Potrebbero piacerti anche
- Example RobDocumento5 pagineExample RobmakroumNessuna valutazione finora
- Windturbine GHDocumento6 pagineWindturbine GHmakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Windjkl 123Documento20 pagineWindjkl 123makroumNessuna valutazione finora
- Modeling Wind Farms in Power System Simulation Studies: A ReviewDocumento21 pagineModeling Wind Farms in Power System Simulation Studies: A ReviewmakroumNessuna valutazione finora
- Modeling Wind Farms in Power System Simulation Studies: A ReviewDocumento21 pagineModeling Wind Farms in Power System Simulation Studies: A ReviewmakroumNessuna valutazione finora
- Note Ex1 Lab4Documento1 paginaNote Ex1 Lab4makroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Im Speed Control PDFDocumento64 pagineIm Speed Control PDFseshubabu_999Nessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Electrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KováDocumento6 pagineElectrical Drive Inductive Coupling: Irena Ková Ová, Dobroslav KovámakroumNessuna valutazione finora
- Im Speed Control PDFDocumento64 pagineIm Speed Control PDFseshubabu_999Nessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Chem 17 Exp 3 RDR Chemical KineticsDocumento4 pagineChem 17 Exp 3 RDR Chemical KineticscrazypatrishNessuna valutazione finora
- A Tutorial On Spectral Sound Processing Using Max/MSP and JitterDocumento16 pagineA Tutorial On Spectral Sound Processing Using Max/MSP and Jittertramazio0% (1)
- KD-131 Asme Viii Div3Documento2 pagineKD-131 Asme Viii Div3comar85Nessuna valutazione finora
- Parts Manual Z-45Documento240 pagineParts Manual Z-45John Forero PinzonNessuna valutazione finora
- ST7201-Finite Element MethodDocumento14 pagineST7201-Finite Element MethodVishal RanganathanNessuna valutazione finora
- Entropy and The Second Law of Thermodynamics Disorder and The Unavailability of Energy 6Documento14 pagineEntropy and The Second Law of Thermodynamics Disorder and The Unavailability of Energy 6HarishChoudharyNessuna valutazione finora
- Formula Sheet: Basic Trigonometric IdentitiesDocumento4 pagineFormula Sheet: Basic Trigonometric Identitieschetan temkarNessuna valutazione finora
- Project 10-Fittings DesignDocumento10 pagineProject 10-Fittings DesignVishwasen KhotNessuna valutazione finora
- PDC NitDocumento6 paginePDC NitrpshvjuNessuna valutazione finora
- Day 4 - Lesson 15 Tuples: Python Mini-Course University of Oklahoma Department of PsychologyDocumento20 pagineDay 4 - Lesson 15 Tuples: Python Mini-Course University of Oklahoma Department of PsychologyhuseyiNessuna valutazione finora
- Testing, Adjusting, and Balancing - TabDocumento19 pagineTesting, Adjusting, and Balancing - TabAmal Ka100% (1)
- Gen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Documento13 pagineGen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Angeline TumananNessuna valutazione finora
- Bloom QuestionsDocumento270 pagineBloom QuestionsrameshsmeNessuna valutazione finora
- Reverse Circulation Cementing: The Complete PictureDocumento104 pagineReverse Circulation Cementing: The Complete PictureJoan Corso100% (1)
- Solution To QuestionsDocumento76 pagineSolution To QuestionsVipul AggarwalNessuna valutazione finora
- MIL-PRF-85704C Turbin CompressorDocumento31 pagineMIL-PRF-85704C Turbin CompressordesosanNessuna valutazione finora
- SL-19536 - REV2!02!13 User Manual MC CondensersDocumento68 pagineSL-19536 - REV2!02!13 User Manual MC CondensersCristian SevillaNessuna valutazione finora
- Como Desarmar Sony Vaio VGN-FE PDFDocumento14 pagineComo Desarmar Sony Vaio VGN-FE PDFPeruInalambrico Redes InalambricasNessuna valutazione finora
- Class VI (Second Term)Documento29 pagineClass VI (Second Term)Yogesh BansalNessuna valutazione finora
- Z Series: VZ-80 Series Portable Radio - VHF/UHFDocumento2 pagineZ Series: VZ-80 Series Portable Radio - VHF/UHFPrima SonyNessuna valutazione finora
- Engine Control System Circuit Diagram: Without This Message by Purchasing NovapdfDocumento3 pagineEngine Control System Circuit Diagram: Without This Message by Purchasing NovapdfJose Luis Gutierrez TamayoNessuna valutazione finora
- Test ElectrolysisDocumento3 pagineTest ElectrolysisNatalia WhyteNessuna valutazione finora
- Fractal Cities - A Geometry of Form and Function PDFDocumento432 pagineFractal Cities - A Geometry of Form and Function PDFDavid Diaz100% (1)
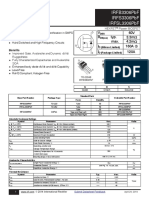
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocumento12 pagineIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNessuna valutazione finora
- Infinera Ds Isfp Timedivision Multiplexing ModulesDocumento3 pagineInfinera Ds Isfp Timedivision Multiplexing ModulesAnonymous bpf0OZSd9Nessuna valutazione finora
- Science BDocumento2 pagineScience BIyer JuniorNessuna valutazione finora
- Data Visualization For Python - Sales Retail - r1Documento19 pagineData Visualization For Python - Sales Retail - r1Mazhar MahadzirNessuna valutazione finora
- SV Concepts PLK PDFDocumento276 pagineSV Concepts PLK PDFPoojashree LRNessuna valutazione finora
- The Library of Babel - WikipediaDocumento35 pagineThe Library of Babel - WikipediaNeethu JosephNessuna valutazione finora
- Review Skills 1-8Documento1 paginaReview Skills 1-8TegarNessuna valutazione finora