Potrebbero piacerti anche
- Calculating Gpl under ecc loadingDocumento60 pagineCalculating Gpl under ecc loadingandyhrNessuna valutazione finora
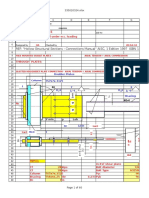
- Design Cantilever Sheetpile WallsDocumento26 pagineDesign Cantilever Sheetpile WallsAlfredo A Lopez100% (1)
- Design of Anchored Sheet Pile WallsDocumento27 pagineDesign of Anchored Sheet Pile WallsMadhu KumarNessuna valutazione finora
- Precast Concrete Manhole Bouyancy CalculatorDocumento6 paginePrecast Concrete Manhole Bouyancy CalculatorandyhrNessuna valutazione finora
- Lateral Loads On PilesDocumento5 pagineLateral Loads On Pilesandyhr100% (1)
- Design of Tall Chimneys by Manohar PDFDocumento297 pagineDesign of Tall Chimneys by Manohar PDFAshok Ammaiyappan100% (4)
- Strengthening of RC Chimneys With FRP Composites 0Documento6 pagineStrengthening of RC Chimneys With FRP Composites 0andyhrNessuna valutazione finora
- 07wsS Bond Worksheet Anchored Sheet Pile Wall (DA1)Documento4 pagine07wsS Bond Worksheet Anchored Sheet Pile Wall (DA1)yousifmohammedNessuna valutazione finora
- Concrete Box CulvertsDocumento19 pagineConcrete Box CulvertsandyhrNessuna valutazione finora
- Behavior of FRP Chimneys Under Thermal and Wind LoadDocumento163 pagineBehavior of FRP Chimneys Under Thermal and Wind LoadandyhrNessuna valutazione finora
- Glued Laminated TimberDocumento5 pagineGlued Laminated Timbersebastian9033Nessuna valutazione finora
- RCC Bund Wall With Shear KeyDocumento27 pagineRCC Bund Wall With Shear Keynhulugalla100% (1)
- ACI Mix DesignDocumento9 pagineACI Mix DesignandyhrNessuna valutazione finora
- Wood Beam Calculator: General InformationDocumento1 paginaWood Beam Calculator: General InformationandyhrNessuna valutazione finora
- Wind Analysis of Tall Stack Like Structure: Jigar K. SevaliaDocumento4 pagineWind Analysis of Tall Stack Like Structure: Jigar K. Sevaliag4goharNessuna valutazione finora
- Theory-Manual Eng 2011 PDFDocumento119 pagineTheory-Manual Eng 2011 PDFErisvaldo de LimaNessuna valutazione finora
- Gravity Wall Calculator TADocumento14 pagineGravity Wall Calculator TAANKUR GHOSHNessuna valutazione finora
- Sheet Pile Wall Design SummaryDocumento39 pagineSheet Pile Wall Design SummaryandyhrNessuna valutazione finora
- Common Retaining Walls: Dr. Mohammed E. Haque, P.E. Retaining WallsDocumento18 pagineCommon Retaining Walls: Dr. Mohammed E. Haque, P.E. Retaining WallsandyhrNessuna valutazione finora
- Column Design GuideDocumento87 pagineColumn Design GuideTariqAzizNessuna valutazione finora
- Visual Inspection Report - Steel StructuresDocumento8 pagineVisual Inspection Report - Steel StructuresandyhrNessuna valutazione finora
- UB SectionsDocumento355 pagineUB Sectionsandyhr0% (1)
- Https Akkhrakh - Files.wordpress - Com 2011-09-6 Design of Pad Foundations1Documento78 pagineHttps Akkhrakh - Files.wordpress - Com 2011-09-6 Design of Pad Foundations1boyzesNessuna valutazione finora
- 2011 Engineering Design Guidelines CFDDocumento91 pagine2011 Engineering Design Guidelines CFDandyhrNessuna valutazione finora
- 1 Design of Tower Foundations Subramonia Book GOOD GOODDocumento7 pagine1 Design of Tower Foundations Subramonia Book GOOD GOODandyhr100% (1)
- A220 Week1 Footings and FoundationsDocumento7 pagineA220 Week1 Footings and FoundationsMichael John CamachoNessuna valutazione finora
- Design of Tower FoundationsDocumento7 pagineDesign of Tower FoundationsGuillermo LockhartNessuna valutazione finora
- Freezing IndexDocumento5 pagineFreezing Indexandyhr100% (3)
- GL3655EDocumento0 pagineGL3655EandyhrNessuna valutazione finora
- Front End LoadingDocumento10 pagineFront End LoadingRnD2013Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- MCE 514 Nonlinear Finite ElementsDocumento2 pagineMCE 514 Nonlinear Finite ElementsWilliam Gomez ZabaletaNessuna valutazione finora
