Potrebbero piacerti anche
- Prova PLC BasicoDocumento5 pagineProva PLC Basicogabrielviniciossilvamaganha100% (1)
- Detecção e Reparação de AvariasDocumento18 pagineDetecção e Reparação de AvariasSimba SamuelNessuna valutazione finora
- Microcontroladores vs MicroprocessadoresDocumento18 pagineMicrocontroladores vs Microprocessadores194digaoNessuna valutazione finora
- Aulas Programação PLC OMROM + GrafcetDocumento67 pagineAulas Programação PLC OMROM + GrafcetcarlosfilipeabNessuna valutazione finora
- Microwin Simulador S7-200Documento18 pagineMicrowin Simulador S7-200nuferro9550Nessuna valutazione finora
- Programa - Mecatrónica (UFCD) PDFDocumento69 paginePrograma - Mecatrónica (UFCD) PDFJoão MendonçaNessuna valutazione finora
- Automatismos e AutómatosDocumento27 pagineAutomatismos e Autómatosjorginho2Nessuna valutazione finora
- Variaveis e Tipos de Dados MikroCDocumento7 pagineVariaveis e Tipos de Dados MikroCFrancisco JosivanNessuna valutazione finora
- Automatos Programaveis - Exercicios PraticosDocumento25 pagineAutomatos Programaveis - Exercicios PraticosnunofasNessuna valutazione finora
- CLP para IniciantesDocumento25 pagineCLP para Iniciantesandersonalves_cruzNessuna valutazione finora
- Treinamento Cps 4000Documento101 pagineTreinamento Cps 4000Yuri QueirozNessuna valutazione finora
- Autómatos Programáveis Rede1Documento5 pagineAutómatos Programáveis Rede1António CarmoNessuna valutazione finora
- Laboratorio Arduino Parte 1V02Documento12 pagineLaboratorio Arduino Parte 1V02António Henriques100% (1)
- Doctecnico RedesDocumento44 pagineDoctecnico RedesClayton MouraNessuna valutazione finora
- Apostila PIC 16F628 (Prof. Wagner de Aguiar - IfSP)Documento145 pagineApostila PIC 16F628 (Prof. Wagner de Aguiar - IfSP)Ricardo Lima de Almeida100% (1)
- Microcontrolador PIC16F877ADocumento12 pagineMicrocontrolador PIC16F877Adanielfortal100% (1)
- Codificador 74147Documento2 pagineCodificador 74147William CoteNessuna valutazione finora
- Conjunto de Instrucoes PIC 16F877ADocumento36 pagineConjunto de Instrucoes PIC 16F877ANando100% (1)
- Controladores lógicos programáveis e suas aplicações na indústriaDocumento31 pagineControladores lógicos programáveis e suas aplicações na indústriaFernando Angelim LeiteNessuna valutazione finora
- Acionamento de motores de indução com inversores de frequênciaDocumento45 pagineAcionamento de motores de indução com inversores de frequênciaJair SousaNessuna valutazione finora
- CLP 5 DavilaDocumento35 pagineCLP 5 DavilaeutecomoNessuna valutazione finora
- Circuitos Integrados: Classificação e VantagensDocumento64 pagineCircuitos Integrados: Classificação e VantagensMargarida PaixãoNessuna valutazione finora
- UFCD 6072 - Microcontroladores - MemóriaDocumento12 pagineUFCD 6072 - Microcontroladores - MemóriaRNNessuna valutazione finora
- UFCD 6072 - Microcontroladores - InterrupçõesDocumento10 pagineUFCD 6072 - Microcontroladores - InterrupçõesRNNessuna valutazione finora
- Iniciação ArduinoDocumento27 pagineIniciação ArduinoRui FerreiraNessuna valutazione finora
- Curso de Autómatos ProgramáveisDocumento218 pagineCurso de Autómatos ProgramáveisFernandoNessuna valutazione finora
- Introdução ao PLC: estrutura e memóriaDocumento5 pagineIntrodução ao PLC: estrutura e memóriaL BragaNessuna valutazione finora
- 1.a Aula - PRÁTICA COM SOFT STARTERDocumento11 pagine1.a Aula - PRÁTICA COM SOFT STARTEREdwir MarceloNessuna valutazione finora
- Arquiteturas de MicroprocessadoresDocumento20 pagineArquiteturas de MicroprocessadoresPaulo Figueiredo VicenteNessuna valutazione finora
- História Da Automação IndustrialDocumento5 pagineHistória Da Automação IndustrialsuperajaxNessuna valutazione finora
- Apostila de CLP Nivel BasicoDocumento104 pagineApostila de CLP Nivel Basiconilsonery100% (1)
- Curso CLP Siemens S7-200Documento37 pagineCurso CLP Siemens S7-200nadab01Nessuna valutazione finora
- Sistema Operacional de TempoDocumento18 pagineSistema Operacional de TempofarofadevozNessuna valutazione finora
- STEP7 MicroWINDocumento32 pagineSTEP7 MicroWINJosé BarbosaNessuna valutazione finora
- Curso Técnico em Mecatrônica Exercício sobre Endereçamento IPDocumento7 pagineCurso Técnico em Mecatrônica Exercício sobre Endereçamento IPDaniel Silva De OliveiraNessuna valutazione finora
