Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Equilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsDocumento24 pagineEquilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsAtef NazNessuna valutazione finora
- Caterpillar 914GDocumento28 pagineCaterpillar 914GForomaquinas100% (3)
- BTS Training Fiber Optic Advanced SplicingDocumento5 pagineBTS Training Fiber Optic Advanced Splicingjama99Nessuna valutazione finora
- Thu Thiem Tunnel Construction - Sequence - Immersed - Tunnel PDFDocumento36 pagineThu Thiem Tunnel Construction - Sequence - Immersed - Tunnel PDFThông PhanNessuna valutazione finora
- Iraqi Code for Reinforced Concrete StructuresDocumento71 pagineIraqi Code for Reinforced Concrete Structuresmamandawe50% (2)
- RCC BEAM DESIGN AND SERVICEABILITYDocumento15 pagineRCC BEAM DESIGN AND SERVICEABILITYprashmceNessuna valutazione finora
- NTP35N15 Power MOSFET Features and SpecificationsDocumento7 pagineNTP35N15 Power MOSFET Features and SpecificationsChristine GomezNessuna valutazione finora
- Technical Presentation - Arik Ethan Kinajil (25231)Documento5 pagineTechnical Presentation - Arik Ethan Kinajil (25231)Arik EthanNessuna valutazione finora
- Lesson 7: Cylinders: Basic Hydraulic SystemsDocumento12 pagineLesson 7: Cylinders: Basic Hydraulic Systemsoscar el carevergaNessuna valutazione finora
- Hit-Re 500 With Hit-V Has RodsDocumento3 pagineHit-Re 500 With Hit-V Has RodsMKNessuna valutazione finora
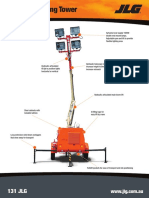
- JLG Lighting Tower 6308AN Series II 20150907Documento2 pagineJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Nessuna valutazione finora
- PML Rev-I Preferred Manufacturer List for PT Pertamina EPDocumento12 paginePML Rev-I Preferred Manufacturer List for PT Pertamina EPAndreas Schlager100% (1)
- QADocumento170 pagineQASudama KhatriNessuna valutazione finora
- 03.job Specification Instrumentaton PDFDocumento27 pagine03.job Specification Instrumentaton PDFshareyhouNessuna valutazione finora
- Tabla 1 Engine ControlDocumento2 pagineTabla 1 Engine Controljulio montenegroNessuna valutazione finora
- Online Institute Reporting Slip of The Application Number - 200310422837 PDFDocumento1 paginaOnline Institute Reporting Slip of The Application Number - 200310422837 PDFRohith RohanNessuna valutazione finora
- Niveau S Longrine Type Pou05-S Section 20x25: A-A B-B C-C D-DDocumento1 paginaNiveau S Longrine Type Pou05-S Section 20x25: A-A B-B C-C D-DAWOUNANGNessuna valutazione finora
- Stress-Strain Behaviour of Steel-Fibre-Reinforced Recycled Aggregate Concrete Under Axial TensionDocumento16 pagineStress-Strain Behaviour of Steel-Fibre-Reinforced Recycled Aggregate Concrete Under Axial TensionAndrucruz CruzNessuna valutazione finora
- Network What To ReadDocumento2 pagineNetwork What To ReadTauseef AhmadNessuna valutazione finora
- 06 HVAC Plumbing PDFDocumento727 pagine06 HVAC Plumbing PDFTamNessuna valutazione finora
- Module 1: Introduction Introduction To Tribology: Fig. 1.1: Carbon Graphite SealDocumento18 pagineModule 1: Introduction Introduction To Tribology: Fig. 1.1: Carbon Graphite Sealbansalmohit01Nessuna valutazione finora
- Easygen-3000 Series (Package P1) Genset Control: InterfaceDocumento102 pagineEasygen-3000 Series (Package P1) Genset Control: InterfacejinameNessuna valutazione finora
- 8 Ways To Achieve Efficient Combustion in Marine EnginesDocumento10 pagine8 Ways To Achieve Efficient Combustion in Marine EnginestomNessuna valutazione finora
- 25kl SS Tank EstimateDocumento1 pagina25kl SS Tank EstimateRaja ManiNessuna valutazione finora
- Procedure Installation of Lighting - LABUAN BAJO PDFDocumento6 pagineProcedure Installation of Lighting - LABUAN BAJO PDFWika Djoko ONessuna valutazione finora
- Guidelines For Planning Childcare Centers & Playground DesignDocumento15 pagineGuidelines For Planning Childcare Centers & Playground Design105auco100% (1)
- Node diagnostics report for RBS6601WDocumento9 pagineNode diagnostics report for RBS6601WWilson DiazNessuna valutazione finora
- FGGDocumento12 pagineFGGSridharan VenkatNessuna valutazione finora
- STP GuideDocumento2 pagineSTP GuideFlow Dynamics IndiaNessuna valutazione finora
- Fem Question PaperDocumento4 pagineFem Question PaperARSNessuna valutazione finora