Potrebbero piacerti anche
- Permanent Magnet Synchronous Motors (PMSM)Documento34 paginePermanent Magnet Synchronous Motors (PMSM)Navdeep KaurNessuna valutazione finora
- Permanent Magnet MotorsDocumento6 paginePermanent Magnet MotorsHadeedAhmedSherNessuna valutazione finora
- Permanent Magnet Synchronous Motor DrivesDocumento19 paginePermanent Magnet Synchronous Motor Driveskumar001450% (2)
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocumento7 pagineDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANessuna valutazione finora
- Power Generation With Solar Dish Stirling EngineDocumento6 paginePower Generation With Solar Dish Stirling EngineFaysal Abdul FattahNessuna valutazione finora
- Ansys Electric Machines and Power ElectronicsDocumento58 pagineAnsys Electric Machines and Power ElectronicsLatisha CarterNessuna valutazione finora
- Pendulum PumpDocumento2 paginePendulum Pumpedisonmech_erfNessuna valutazione finora
- Experiment 4 Simple MotorDocumento6 pagineExperiment 4 Simple MotorKim HarlyNessuna valutazione finora
- 17 Permanent Magnet Motor DesignDocumento41 pagine17 Permanent Magnet Motor DesignMehmet Kırgözoğlu100% (4)
- Construction of Machine PDFDocumento110 pagineConstruction of Machine PDFAvinash SinghNessuna valutazione finora
- Permanent Magnet Linear Generator DesignDocumento5 paginePermanent Magnet Linear Generator DesignIOSRjournalNessuna valutazione finora
- Cam Operated HammerDocumento52 pagineCam Operated HammerSRL MECHNessuna valutazione finora
- Making A Flynn Motor - Circuit Diagram Attached: Parallel Path Magnetic TheoryDocumento5 pagineMaking A Flynn Motor - Circuit Diagram Attached: Parallel Path Magnetic Theorydewidewi76Nessuna valutazione finora
- Switched Reluctance Motor PDFDocumento79 pagineSwitched Reluctance Motor PDFHAMID SULIAMANNessuna valutazione finora
- Brushed DC Electric Motor - WikipediaDocumento63 pagineBrushed DC Electric Motor - WikipediaKISHORE PERUMALLANessuna valutazione finora
- Synchronous Reluctance Motor PDFDocumento17 pagineSynchronous Reluctance Motor PDFVamsi Kattamuri100% (4)
- Electric Generator Design ProjectDocumento13 pagineElectric Generator Design Projectkhan.pakiNessuna valutazione finora
- Magnetic RepulsionDocumento22 pagineMagnetic Repulsionpraving5005Nessuna valutazione finora
- Dynamic Modeling of PMSMDocumento10 pagineDynamic Modeling of PMSMHisham Magdi El DeebNessuna valutazione finora
- Tesla Coil DriverDocumento9 pagineTesla Coil DrivercatalinbrvNessuna valutazione finora
- Design Analysis and Simulation of Magnetic Biased Inductors With Saturation-Gap - EPE2014Documento8 pagineDesign Analysis and Simulation of Magnetic Biased Inductors With Saturation-Gap - EPE2014andresNessuna valutazione finora
- SUPERCAPACITORS: A NEW HIGH-POWER ENERGY STORAGE DEVICEDocumento4 pagineSUPERCAPACITORS: A NEW HIGH-POWER ENERGY STORAGE DEVICENitin Kathuria100% (1)
- AC - MotorsDocumento76 pagineAC - MotorsAung San Htwe100% (3)
- Free Piston Engine PDFDocumento2 pagineFree Piston Engine PDFWilliamNessuna valutazione finora
- A New Unity Power Factor Quasi-Resonant Induction Heater PDFDocumento225 pagineA New Unity Power Factor Quasi-Resonant Induction Heater PDFŽarko Dačević100% (1)
- An Introduction To Brushless DC Motor ControlDocumento33 pagineAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNessuna valutazione finora
- Prentice Earth Energy TapDocumento7 paginePrentice Earth Energy TapGeorggeNessuna valutazione finora
- Magnets Design Guide: Table 2.1 Magnet Material ComparisonsDocumento44 pagineMagnets Design Guide: Table 2.1 Magnet Material ComparisonsVandear GoalcantaraNessuna valutazione finora
- Power Generation Using Speed Breaker Ieee FormatDocumento7 paginePower Generation Using Speed Breaker Ieee Formatnagarjuna888Nessuna valutazione finora
- Lecture6 - Losses in Electric MachinesDocumento24 pagineLecture6 - Losses in Electric Machinesthulasi_krishnaNessuna valutazione finora
- Permanent-Magnet Starter Motor (Automobile)Documento3 paginePermanent-Magnet Starter Motor (Automobile)prasad100% (1)
- Stepper MotorDocumento59 pagineStepper Motorya zool / يا زولNessuna valutazione finora
- Traction Motor DesignDocumento11 pagineTraction Motor DesignS.m. FerdousNessuna valutazione finora
- Permanent Magnet Brushless DC MotorDocumento7 paginePermanent Magnet Brushless DC MotoratultiwarihinduNessuna valutazione finora
