Potrebbero piacerti anche
- CS 2401-Computer Graphics Unit - I: 2D Primitives and Line Drawing AlgorithmsDocumento84 pagineCS 2401-Computer Graphics Unit - I: 2D Primitives and Line Drawing AlgorithmsGanga DharanNessuna valutazione finora
- Hear50265 ch03Documento88 pagineHear50265 ch03Suada Bőw WéěžýNessuna valutazione finora
- 2D PRIMITIVES DRAWING ALGORITHMSDocumento263 pagine2D PRIMITIVES DRAWING ALGORITHMSRaj SankeerthNessuna valutazione finora
- Skyrim Mods 2Documento3 pagineSkyrim Mods 2Ineedit4Nessuna valutazione finora
- Computer Graphics - Lab Project 4: 2D TransformationDocumento4 pagineComputer Graphics - Lab Project 4: 2D TransformationZeeshan Bhatti100% (1)
- Digital Image Processing - DR - B.chandra MohanDocumento63 pagineDigital Image Processing - DR - B.chandra MohanPriyaNessuna valutazione finora
- MonsterDocumento224 pagineMonstertarator234Nessuna valutazione finora
- Skyrim ModlistDocumento14 pagineSkyrim ModlistLouise RitsonNessuna valutazione finora
- Linear Motion vs. Rotational MotionDocumento24 pagineLinear Motion vs. Rotational MotionSai DeepakNessuna valutazione finora
- Geometric TransformationsDocumento40 pagineGeometric TransformationssfundsNessuna valutazione finora
- UnitcircleprojectDocumento12 pagineUnitcircleprojectapi-261587850100% (1)
- FCPC NotesDocumento147 pagineFCPC Notesspeed_a5987100% (1)
- Matlab: The Language of Technical ComputingDocumento27 pagineMatlab: The Language of Technical Computingrauk83Nessuna valutazione finora
- Perk SkyrimDocumento5 paginePerk SkyrimAhmadBadawiKasyfurRahmanNessuna valutazione finora
- Bowling Ball Lab 2013-07-11Documento4 pagineBowling Ball Lab 2013-07-11sk112Nessuna valutazione finora
- No Silver Bullet, Essence and Accidents of Software EngineeringDocumento10 pagineNo Silver Bullet, Essence and Accidents of Software EngineeringInnocentSmith100% (2)
- Expt 1 - PHY433-430 - PHET Simulation - Vector - Oct 2020 PDFDocumento7 pagineExpt 1 - PHY433-430 - PHET Simulation - Vector - Oct 2020 PDFNurul AtikaNessuna valutazione finora
- Continuous Probability Distributions ExplainedDocumento45 pagineContinuous Probability Distributions ExplainedMNessuna valutazione finora
- Clip Algorithms in 40 CharactersDocumento29 pagineClip Algorithms in 40 CharactersThu VuNessuna valutazione finora
- Height of A Zero Gravity Parabolic Flight ProjectDocumento4 pagineHeight of A Zero Gravity Parabolic Flight Projectapi-253586910Nessuna valutazione finora
- Derivation of Kinematic Equations: View This After Motion On An Incline LabDocumento27 pagineDerivation of Kinematic Equations: View This After Motion On An Incline LabLeaRowenaCabugonNessuna valutazione finora
- A Review of Models and Structures For Wheeled Mobile Robots - Four Case StudiesDocumento6 pagineA Review of Models and Structures For Wheeled Mobile Robots - Four Case StudiesThanh NguyenNessuna valutazione finora
- Wolf AlgorithmDocumento30 pagineWolf AlgorithmvarshiNessuna valutazione finora
- Ray Tracing: A Guide to the Rendering TechniqueDocumento40 pagineRay Tracing: A Guide to the Rendering TechniqueManvi SoodNessuna valutazione finora
- Accurate of Digital Image Rotation Using MatlabDocumento7 pagineAccurate of Digital Image Rotation Using MatlabNi PramestiNessuna valutazione finora
- Bicomplex Holomorphic Functions - The Algebra, Geometry and Analysis of Bicomplex Numbers (PDFDrive)Documento231 pagineBicomplex Holomorphic Functions - The Algebra, Geometry and Analysis of Bicomplex Numbers (PDFDrive)Kritiraj Kalita100% (1)
- How To Draw A FurriesDocumento8 pagineHow To Draw A FurriesРоман Леонов0% (1)
- Performance Analysis of Contol Algorithms For FalconSat-3 - VergezDocumento18 paginePerformance Analysis of Contol Algorithms For FalconSat-3 - VergezGonzalo Rafael Landaeta CorderoNessuna valutazione finora
