRenovation Modernization and Uprating of Hydro Power StationsAbhijeet SinghNessuna valutazione finora
- ZigZag Transformer Connection Overview - EEPDocumento11 pagineZigZag Transformer Connection Overview - EEPJyoti Singh100% (1)
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocumento6 pagineDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNessuna valutazione finora
- RET - PV TECHNOLOGY - L7-BasicDocumento12 pagineRET - PV TECHNOLOGY - L7-BasicObada Ar-ruzziNessuna valutazione finora
- Aed Unit3Documento68 pagineAed Unit3Anser Pasha100% (1)
- A Refined HVDC Control SystemDocumento10 pagineA Refined HVDC Control Systemshawnr7376Nessuna valutazione finora
- UPFC (Detailed Model) - MATLAB & Simulink Example - MathWorks BeneluxDocumento3 pagineUPFC (Detailed Model) - MATLAB & Simulink Example - MathWorks BeneluxdonnyNessuna valutazione finora
- Solar Inverter String Design CalculationsDocumento4 pagineSolar Inverter String Design Calculationshammad engineeringNessuna valutazione finora
- VSC Course Lecture2Documento27 pagineVSC Course Lecture2eng7senNessuna valutazione finora
- Solar EnergyDocumento30 pagineSolar EnergyJatin Sharma cse 20Nessuna valutazione finora
- Sizing of Power Cables For Circuit Breaker Controlled Feeders Part 2Documento8 pagineSizing of Power Cables For Circuit Breaker Controlled Feeders Part 2bpsrichardNessuna valutazione finora
- 007 Kaplan 10 PaginasDocumento11 pagine007 Kaplan 10 PaginasricardoNessuna valutazione finora
- Harmonic Resonance During Energizing Primary Restorative Transmission SystemsDocumento14 pagineHarmonic Resonance During Energizing Primary Restorative Transmission SystemsLuKas21cNessuna valutazione finora
- Levelling Alignment: Levelling, Alignment and Centering of Suspended Type Vertical MachineDocumento6 pagineLevelling Alignment: Levelling, Alignment and Centering of Suspended Type Vertical MachineSajid AkhterNessuna valutazione finora
- SMA Catalogo 2010 - 11 - en PDFDocumento222 pagineSMA Catalogo 2010 - 11 - en PDFluca2527Nessuna valutazione finora
- AC-DC & DC-DC Converters For DC Motor Drives PDFDocumento8 pagineAC-DC & DC-DC Converters For DC Motor Drives PDFaswardiNessuna valutazione finora
- DC Machine DesignDocumento25 pagineDC Machine DesignJatin PradhanNessuna valutazione finora
- 110kv Sagtension Calculation 1 PDF FreeDocumento13 pagine110kv Sagtension Calculation 1 PDF FreeAnonymous 5XvUbWynnNessuna valutazione finora
- 534621ijsetr1142 259Documento7 pagine534621ijsetr1142 259Hannu PortilloNessuna valutazione finora
- POWER SYSTEMS - 1 - QuestionsDocumento7 paginePOWER SYSTEMS - 1 - QuestionsB.Neelakanteshwar RaoNessuna valutazione finora
- On FACTSDocumento33 pagineOn FACTSAravind Babu100% (1)
- Transmission Line LoadabilityDocumento6 pagineTransmission Line LoadabilityUsama AhmedNessuna valutazione finora
- On Load Tap ChangerDocumento2 pagineOn Load Tap Changerashish_patel111Nessuna valutazione finora
- Single Line To Ground FaultDocumento12 pagineSingle Line To Ground Faultluhusapa-1Nessuna valutazione finora
- Voltage ControlDocumento25 pagineVoltage Controlbenson215100% (1)
- Power System Analysis Lab1-LEYBOLD EQUIPMENT INSPECTION & TRANSIENT MEASUREMENTDocumento15 paginePower System Analysis Lab1-LEYBOLD EQUIPMENT INSPECTION & TRANSIENT MEASUREMENTMalith DeemanthaNessuna valutazione finora
