Potrebbero piacerti anche
- Over Current Relay NotesDocumento10 pagineOver Current Relay Noteskriitka100% (1)
- Deepa S Kumar Powergrid Corporation of India LTDDocumento44 pagineDeepa S Kumar Powergrid Corporation of India LTDiam@scribd123Nessuna valutazione finora
- Numerical Overcurrent Protection Relay - Argus 1Documento4 pagineNumerical Overcurrent Protection Relay - Argus 1sulemanchNessuna valutazione finora
- PSM and TMS Settings Calculation of A RelayDocumento20 paginePSM and TMS Settings Calculation of A RelayblaagicaNessuna valutazione finora
- Electrical relay types and characteristicsDocumento5 pagineElectrical relay types and characteristicsSLDC DDNessuna valutazione finora
- Commissioning Test Report For Circuit Breaker SiteDocumento3 pagineCommissioning Test Report For Circuit Breaker SiteGuru MishraNessuna valutazione finora
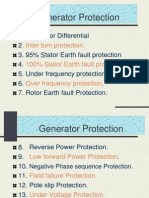
- Generator ProtectionDocumento10 pagineGenerator ProtectionVirendra SinghNessuna valutazione finora
- Vacuum Circuit Breaker Test ReportDocumento13 pagineVacuum Circuit Breaker Test ReportRajeev babbarNessuna valutazione finora
- Stator Earth Fault in 200MW Generator-A Case StudyDocumento5 pagineStator Earth Fault in 200MW Generator-A Case StudylrpatraNessuna valutazione finora
- H15B PLUS-2 Parts ManualDocumento158 pagineH15B PLUS-2 Parts ManualАлексей50% (2)
- Transformer FormulasDocumento1 paginaTransformer FormulasHVACHEATLOSSNessuna valutazione finora
- GeneratorDocumento38 pagineGeneratorHari Krishna.M100% (1)
- SOP for 3x625 Kva DGs with Auto Sync PanelDocumento2 pagineSOP for 3x625 Kva DGs with Auto Sync PanelAshish M50% (2)
- Generator Synchronization Procedure in Power PlantDocumento2 pagineGenerator Synchronization Procedure in Power PlantKanagaraj Ravi100% (2)
- Barrels & Actions by Harold HoffmanDocumento238 pagineBarrels & Actions by Harold HoffmanNorm71% (7)
- SOP - DG SynchronizatiDocumento3 pagineSOP - DG SynchronizatiFrank RogerNessuna valutazione finora
- Gen ProtectionDocumento33 pagineGen Protectionhafiz_hazreen100% (1)
- Magnetizing CurrentDocumento4 pagineMagnetizing CurrentSureshraja9977Nessuna valutazione finora
- Through The CBCT. But U-Turn Back Through The CBCT" and Then Earth It at The Earthing BarDocumento2 pagineThrough The CBCT. But U-Turn Back Through The CBCT" and Then Earth It at The Earthing BarAshishrock Singh100% (1)
- Auxiliary RelaysDocumento4 pagineAuxiliary Relaysarsalanhamid100% (1)
- Power Transformer ProtectionDocumento27 paginePower Transformer ProtectionrameshsmeNessuna valutazione finora
- Protection & Coordination - Motor ProtectionDocumento34 pagineProtection & Coordination - Motor ProtectionAdelChNessuna valutazione finora
- MPR300Documento4 pagineMPR300KUNALJAY100% (1)
- Bus TransferDocumento2 pagineBus TransferBiswajit BiswasNessuna valutazione finora
- Rigid PavementDocumento100 pagineRigid PavementJAY GANDHI100% (1)
- Generator Relay Protection Setting Calculation REV 1.0Documento18 pagineGenerator Relay Protection Setting Calculation REV 1.0SreekanthMylavarapuNessuna valutazione finora
- Motor Protection SiemensDocumento10 pagineMotor Protection SiemensViviane MaiaNessuna valutazione finora
- TEST REPORT SUMMARY FOR REB670 RELAYDocumento3 pagineTEST REPORT SUMMARY FOR REB670 RELAYArif AhmedNessuna valutazione finora
- Power Transformer Tests Guide - Voltage Ratio, Turns Ratio, Polarity Vector GroupDocumento7 paginePower Transformer Tests Guide - Voltage Ratio, Turns Ratio, Polarity Vector GroupsupermannonNessuna valutazione finora
- Tan Delta Test On 6KV HT MotorDocumento6 pagineTan Delta Test On 6KV HT MotorSellappan MuthusamyNessuna valutazione finora
- Negative Phase Sequence ProtectionDocumento15 pagineNegative Phase Sequence ProtectionThirumalNessuna valutazione finora
- HT MotorDocumento25 pagineHT MotorgaladrialNessuna valutazione finora