- PhysicsDocumento147 paginePhysicsMâñøj Thę ŠtrįkėrNessuna valutazione finora
- Buoyancy 100806114902 Phpapp02Documento11 pagineBuoyancy 100806114902 Phpapp02saryNessuna valutazione finora
- B Tech Mechatronic Syllanus Sem I-Vi PDFDocumento60 pagineB Tech Mechatronic Syllanus Sem I-Vi PDFprNessuna valutazione finora
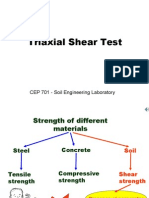
- Triaxial TestDocumento67 pagineTriaxial TestJeffNessuna valutazione finora
- Ch31-PHYS 205-Problems To Solve in Class-Faradays-lawDocumento5 pagineCh31-PHYS 205-Problems To Solve in Class-Faradays-lawAllyson OffreyNessuna valutazione finora
- FM Assignment 5Documento4 pagineFM Assignment 5JadeJadeTrevibulNessuna valutazione finora
- Burmister Three Layer TheoryDocumento10 pagineBurmister Three Layer TheoryT K Rao100% (5)
- Buried Pipe - CalcstressDocumento17 pagineBuried Pipe - CalcstressAnjani PrabhakarNessuna valutazione finora
- Cit - University Mechanical Engineering Me Comprehensive Evaluation Course 3Documento2 pagineCit - University Mechanical Engineering Me Comprehensive Evaluation Course 3Kurt BaylanNessuna valutazione finora
- Bài 5 - Lateral Motion (Stick Fixed) (2008)Documento12 pagineBài 5 - Lateral Motion (Stick Fixed) (2008)neiht_ksNessuna valutazione finora
- Modeling and Analysis of Soil-Pile InteractionDocumento21 pagineModeling and Analysis of Soil-Pile InteractionLhester NavascaNessuna valutazione finora
- Chipman TransmissionLines TextDocumento244 pagineChipman TransmissionLines TextMau Gar Ec83% (6)
- Q3 - Zero Negative Integral ExponentsDocumento13 pagineQ3 - Zero Negative Integral ExponentsatNessuna valutazione finora
- Basement Wall Design Geotechnical AspectsDocumento3 pagineBasement Wall Design Geotechnical Aspectssaber javidNessuna valutazione finora
- Notes LT3Documento16 pagineNotes LT3osmanfıratNessuna valutazione finora
- Statics of Rigid BodiesDocumento12 pagineStatics of Rigid BodiesJoanne-chan Mingi100% (1)
- Timber Columns: A. Axially Loaded ColumnsDocumento2 pagineTimber Columns: A. Axially Loaded ColumnsClarenz BragaNessuna valutazione finora
- HPLC Heat Exchanger Design PhilosophyDocumento28 pagineHPLC Heat Exchanger Design Philosophyagarwalashwin320% (1)
- Examiners Report Breadth in Physics PDFDocumento32 pagineExaminers Report Breadth in Physics PDFNeural Spark PhysicsNessuna valutazione finora
- Microwave Engineering SyllabusDocumento3 pagineMicrowave Engineering SyllabusnatashaNessuna valutazione finora
- Mathieu EquationDocumento69 pagineMathieu EquationVivek SinghNessuna valutazione finora
- Magnetic Flow MeterDocumento3 pagineMagnetic Flow Meterniazakhtar100% (1)
- Measurement and Prediction of Densities and Viscosities of Aqueous Binary and Ternary Solutions at Temperatures From 20 To 60 °c PDFDocumento42 pagineMeasurement and Prediction of Densities and Viscosities of Aqueous Binary and Ternary Solutions at Temperatures From 20 To 60 °c PDFnoviNessuna valutazione finora
- PDFDocumento629 paginePDFSandra EcheverriNessuna valutazione finora
- Rheology of The Earth's Mantle: A Historical Review: Gondwana Research July 2010Documento30 pagineRheology of The Earth's Mantle: A Historical Review: Gondwana Research July 2010MarcosGouveaNessuna valutazione finora
- Plastic analysis of frame structuresDocumento65 paginePlastic analysis of frame structuresgirma kebedeNessuna valutazione finora
- Chapter 11-SolutionDocumento9 pagineChapter 11-Solutionmp6w9qw7t2Nessuna valutazione finora
- Types of EMWaves & Their UsesDocumento3 pagineTypes of EMWaves & Their UsesPallika DhingraNessuna valutazione finora
- ROM CompositeDocumento37 pagineROM CompositeNebyat YazachewNessuna valutazione finora