- Apostila Vijeo Citect IntDocumento366 pagineApostila Vijeo Citect IntFredericoOliveiraMartinsNessuna valutazione finora
- Automaçao CLP IntroducaoDocumento129 pagineAutomaçao CLP IntroducaoFernandoFerreiraJuniorNessuna valutazione finora
- Introdução aos Semicondutores e DíodosDocumento66 pagineIntrodução aos Semicondutores e Díodosxarly100% (1)
- 03 Microcontroladores Pic16f628aDocumento76 pagine03 Microcontroladores Pic16f628aAlexcya LopesNessuna valutazione finora
- Propostas de Exercícios para Resolver em Linguagem FBDDocumento4 paginePropostas de Exercícios para Resolver em Linguagem FBDAntónio HenriquesNessuna valutazione finora
- Aplicações de amplificadores operacionaisDocumento15 pagineAplicações de amplificadores operacionaisAntónio HenriquesNessuna valutazione finora
- Catalogo Treinamento PDFDocumento80 pagineCatalogo Treinamento PDFUlisses RodriguesNessuna valutazione finora
- Protocolos ModbusDocumento11 pagineProtocolos ModbusredesinformaNessuna valutazione finora
- Controle semáforo passagem peões ARDUINODocumento1 paginaControle semáforo passagem peões ARDUINOAntónio HenriquesNessuna valutazione finora
- 4-Zelio Software Semana 1Documento49 pagine4-Zelio Software Semana 1Daniel Trovao Simoes100% (1)
- Scadabr ConteudoDocumento87 pagineScadabr ConteudoJuliana Szekir Berger100% (1)
- Projetos De Instrumentação Eletrônica Usando O ArduinoDa EverandProjetos De Instrumentação Eletrônica Usando O ArduinoNessuna valutazione finora
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoDa EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNessuna valutazione finora
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoDa EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNessuna valutazione finora
- Desenvolvendo Projetos Modbus Com Comunicação Tcp/ip Programado No ArduinoDa EverandDesenvolvendo Projetos Modbus Com Comunicação Tcp/ip Programado No ArduinoNessuna valutazione finora
- Desenvolvendo Um Medidor De Vazão Modbus Rs485 No ArduinoDa EverandDesenvolvendo Um Medidor De Vazão Modbus Rs485 No ArduinoNessuna valutazione finora
- Antologia De Projetos No Arduino Com Display Lcd Volume VDa EverandAntologia De Projetos No Arduino Com Display Lcd Volume VNessuna valutazione finora
- Acionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoDa EverandAcionamento Remoto De Televisor Com Gsm Usando Comandos Sms Com Módulo Sim800l Programado No ArduinoNessuna valutazione finora
- Domótica Através Da Internet Com Esp32 Programado Em Arduino, App Inventor E PhpDa EverandDomótica Através Da Internet Com Esp32 Programado Em Arduino, App Inventor E PhpNessuna valutazione finora
- (Cliqueapostilas Com BR) - Mecanica-Tecnica PDFDocumento64 pagine(Cliqueapostilas Com BR) - Mecanica-Tecnica PDFValdir AndradeNessuna valutazione finora
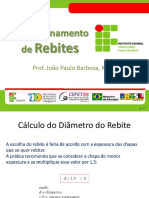
- Aula - 03 - Dimensionamento de Rebite, Parafuso e Chavetas PDFDocumento33 pagineAula - 03 - Dimensionamento de Rebite, Parafuso e Chavetas PDFRivaCamila Cavalleri MoreiraNessuna valutazione finora
- Elementos de MáquinasDocumento215 pagineElementos de MáquinasjobsonjobsonNessuna valutazione finora
- Apostila MecatronicaDocumento659 pagineApostila MecatronicaSergio Lima86% (14)
- Revista Audio Eletronica p020 A 029Documento5 pagineRevista Audio Eletronica p020 A 029ecskNessuna valutazione finora
- Elementos de MáquinasDocumento66 pagineElementos de Máquinasmfpsnt89% (9)
- Elementos de máquinas: ParafusosDocumento78 pagineElementos de máquinas: Parafusosgabrielleufsj100% (3)
- Revista Audio Eletronica p01 A 09Documento6 pagineRevista Audio Eletronica p01 A 09ecskNessuna valutazione finora
- Revista Audio Eletronica p050 A 059Documento5 pagineRevista Audio Eletronica p050 A 059ecskNessuna valutazione finora
- Revista Audio Eletronica p010 A 019Documento5 pagineRevista Audio Eletronica p010 A 019ecskNessuna valutazione finora
- MecatronicaDocumento37 pagineMecatronicaecskNessuna valutazione finora
- Curso C Pic MecatronicadegaragemDocumento37 pagineCurso C Pic MecatronicadegaragemGuilherme AugustoNessuna valutazione finora