- Electrical Machines: Induction Motors & Synchronous MachinesDocumento42 pagineElectrical Machines: Induction Motors & Synchronous MachinesYoshua DylanNessuna valutazione finora
- A Two-Stage Stirling CryocoolerDocumento7 pagineA Two-Stage Stirling CryocoolerrkoGearNessuna valutazione finora
- Mono Wheel Self Balancing BikeDocumento11 pagineMono Wheel Self Balancing BikeAkhilesh MagupalliNessuna valutazione finora
- Machine Training PM Synchronous Ansoft MaxwellDocumento111 pagineMachine Training PM Synchronous Ansoft Maxwellmashinbaz1100% (3)
- 08 CH-6, Fluid Motion Within Combustion ChamberDocumento24 pagine08 CH-6, Fluid Motion Within Combustion ChamberAhsan AliNessuna valutazione finora
- Axial Flux Motor PDFDocumento27 pagineAxial Flux Motor PDFRyan LagasseNessuna valutazione finora
- Modeling and Simulation of BLDC Motor in MATLABDocumento5 pagineModeling and Simulation of BLDC Motor in MATLABvishiwizardNessuna valutazione finora
- Permanent-Magnet Synchronous Machines With Non-Overlapping Concentrated Windings For Low-Speed Direct-Drive Applications.Documento177 paginePermanent-Magnet Synchronous Machines With Non-Overlapping Concentrated Windings For Low-Speed Direct-Drive Applications.briscabarombiNessuna valutazione finora
- Mini Project ReportDocumento30 pagineMini Project Reportsurendra charyNessuna valutazione finora
- A Linear Motor or Linear Induction Motor Is An Alternating CurrentDocumento6 pagineA Linear Motor or Linear Induction Motor Is An Alternating CurrentAnand KanaujiyaNessuna valutazione finora
- Average Synchronous Torque of Synchronous Machines, With Particular Reference To Reluctance MachinesDocumento3 pagineAverage Synchronous Torque of Synchronous Machines, With Particular Reference To Reluctance MachinesAbhishek AgarwalNessuna valutazione finora
- Direct Back EMF Detection Method for Sensorless BLDC DrivesDocumento91 pagineDirect Back EMF Detection Method for Sensorless BLDC DrivesnicoletabytaxNessuna valutazione finora
- Trans Flux MotorDocumento46 pagineTrans Flux MotorkoppulabroNessuna valutazione finora
- Linear Engine MotorDocumento7 pagineLinear Engine Motorwanstep_7100% (1)
- Permanent Magnet MotorDocumento4 paginePermanent Magnet MotorGerardo BautistaNessuna valutazione finora
- PX7203-Special Electrical Machines PDFDocumento11 paginePX7203-Special Electrical Machines PDFvaishnavisriNessuna valutazione finora
- Alternator RewindDocumento39 pagineAlternator RewindanwarNessuna valutazione finora
- Anti-Lenz - Anti-LenzDocumento6 pagineAnti-Lenz - Anti-LenzTomislav JovanovicNessuna valutazione finora
- Reluctance MotorDocumento16 pagineReluctance Motorapi-382713280% (5)
- Stirling Design Calculations For Alpha Type Based On Certain TheoriesDocumento10 pagineStirling Design Calculations For Alpha Type Based On Certain TheoriesMehroz Khan100% (2)
- Understanding Permanent Magnet Synchronous MotorsDocumento28 pagineUnderstanding Permanent Magnet Synchronous MotorsMd QutubuddinNessuna valutazione finora
- Permanent Magnet Synchronous MotorDocumento4 paginePermanent Magnet Synchronous MotorMAHENDRAN DNessuna valutazione finora
- Ev SH-2Documento38 pagineEv SH-2Mayur MerNessuna valutazione finora
- LSPMDocumento38 pagineLSPMSathiyaraj KondusamyNessuna valutazione finora
- Xia2015 Opt IPM TagiDocumento9 pagineXia2015 Opt IPM TagiShovan DeyNessuna valutazione finora
- Single Phase and Permanent Magnet Machines: Course Materials Small AC MotorDocumento12 pagineSingle Phase and Permanent Magnet Machines: Course Materials Small AC MotorBu DakNessuna valutazione finora
- Toita PDFDocumento1 paginaToita PDFWilli Apupalo NaranjoNessuna valutazione finora
- Toita PDFDocumento1 paginaToita PDFWilli Apupalo NaranjoNessuna valutazione finora
- JJJKKOO stepsDocumento1 paginaJJJKKOO stepsWilli Apupalo NaranjoNessuna valutazione finora
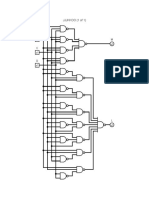
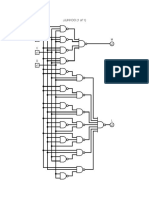
- DEBER 3 Leonardo Javier Garcia RodriguezDocumento10 pagineDEBER 3 Leonardo Javier Garcia RodriguezWilli Apupalo NaranjoNessuna valutazione finora
- Program A 10Documento2 pagineProgram A 10Willi Apupalo NaranjoNessuna valutazione finora
- Equity AdvisorDocumento2 pagineEquity AdvisorHarshit AgarwalNessuna valutazione finora