- Chapter 1 Appeal DraftDocumento10 pagineChapter 1 Appeal DraftJessie JulongbayanNessuna valutazione finora
- Power System Protection AssignmentDocumento26 paginePower System Protection AssignmentMohsin AhsanNessuna valutazione finora
- Simulation in Turbine GoverningDocumento4 pagineSimulation in Turbine GoverningChannaNessuna valutazione finora
- Energy ManagementDocumento55 pagineEnergy ManagementNjitnumNessuna valutazione finora
- Power System Restoration WithDocumento5 paginePower System Restoration WithSandhya ShyamasundarNessuna valutazione finora
- Basic Structure of A Power SystemDocumento9 pagineBasic Structure of A Power Systembiruke6Nessuna valutazione finora
- ECE551 - Homework 3 Solution - Spring 2019Documento9 pagineECE551 - Homework 3 Solution - Spring 2019JAY CHHEDANessuna valutazione finora
- Curve Graphing in MS Excel and ApplicationsDocumento23 pagineCurve Graphing in MS Excel and ApplicationsShashi TapsiNessuna valutazione finora
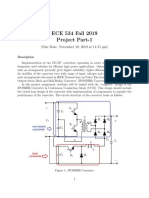
- ECE 534 Project 1 F19Documento6 pagineECE 534 Project 1 F19JAY CHHEDANessuna valutazione finora
- Nepal College of Information Technology: Hydropower Project - PUWA KHOLA 1, IlamDocumento18 pagineNepal College of Information Technology: Hydropower Project - PUWA KHOLA 1, IlamAnurag JoshiNessuna valutazione finora
- InverterDocumento23 pagineInverterBittu Kumar SinhaNessuna valutazione finora
- Bhel ReportDocumento13 pagineBhel ReportAtul TripathiNessuna valutazione finora
- CFD Analysis of Pelton TurbineDocumento4 pagineCFD Analysis of Pelton TurbineSanam ManutdNessuna valutazione finora
- Temporary Overvoltages Following Transformer EnergizingDocumento3 pagineTemporary Overvoltages Following Transformer EnergizingLuiz_F_A_ViannaNessuna valutazione finora
- SSR in Power SystemsDocumento29 pagineSSR in Power SystemsSrinivas ReddyNessuna valutazione finora
- Midway Report: Project Semester: Study of 220KV Substation and SLDCDocumento15 pagineMidway Report: Project Semester: Study of 220KV Substation and SLDCdamanpreet singhNessuna valutazione finora
- Nrel PV String To 3-Phase Inverter With The Highest V CapabilitiesDocumento38 pagineNrel PV String To 3-Phase Inverter With The Highest V CapabilitieshaniNessuna valutazione finora
- What Is Arcing Ground PhenomenaDocumento3 pagineWhat Is Arcing Ground PhenomenaAbhisht YadavNessuna valutazione finora
- Power OscillationsDocumento54 paginePower OscillationsVijay RohillaNessuna valutazione finora
- Chapter 4 Current Limiting ReactorDocumento2 pagineChapter 4 Current Limiting Reactorprabhjot singh1Nessuna valutazione finora
- Gate Aerospace Question Papers (2014)Documento17 pagineGate Aerospace Question Papers (2014)AnandhammNessuna valutazione finora
- 01-2 Electrical VoltageDocumento4 pagine01-2 Electrical Voltageprabhjot singh1Nessuna valutazione finora
- Gate Aerospace Question Papers (2014)Documento17 pagineGate Aerospace Question Papers (2014)AnandhammNessuna valutazione finora
- 01-2 Electrical VoltageDocumento4 pagine01-2 Electrical Voltageprabhjot singh1Nessuna valutazione finora
- A.M.I.E: The Institution of Engineers (India)Documento8 pagineA.M.I.E: The Institution of Engineers (India)prabhjot singh1Nessuna valutazione finora