- Funções e estruturas CCSDocumento8 pagineFunções e estruturas CCSluiswitz100% (1)
- Eletronica Industrial 2Documento133 pagineEletronica Industrial 2ecsk100% (2)
- Pfaff - Q45MSL PARTE 2 PDFDocumento38 paginePfaff - Q45MSL PARTE 2 PDFGilberto OliveiraNessuna valutazione finora
- Conta de energia elétrica detalhando consumo e valoresDocumento2 pagineConta de energia elétrica detalhando consumo e valoresAdriana FrancoNessuna valutazione finora
- Manual WATO EX-35Documento329 pagineManual WATO EX-35jean100% (2)
- AGOS TO N. 352 G r $ 1500Documento93 pagineAGOS TO N. 352 G r $ 1500asccorrea100% (3)
- Caixa Ampli cada 20W 3 EntradasDocumento13 pagineCaixa Ampli cada 20W 3 EntradasCleber CarossiNessuna valutazione finora
- Arcweld 1300 IsDocumento21 pagineArcweld 1300 IsDiegoNessuna valutazione finora
- Quadros elétricos renováveisDocumento11 pagineQuadros elétricos renováveisLuís António Ferreira da Costa AtalaiaNessuna valutazione finora
- Instruções montagem emenda elos cabo MTDocumento7 pagineInstruções montagem emenda elos cabo MTVivaldo FreitasNessuna valutazione finora
- Circuito de entrada de canal A/B com proteção contra sobrecargaDocumento1 paginaCircuito de entrada de canal A/B com proteção contra sobrecargaNilton SoutoNessuna valutazione finora
- Fonte para Notebook Fortrek 90w 10 Pinos Adaptaveis Unp 290 142107441947Documento12 pagineFonte para Notebook Fortrek 90w 10 Pinos Adaptaveis Unp 290 142107441947lcofresiNessuna valutazione finora
- Cap 01 Lei de Coulomb ResumidoDocumento3 pagineCap 01 Lei de Coulomb ResumidoVictorNessuna valutazione finora
- Conversores CC-CADocumento48 pagineConversores CC-CALuciano VarandaNessuna valutazione finora
- MatiasDocumento9 pagineMatiasRúbem Matias SatonhoNessuna valutazione finora
- Manual de Procedimentos Da Operação: Módulo 10 - Submódulo 10.21Documento8 pagineManual de Procedimentos Da Operação: Módulo 10 - Submódulo 10.21Gestão Qualidade SGQNessuna valutazione finora
- Apostila Zélio Soft-1Documento31 pagineApostila Zélio Soft-1JeanFelipheNessuna valutazione finora
- WT 21 Modbus WeightechDocumento120 pagineWT 21 Modbus WeightechTarsis JuniorNessuna valutazione finora
- Requisitos técnicos e procedimentos de ensaios para certificação de produtos de telecomunicaçãoDocumento144 pagineRequisitos técnicos e procedimentos de ensaios para certificação de produtos de telecomunicaçãoClaudiney BricksNessuna valutazione finora
- Aula 11-SE (RESUMÃO)Documento15 pagineAula 11-SE (RESUMÃO)xavier.matheus98Nessuna valutazione finora
- Sistemas Digitais - 007 PDFDocumento15 pagineSistemas Digitais - 007 PDFPhillip007Nessuna valutazione finora
- ESCN-Ganho e resposta em frequência de amplificadores de vários estágiosDocumento11 pagineESCN-Ganho e resposta em frequência de amplificadores de vários estágiosAbednego Zano100% (1)
- Como instalar uma cerca elétrica de forma seguraDocumento10 pagineComo instalar uma cerca elétrica de forma seguraThiago Medeiros100% (2)
- Fundamentos WirelessDocumento16 pagineFundamentos WirelessThiago L Santos100% (1)
- Relatório de Estágio II - 29-11-2021.2Documento13 pagineRelatório de Estágio II - 29-11-2021.2Karoline VilarinhoNessuna valutazione finora
- Automação industrial apostilaDocumento151 pagineAutomação industrial apostilaArbuino Rodrigues Silva FilhoNessuna valutazione finora
- Catálogo FinderDocumento401 pagineCatálogo FinderLuis Carlos SegatoNessuna valutazione finora
- Relatório de Estágio Técnico em TelecomunicaçõesDocumento11 pagineRelatório de Estágio Técnico em Telecomunicaçõeskylex.Nessuna valutazione finora
- Memorial de Elétrica-Eng362-220706Documento27 pagineMemorial de Elétrica-Eng362-220706Gabryel AlvesNessuna valutazione finora
- Manual de operação e manutenção betoneira 1 traço 400 litrosDocumento20 pagineManual de operação e manutenção betoneira 1 traço 400 litrosVanessa CassimNessuna valutazione finora
- Manual da seladora Cristófoli PlusDocumento2 pagineManual da seladora Cristófoli PlusRobério DamascenoNessuna valutazione finora
- Gerador de Energia Solar Abb Colonial Romagnole Aldo Solar On Grid (76472-3)Documento8 pagineGerador de Energia Solar Abb Colonial Romagnole Aldo Solar On Grid (76472-3)Willian AlvesNessuna valutazione finora