- Programming in Java Assignment 8: NPTEL Online Certification Courses Indian Institute of Technology KharagpurDocumento4 pagineProgramming in Java Assignment 8: NPTEL Online Certification Courses Indian Institute of Technology KharagpurPawan NaniNessuna valutazione finora
- Critical Values For The Dickey-Fuller Unit Root T-Test StatisticsDocumento1 paginaCritical Values For The Dickey-Fuller Unit Root T-Test Statisticswjimenez1938Nessuna valutazione finora
- MTS Material Testing SolutionsDocumento34 pagineMTS Material Testing SolutionskarthegreNessuna valutazione finora
- CCTV8 PDFDocumento2 pagineCCTV8 PDFFelix John NuevaNessuna valutazione finora
- Fall Protection ANSIDocumento5 pagineFall Protection ANSIsejudavisNessuna valutazione finora
- Troubleshooting Edge Quality: Mild SteelDocumento14 pagineTroubleshooting Edge Quality: Mild SteelAnonymous U6yVe8YYCNessuna valutazione finora
- Superior University: 5Mwp Solar Power Plant ProjectDocumento3 pagineSuperior University: 5Mwp Solar Power Plant ProjectdaniyalNessuna valutazione finora
- Serras Tilted Arc Art and Non Art Senie in Art Journal 1989Documento6 pagineSerras Tilted Arc Art and Non Art Senie in Art Journal 1989api-275667500Nessuna valutazione finora
- Movie Review TemplateDocumento9 pagineMovie Review Templatehimanshu shuklaNessuna valutazione finora
- PHASE 2 - Chapter 6 Object ModellingDocumento28 paginePHASE 2 - Chapter 6 Object Modellingscm39Nessuna valutazione finora
- 272 Concept Class Mansoura University DR Rev 2Documento8 pagine272 Concept Class Mansoura University DR Rev 2Gazzara WorldNessuna valutazione finora
- ViscosimetroDocumento7 pagineViscosimetroAndres FernándezNessuna valutazione finora
- Schedule of Charges General Banking 2022Documento18 pagineSchedule of Charges General Banking 2022Shohag MahmudNessuna valutazione finora
- Exercise Manual For Course 973: Programming C# Extended Features: Hands-OnDocumento122 pagineExercise Manual For Course 973: Programming C# Extended Features: Hands-OnAdrian GorganNessuna valutazione finora
- CaseHistoriesOnTheApplication of Vacuum PreloadingDocumento25 pagineCaseHistoriesOnTheApplication of Vacuum PreloadingvaishnaviNessuna valutazione finora
- Feb 22-Additional CasesDocumento27 pagineFeb 22-Additional CasesYodh Jamin OngNessuna valutazione finora
- Sample Contract Rates MerchantDocumento2 pagineSample Contract Rates MerchantAlan BimantaraNessuna valutazione finora
- Broadband BillDocumento1 paginaBroadband BillKushi GowdaNessuna valutazione finora
- HetNet Solution Helps Telcos Improve User Experience & RevenueDocumento60 pagineHetNet Solution Helps Telcos Improve User Experience & RevenuefarrukhmohammedNessuna valutazione finora
- High Frequency Voltage Probe Non-Availability on GeMDocumento2 pagineHigh Frequency Voltage Probe Non-Availability on GeMjudeNessuna valutazione finora
- December 2018: Russian Journal of Agricultural and Socio-Economic SciencesDocumento339 pagineDecember 2018: Russian Journal of Agricultural and Socio-Economic Sciencesnahla saviraNessuna valutazione finora
- How To: Create A Clickable Table of Contents (TOC)Documento10 pagineHow To: Create A Clickable Table of Contents (TOC)Xuan Mai Nguyen ThiNessuna valutazione finora
- SEEPZ Special Economic ZoneDocumento2 pagineSEEPZ Special Economic ZonetarachandmaraNessuna valutazione finora
- How To Open and Convert An .SCM FileDocumento5 pagineHow To Open and Convert An .SCM FilejackNessuna valutazione finora
- Macdonald v. National City Bank of New YorkDocumento6 pagineMacdonald v. National City Bank of New YorkSecret SecretNessuna valutazione finora
- Activate Adobe Photoshop CS5 Free Using Serial KeyDocumento3 pagineActivate Adobe Photoshop CS5 Free Using Serial KeyLukmanto68% (28)
- What Role Can IS Play in The Pharmaceutical Industry?Documento4 pagineWhat Role Can IS Play in The Pharmaceutical Industry?Đức NguyễnNessuna valutazione finora
- Siyaram S AR 18-19 With Notice CompressedDocumento128 pagineSiyaram S AR 18-19 With Notice Compressedkhushboo rajputNessuna valutazione finora
- Norms and specifications for distribution transformer, DG set, street light poles, LED lights and high mast lightDocumento4 pagineNorms and specifications for distribution transformer, DG set, street light poles, LED lights and high mast lightKumar AvinashNessuna valutazione finora