- Chapter Protective RelayDocumento2 pagineChapter Protective Relayprabhjot singh1Nessuna valutazione finora
- 5 DrivesDocumento21 pagine5 Drivesprabhjot singh1Nessuna valutazione finora
- 07403010003Documento1 pagina07403010003prabhjot singh1Nessuna valutazione finora
- El403 02012013Documento1 paginaEl403 02012013prabhjot singh1Nessuna valutazione finora
- Chapter 12 Ceramic MaterialsDocumento3 pagineChapter 12 Ceramic Materialsprabhjot singh1Nessuna valutazione finora
- 07403010002Documento1 pagina07403010002prabhjot singh1Nessuna valutazione finora
- El Vol 69 p4 February 1989Documento32 pagineEl Vol 69 p4 February 1989prabhjot singh1Nessuna valutazione finora
- AD302 Materials Science and Engineering 02Documento2 pagineAD302 Materials Science and Engineering 02prabhjot singh1Nessuna valutazione finora
- GATE Chemical Question Paper 2013 PDFDocumento16 pagineGATE Chemical Question Paper 2013 PDFAayush AgarwalNessuna valutazione finora
- Amie Electrical Engineering Multipe ChoiceDocumento43 pagineAmie Electrical Engineering Multipe Choiceprabhjot singh194% (18)
- Gate TF Textile Engineering and Fibre Science 2013Documento12 pagineGate TF Textile Engineering and Fibre Science 2013prabhjot singh1Nessuna valutazione finora
- Xe 2014Documento37 pagineXe 2014HolysterBob GasconNessuna valutazione finora
- Ar:Architecture and Planning: - Download FromDocumento12 pagineAr:Architecture and Planning: - Download FromArif NezamiNessuna valutazione finora
- PH2013 Physics Gate 2013 Question PapaeraDocumento13 paginePH2013 Physics Gate 2013 Question PapaeraAnonymous 8pCXXsNessuna valutazione finora
- GATE Life Sciences Question Paper 2013Documento27 pagineGATE Life Sciences Question Paper 2013Santhosh KalashNessuna valutazione finora
- CIVIL ENGINEERING Gate 2013 Final With SolutionsDocumento17 pagineCIVIL ENGINEERING Gate 2013 Final With SolutionsqwertyingNessuna valutazione finora
- Gate 2013Documento13 pagineGate 2013DeepakNessuna valutazione finora
- Bt:Biotechnology: General InstructionsDocumento13 pagineBt:Biotechnology: General Instructionsapi-246230881Nessuna valutazione finora
- Gate Ce 2009Documento13 pagineGate Ce 2009prabhjot singh1Nessuna valutazione finora
- Gate Ce 2011Documento14 pagineGate Ce 2011prabhjot singh1Nessuna valutazione finora
- Ae:Aerospace Engineering: General InstructionsDocumento20 pagineAe:Aerospace Engineering: General InstructionsJosin JoseNessuna valutazione finora
- Gate Ag 2013Documento12 pagineGate Ag 2013prabhjot singh1Nessuna valutazione finora
- Gate Ce 2010Documento16 pagineGate Ce 2010prabhjot singh1Nessuna valutazione finora
- GATE 2012 Civil Engineering Question PaperDocumento16 pagineGATE 2012 Civil Engineering Question PaperSomesh SshNessuna valutazione finora
- X-Plane Mobile ManualDocumento66 pagineX-Plane Mobile ManualRafael MunizNessuna valutazione finora
- Analysis and Design of Telecommunication Tower Using Different Truss System by ETab SoftwareDocumento12 pagineAnalysis and Design of Telecommunication Tower Using Different Truss System by ETab SoftwareEditor IJTSRDNessuna valutazione finora
- Dynamic Force AnalysisDocumento13 pagineDynamic Force AnalysisJakesNessuna valutazione finora
