Potrebbero piacerti anche
- Industry 4.0 Paradigm: The Viewpoint of The Small and Medium EnterprisesDocumento6 pagineIndustry 4.0 Paradigm: The Viewpoint of The Small and Medium EnterprisesANA CECILIA CEBALLOS MONTOYA (MEDELLIN)Nessuna valutazione finora
- Hanito El PatitoDocumento6 pagineHanito El PatitoyudopplyrNessuna valutazione finora
- Operating Conditions For UsersDocumento1 paginaOperating Conditions For UsersyudopplyrNessuna valutazione finora
- Bode Diagramm ExampleDocumento1 paginaBode Diagramm ExampleyudopplyrNessuna valutazione finora
- MCUmgr Bluetooth ProtocolDocumento8 pagineMCUmgr Bluetooth ProtocolyudopplyrNessuna valutazione finora
- Radiation Effects: Incorporating Plasma Science and Plasma TechnologyDocumento5 pagineRadiation Effects: Incorporating Plasma Science and Plasma TechnologyyudopplyrNessuna valutazione finora
- Closed-But-Is-The-Countable-Union-Of-Closed-Se: Racionales QDocumento1 paginaClosed-But-Is-The-Countable-Union-Of-Closed-Se: Racionales QyudopplyrNessuna valutazione finora
- AroraDocumento4 pagineArorayudopplyrNessuna valutazione finora
- PztpnasDocumento45 paginePztpnasyudopplyrNessuna valutazione finora
- Studieren FH Aachen 2011 EnglischDocumento180 pagineStudieren FH Aachen 2011 EnglischyudopplyrNessuna valutazione finora
- Open and Closed Sets: 1 2 N N I 1 IDocumento7 pagineOpen and Closed Sets: 1 2 N N I 1 IyudopplyrNessuna valutazione finora
- Ingles DialogDocumento2 pagineIngles DialogyudopplyrNessuna valutazione finora
- Taking NotesDocumento3 pagineTaking Notesapi-247620221Nessuna valutazione finora
- Ingles DialogDocumento2 pagineIngles DialogyudopplyrNessuna valutazione finora
- VEX Sack Attack Appendix F College Challenge Rev082312Documento3 pagineVEX Sack Attack Appendix F College Challenge Rev082312yudopplyrNessuna valutazione finora
- Ingles DialogDocumento2 pagineIngles DialogyudopplyrNessuna valutazione finora
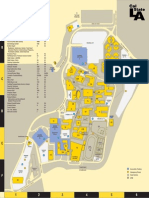
- Campus MapDocumento1 paginaCampus MapyudopplyrNessuna valutazione finora
- Datasheet LM231Documento20 pagineDatasheet LM231yudopplyrNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- HearstDocumento16 pagineHearstapi-602711853Nessuna valutazione finora
- Electric Vehicle Charging Station BplanDocumento19 pagineElectric Vehicle Charging Station BplanAjithNessuna valutazione finora
- PDF RR Grade Sep ProjectsDocumento46 paginePDF RR Grade Sep ProjectsjunqiangdongNessuna valutazione finora
- Case Study StarbucksDocumento2 pagineCase Study StarbucksSonal Agarwal100% (2)
- Homework 1 Tarea 1Documento11 pagineHomework 1 Tarea 1Anette Wendy Quipo Kancha100% (1)
- RRC & RabDocumento14 pagineRRC & RabSyed Waqas AhmedNessuna valutazione finora
- Digital-To-Analog Converter - Wikipedia, The Free EncyclopediaDocumento8 pagineDigital-To-Analog Converter - Wikipedia, The Free EncyclopediaAnilkumar KubasadNessuna valutazione finora
- 1 s2.0 S0955221920305689 MainDocumento19 pagine1 s2.0 S0955221920305689 MainJoaoNessuna valutazione finora
- Transportation Engineering Unit I Part I CTLPDocumento60 pagineTransportation Engineering Unit I Part I CTLPMadhu Ane NenuNessuna valutazione finora
- CFA L1 Ethics Questions and AnswersDocumento94 pagineCFA L1 Ethics Questions and AnswersMaulik PatelNessuna valutazione finora
- VHP Series Five P9394Gsi S5: With Esm2 and Empact Emission Control SystemDocumento2 pagineVHP Series Five P9394Gsi S5: With Esm2 and Empact Emission Control SystemGabrielito PachacamaNessuna valutazione finora
- TMIS07 - Kalam Internship - S7 Tesla MindsDocumento3 pagineTMIS07 - Kalam Internship - S7 Tesla MindsDMJ JonesNessuna valutazione finora
- Sip TrunkDocumento288 pagineSip TrunkSayaOtanashiNessuna valutazione finora
- CHAPTER I KyleDocumento13 pagineCHAPTER I KyleCresiel Pontijon100% (1)
- Caracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.Documento2 pagineCaracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.meredith.licagaNessuna valutazione finora
- E10.unit 3 - Getting StartedDocumento2 pagineE10.unit 3 - Getting Started27. Nguyễn Phương LinhNessuna valutazione finora
- Faithful Love: Guitar SoloDocumento3 pagineFaithful Love: Guitar SoloCarol Goldburg33% (3)
- Oracle® Secure Backup: Installation and Configuration Guide Release 10.4Documento178 pagineOracle® Secure Backup: Installation and Configuration Guide Release 10.4andrelmacedoNessuna valutazione finora
- Jose André Morales, PH.D.: Ingeniería SocialDocumento56 pagineJose André Morales, PH.D.: Ingeniería SocialJYMYNessuna valutazione finora
- Defence QuestionnaireDocumento2 pagineDefence QuestionnaireSumitt SinghNessuna valutazione finora
- A Modified Linear Programming Method For Distribution System ReconfigurationDocumento6 pagineA Modified Linear Programming Method For Distribution System Reconfigurationapi-3697505Nessuna valutazione finora
- Atmosphere Study Guide 2013Documento4 pagineAtmosphere Study Guide 2013api-205313794Nessuna valutazione finora
- FloodDocumento9 pagineFloodapi-352767278Nessuna valutazione finora
- T-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDocumento35 pagineT-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDoğukan TuranNessuna valutazione finora
- Travel OrderDocumento2 pagineTravel OrderStephen EstalNessuna valutazione finora
- ECDIS Presentation Library 4Documento16 pagineECDIS Presentation Library 4Orlando QuevedoNessuna valutazione finora
- 20131022-Additive Manufacturing & Allied Technologies, PuneDocumento56 pagine20131022-Additive Manufacturing & Allied Technologies, Puneprakush_prakushNessuna valutazione finora
- PhysioEx Exercise 1 Activity 1Documento3 paginePhysioEx Exercise 1 Activity 1edvin merida proNessuna valutazione finora
- Luigi Cherubini Requiem in C MinorDocumento8 pagineLuigi Cherubini Requiem in C MinorBen RutjesNessuna valutazione finora
- Simple Fat Burning Exercises at Home or GymDocumento6 pagineSimple Fat Burning Exercises at Home or GymShirleyNessuna valutazione finora