- Power System Protection SchemesDocumento135 paginePower System Protection SchemesReghukumar KNessuna valutazione finora
- Commissioning Numerical Relays GuideDocumento24 pagineCommissioning Numerical Relays Guidelankesh_db100% (1)
- Chapter 3 PS, PSM, TmsDocumento32 pagineChapter 3 PS, PSM, Tmskishansai100% (2)
- P 220 Testing ProcedureDocumento8 pagineP 220 Testing ProcedureMuthu Kumar100% (2)
- Notes On Testing and Maintenance of Electrical MachinesDocumento25 pagineNotes On Testing and Maintenance of Electrical Machinesdattatray kulkarni50% (2)
- Transformer TroubleshootingDocumento12 pagineTransformer TroubleshootingShahadat Hossain75% (4)
- Continue To Provide Torque When Stalled)Documento5 pagineContinue To Provide Torque When Stalled)saiNessuna valutazione finora
- Why LT Motors Are Delta Connected and HT Motors Are Star Connected - 4Documento2 pagineWhy LT Motors Are Delta Connected and HT Motors Are Star Connected - 4Shah JayNessuna valutazione finora
- What is a Transformer and How Does it WorkDocumento48 pagineWhat is a Transformer and How Does it WorkPraveen ChandranNessuna valutazione finora
- Differential RelayDocumento27 pagineDifferential RelaybijoyNessuna valutazione finora
- Interview Questions For Eee StudentsDocumento11 pagineInterview Questions For Eee StudentsAli ZafarNessuna valutazione finora
- Testing of HT MotorsDocumento16 pagineTesting of HT MotorsSam50% (4)
- CT Testing ProceduresDocumento3 pagineCT Testing ProceduresPrabagaran PrtNessuna valutazione finora
- Electrical Interview Questions Answers EEE KenyaDocumento14 pagineElectrical Interview Questions Answers EEE KenyaAnonymous m8oCtJBNessuna valutazione finora
- Motor Protection Settings GuideDocumento20 pagineMotor Protection Settings Guideashumanu427Nessuna valutazione finora
- Neutral Grounding of GeneratorDocumento3 pagineNeutral Grounding of GeneratorPabloAlv100% (1)
- ElsafeDocumento324 pagineElsafenavinchopra1986Nessuna valutazione finora
- Start Inhibit FunctionDocumento11 pagineStart Inhibit Functionlimkokchiang809Nessuna valutazione finora
- Experiment 2: Level Transmitter CalibrationDocumento13 pagineExperiment 2: Level Transmitter CalibrationMuhammad FawwazNessuna valutazione finora
- Auto Reclose TestingDocumento2 pagineAuto Reclose TestingSanjin Čamur100% (1)
- LT Panel Pre-Commissioning TestsDocumento42 pagineLT Panel Pre-Commissioning TestsDhivagar Namakkal100% (1)
- BatteryDocumento8 pagineBatteryAtulya Kumar Naik67% (3)
- Induction GeneratorDocumento12 pagineInduction GeneratorSumaira SaifNessuna valutazione finora
- Expt-3 Various Methods of Braking of 3-Ph IMDocumento6 pagineExpt-3 Various Methods of Braking of 3-Ph IMAnwesha pradhan50% (2)
- 11kV Capacitor Technical SpecificationDocumento35 pagine11kV Capacitor Technical SpecificationJAY PARIKH100% (1)
- Electrical Engineering Interview QuestionsDocumento17 pagineElectrical Engineering Interview QuestionsEdisonNessuna valutazione finora
- Selection of Power Rating of MotorDocumento6 pagineSelection of Power Rating of MotorSEC ExamcellNessuna valutazione finora
- Power System Protection: Instructor: Dr. Zahid MehmoodDocumento37 paginePower System Protection: Instructor: Dr. Zahid MehmoodMuhammad Shaheer AftabNessuna valutazione finora
- Principle of Relay - CH02Documento39 paginePrinciple of Relay - CH02engidawabel100% (1)
- Protection Devices Lec09Documento15 pagineProtection Devices Lec09youssef JekaNessuna valutazione finora
- TRANSFORMERS PROTECTIONDocumento54 pagineTRANSFORMERS PROTECTIONPraveen DubeyNessuna valutazione finora
- SGP 4Documento10 pagineSGP 4BantiNessuna valutazione finora
- Casio User Manual FX 100sDocumento61 pagineCasio User Manual FX 100slux_kingNessuna valutazione finora
- The Economic Transformation Programme - Chapter 6Documento40 pagineThe Economic Transformation Programme - Chapter 6Encik AnifNessuna valutazione finora
- 7UM6 Gen Prot-Schemes EDocumento10 pagine7UM6 Gen Prot-Schemes EruslaninstNessuna valutazione finora