- Pneumatic Conveying of Bulk Solids PDFDocumento231 paginePneumatic Conveying of Bulk Solids PDFCarloLopez100% (2)
- Fisher Paykel SmartLoad Dryer DEGX1, DGGX1 Service ManualDocumento70 pagineFisher Paykel SmartLoad Dryer DEGX1, DGGX1 Service Manualjandre61100% (2)
- API2000 Tank Venting CalcsDocumento5 pagineAPI2000 Tank Venting Calcsruhul01Nessuna valutazione finora
- Cleats CatalogueDocumento73 pagineCleats Cataloguefire123123Nessuna valutazione finora
- Murata Data Caps ESR ESLDocumento6 pagineMurata Data Caps ESR ESLecl_manNessuna valutazione finora
- Slip Rings: SRI085 V100 - XX - XX - Xxx1XxDocumento3 pagineSlip Rings: SRI085 V100 - XX - XX - Xxx1XxMatheus Henrique MattiaNessuna valutazione finora
- Unit 07 Self-Test Chemistry Self TestDocumento2 pagineUnit 07 Self-Test Chemistry Self TestOluwatusin Ayo OluwatobiNessuna valutazione finora
- Fongs ProgrammerDocumento5 pagineFongs ProgrammerPankaj PolaraNessuna valutazione finora
- Formula Sheet: Basic Trigonometric IdentitiesDocumento4 pagineFormula Sheet: Basic Trigonometric Identitieschetan temkarNessuna valutazione finora
- Data Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchDocumento6 pagineData Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchMd Rubaiyat BhuiyanNessuna valutazione finora
- Three - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureDocumento6 pagineThree - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureWenjun ZhangNessuna valutazione finora
- Epson WorkForce Pro WF-C878-879RDocumento8 pagineEpson WorkForce Pro WF-C878-879Rsales2 HARMONYSISTEMNessuna valutazione finora
- PythagorasDocumento109 paginePythagorasaditya00012Nessuna valutazione finora
- Carel MxproDocumento64 pagineCarel MxproPreot Andreana CatalinNessuna valutazione finora
- Zener Barrier: 2002 IS CatalogDocumento1 paginaZener Barrier: 2002 IS CatalogabcNessuna valutazione finora
- Index Terms LinksDocumento31 pagineIndex Terms Linksdeeptiwagle5649Nessuna valutazione finora
- Chapter 3 Selections - WhiteBackgroundDocumento67 pagineChapter 3 Selections - WhiteBackgroundyowzaNessuna valutazione finora
- MODULAR QUIZ - 57 - Steel DesignDocumento9 pagineMODULAR QUIZ - 57 - Steel DesignCornelio J. FernandezNessuna valutazione finora
- Business Process MappingDocumento14 pagineBusiness Process MappinghanxinNessuna valutazione finora
- K20 Engine Control Module X3 (Lt4) Document ID# 4739106Documento3 pagineK20 Engine Control Module X3 (Lt4) Document ID# 4739106Data TécnicaNessuna valutazione finora
- Stability Analysis of Steel Storage Rack Structures PDFDocumento7 pagineStability Analysis of Steel Storage Rack Structures PDFFabian Flemin BahamondeNessuna valutazione finora
- Meteorology Konu Konu Ayrılmış SorularDocumento278 pagineMeteorology Konu Konu Ayrılmış Sorularjames100% (1)
- Parts Catalog: Parts - Sales - Service - RestorationsDocumento32 pagineParts Catalog: Parts - Sales - Service - RestorationsJean BelzilNessuna valutazione finora
- Lecture 8cDocumento29 pagineLecture 8cs_paraisoNessuna valutazione finora
- Fitting Fundamentals: For SewersDocumento21 pagineFitting Fundamentals: For SewersLM_S_S60% (5)
- Stellar Evolution SimulationDocumento2 pagineStellar Evolution Simulationncl12142Nessuna valutazione finora