- Wolf EssayDocumento2 pagineWolf EssayJordan YanNessuna valutazione finora
- 2D Geometrical Transformations: Foley & Van Dam, Chapter 5Documento34 pagine2D Geometrical Transformations: Foley & Van Dam, Chapter 5Vincent VetterNessuna valutazione finora
- 2D TransformationDocumento38 pagine2D TransformationSarvodhya Bahri0% (1)
- Geom2d PDFDocumento13 pagineGeom2d PDFstalin1227Nessuna valutazione finora
- 2D Geometric Transformations: (Chapter 5 in FVD)Documento31 pagine2D Geometric Transformations: (Chapter 5 in FVD)Rukmani DeviNessuna valutazione finora
- CG 3Documento10 pagineCG 3sefefe hunegnawNessuna valutazione finora
- Projective Geometry-2d: AcknowledgementsDocumento13 pagineProjective Geometry-2d: AcknowledgementsRaleGarfildNessuna valutazione finora
- Unit IiiDocumento27 pagineUnit IiiLee CangNessuna valutazione finora
- 2 D TransformationDocumento43 pagine2 D TransformationNilesh RanaNessuna valutazione finora
- 2D Geometrical Transformations: Foley & Van Dam, Chapter 5Documento34 pagine2D Geometrical Transformations: Foley & Van Dam, Chapter 5Ashutosh JhaNessuna valutazione finora
- Unit 2 - Part 1Documento74 pagineUnit 2 - Part 1A1FA MSKNessuna valutazione finora
- Introduction To Computer Graphics CS 445 / 645: TransformationsDocumento52 pagineIntroduction To Computer Graphics CS 445 / 645: TransformationsVasantha Kumar .VNessuna valutazione finora
- Quiz 7: - Explain Your Answers Clearly. Credit Will Be Given Only If You Provide Sufficient JustificationDocumento2 pagineQuiz 7: - Explain Your Answers Clearly. Credit Will Be Given Only If You Provide Sufficient JustificationMartinI.IseckNessuna valutazione finora
- COMPUTER GRAPHICS TRANSFORMATIONDocumento14 pagineCOMPUTER GRAPHICS TRANSFORMATIONsdfNessuna valutazione finora
- Computer Graphics: Lecture #6 2D Geometric TransformationsDocumento81 pagineComputer Graphics: Lecture #6 2D Geometric TransformationssahuashishcsNessuna valutazione finora
- Matrices - Addition: 2D Transformations Nihar Ranjan Roy +Documento7 pagineMatrices - Addition: 2D Transformations Nihar Ranjan Roy +GauravArjariaNessuna valutazione finora
- Module 3- 2D Transformations_1Documento91 pagineModule 3- 2D Transformations_1Rajeswari RNessuna valutazione finora
- Unit – III 2D TransformationsDocumento48 pagineUnit – III 2D Transformationspankajchandre30Nessuna valutazione finora
- Cim 23.6Documento81 pagineCim 23.6RajeshKumarNessuna valutazione finora
- FunctionDocumento35 pagineFunctionDae DayNessuna valutazione finora
- Chapter Five GraphicsDocumento37 pagineChapter Five GraphicswalelegneNessuna valutazione finora
- Guru Ghasidas University Mechanical Engineering 2D Geometric TransformationsDocumento69 pagineGuru Ghasidas University Mechanical Engineering 2D Geometric TransformationsRavish SharmaNessuna valutazione finora
- Introduction To Computer Graphics CS 445 / 645: TransformationsDocumento52 pagineIntroduction To Computer Graphics CS 445 / 645: TransformationsRehan HalaiNessuna valutazione finora
- 06 TransformationDocumento56 pagine06 TransformationMuntasir FahimNessuna valutazione finora
- Recovering metric and affine properties from images using projective geometryDocumento32 pagineRecovering metric and affine properties from images using projective geometryNagarjun AkellaNessuna valutazione finora
- 2D Coordinate Transformations Nick Battjes, Senior Student: Spatial Data Without Coordinates Control PointsDocumento33 pagine2D Coordinate Transformations Nick Battjes, Senior Student: Spatial Data Without Coordinates Control PointsRamo Kiss100% (2)
- BLOCK 2 Computer Graphics IgnouDocumento87 pagineBLOCK 2 Computer Graphics IgnouDanielle PerryNessuna valutazione finora
- CG Chapter 5Documento61 pagineCG Chapter 5kiramelaku1Nessuna valutazione finora