- A Practical Guide To Earth Resistance TestingDocumento41 pagineA Practical Guide To Earth Resistance Testingcabrito_lightNessuna valutazione finora
- Power System StabilityDocumento13 paginePower System StabilityAdemEfeNessuna valutazione finora
- SIP-2008 02 Overview Applications enDocumento56 pagineSIP-2008 02 Overview Applications enoohckyNessuna valutazione finora
- Busprot 3Documento57 pagineBusprot 3Jeffrey S CadmanNessuna valutazione finora
- Accuracy of Fault Current DC Component Calculation in Multi-Machine Power SystemsDocumento1 paginaAccuracy of Fault Current DC Component Calculation in Multi-Machine Power SystemsoohckyNessuna valutazione finora
- 6F2S0814Documento332 pagine6F2S0814oohckyNessuna valutazione finora
- PSD60-2R: Operation ManualDocumento22 paginePSD60-2R: Operation ManualOscar SantanaNessuna valutazione finora
- Mic 2282Documento10 pagineMic 2282mariusz sNessuna valutazione finora
- Brake SystemDocumento19 pagineBrake SystemSudarshan NepalNessuna valutazione finora
- UNIT-1 Introduction To Emi: A Arunkumar GudivadaDocumento47 pagineUNIT-1 Introduction To Emi: A Arunkumar GudivadaBhagya bhagiNessuna valutazione finora
- 11.numerical DifferentiationDocumento20 pagine11.numerical DifferentiationAbdulselam AbdurahmanNessuna valutazione finora
- Grade 8 Diagnostic Test 2022-2023Documento2 pagineGrade 8 Diagnostic Test 2022-2023JennyNessuna valutazione finora
- A Conjunction Is The Glue That Holds WordsDocumento2 pagineA Conjunction Is The Glue That Holds WordsYamson MillerJrNessuna valutazione finora
- Connective TissueDocumento6 pagineConnective TissuecrtgyhujikNessuna valutazione finora
- IMME19 Schedule PDFDocumento39 pagineIMME19 Schedule PDFVikram JainNessuna valutazione finora
- Antenna Specifications Electrical PropertiesDocumento2 pagineAntenna Specifications Electrical PropertiesLuis Adolfo Mazini RodriguesNessuna valutazione finora
- Pines City National High School Science 10 Quarter 2 Week 1 Answer SheetsDocumento8 paginePines City National High School Science 10 Quarter 2 Week 1 Answer SheetsAaron BalsaNessuna valutazione finora
- Presentation - Ftserver Gen 10 Slide LibraryDocumento25 paginePresentation - Ftserver Gen 10 Slide LibraryJose AndresNessuna valutazione finora
- Cork Properties Capabilities and ApplicationsDocumento22 pagineCork Properties Capabilities and ApplicationsVijay AnandNessuna valutazione finora
- Tut 5. Two-Column Hammerhead Pier PDFDocumento35 pagineTut 5. Two-Column Hammerhead Pier PDFOscar Varon BarbosaNessuna valutazione finora
- Applications of Redox ReactionsDocumento50 pagineApplications of Redox ReactionsMlamuli MlarhNessuna valutazione finora
- Class 9 Sample Paper 2020-21Documento3 pagineClass 9 Sample Paper 2020-21sasta jiNessuna valutazione finora
- SteganographyDocumento13 pagineSteganographyIgloo JainNessuna valutazione finora
- Test 2Documento16 pagineTest 2edwardNessuna valutazione finora
- BS 2995-1966 PDFDocumento15 pagineBS 2995-1966 PDF윤규섭Nessuna valutazione finora
- Er DiagramsDocumento20 pagineEr DiagramsMatthew BloomfieldNessuna valutazione finora
- Operation & Service Manual For Cable Tensiometer: SeriesDocumento28 pagineOperation & Service Manual For Cable Tensiometer: SeriesJonatan BernalNessuna valutazione finora
- Mste 3.0 Plane Geometry Hand OutsDocumento8 pagineMste 3.0 Plane Geometry Hand OutsJasmine MartinezNessuna valutazione finora
- Catalogo Carbones Helwig GDE-006Documento17 pagineCatalogo Carbones Helwig GDE-006Sergio HernandezNessuna valutazione finora
- No.1 PrestressedDocumento10 pagineNo.1 PrestressedKristin ArgosinoNessuna valutazione finora
- Hargreaves 2007Documento15 pagineHargreaves 2007Sam GonçalvesNessuna valutazione finora
- Machine DesignDocumento69 pagineMachine DesignSushant TiwariNessuna valutazione finora
- 03 Correcao Exercicios FixacaoDocumento3 pagine03 Correcao Exercicios FixacaoRodrigoNessuna valutazione finora