- Three Dimensional Space: Coordinate SystemDocumento82 pagineThree Dimensional Space: Coordinate Systemlzyabc597Nessuna valutazione finora
- CAED KJHA 2d TransformationDocumento114 pagineCAED KJHA 2d TransformationAnu SinghNessuna valutazione finora
- CSE455 6 (2d-Transform)Documento32 pagineCSE455 6 (2d-Transform)Ankit AwalNessuna valutazione finora
- Wing Hong Tony Wong: ND THDocumento7 pagineWing Hong Tony Wong: ND THPeterNessuna valutazione finora
- ZeeshanAcademy Registration Form and Fees Structure 2Documento2 pagineZeeshanAcademy Registration Form and Fees Structure 2Zeeshan Bhatti100% (1)
- IT Project Management Chapter 6 Project ImplementationDocumento25 pagineIT Project Management Chapter 6 Project ImplementationZeeshan BhattiNessuna valutazione finora
- BS Software Engineering (Morning) Final Year Projects Proposal Final List.Documento2 pagineBS Software Engineering (Morning) Final Year Projects Proposal Final List.Zeeshan BhattiNessuna valutazione finora
- IT Project Management: Chapter 5 Risk ManagemntDocumento31 pagineIT Project Management: Chapter 5 Risk ManagemntZeeshan BhattiNessuna valutazione finora
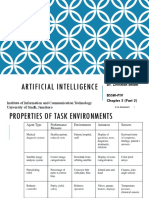
- Artificial Intelligence: Chapter 5 - Machine LearningDocumento30 pagineArtificial Intelligence: Chapter 5 - Machine LearningZeeshan BhattiNessuna valutazione finora
- BS Information Technology (Morning) Final Year Projects Proposal Final Approval List.Documento2 pagineBS Information Technology (Morning) Final Year Projects Proposal Final Approval List.Zeeshan Bhatti100% (2)
- BS Software Engineering (Evening) Final Year Projects Proposal Final List.Documento1 paginaBS Software Engineering (Evening) Final Year Projects Proposal Final List.Zeeshan BhattiNessuna valutazione finora
- BS Electronics Final Year Projects Proposal Final Aproval List.Documento1 paginaBS Electronics Final Year Projects Proposal Final Aproval List.Zeeshan BhattiNessuna valutazione finora
- BS Informatin Technology (Evening) Final Year Projects Proposal Final List.Documento2 pagineBS Informatin Technology (Evening) Final Year Projects Proposal Final List.Zeeshan BhattiNessuna valutazione finora
- BS Telecommunication Final Year Projects Proposal Final Approval List.Documento1 paginaBS Telecommunication Final Year Projects Proposal Final Approval List.Zeeshan Bhatti0% (1)
- IT Project Management: Chapter 4 Resource Plan and Cost EstimationDocumento44 pagineIT Project Management: Chapter 4 Resource Plan and Cost EstimationZeeshan BhattiNessuna valutazione finora
- BSIT (Evening) Final Year Projects Proposal Evaluation ReportDocumento3 pagineBSIT (Evening) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNessuna valutazione finora
- IT Project Management - Chapter 3 Project Estimating Techniques and ToolsDocumento73 pagineIT Project Management - Chapter 3 Project Estimating Techniques and ToolsZeeshan BhattiNessuna valutazione finora
- Artificial Intelligence: Chapter 4 Introduction To Knowledge Base SystemsDocumento20 pagineArtificial Intelligence: Chapter 4 Introduction To Knowledge Base SystemsZeeshan BhattiNessuna valutazione finora
- Artificial Intelligence Chapter 3: Problem Solving and SearchingDocumento94 pagineArtificial Intelligence Chapter 3: Problem Solving and SearchingZeeshan Bhatti100% (1)
- Computer Graphics - Chapter 3 Solid Area Polygon FillingDocumento13 pagineComputer Graphics - Chapter 3 Solid Area Polygon FillingZeeshan BhattiNessuna valutazione finora
- Artificial Intelligence - Chapter 2 Agents and Rational Agents Part IIDocumento32 pagineArtificial Intelligence - Chapter 2 Agents and Rational Agents Part IIZeeshan BhattiNessuna valutazione finora
- BSIT (Morning) Final Year Projects Proposal Evaluation ReportDocumento3 pagineBSIT (Morning) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNessuna valutazione finora
- BSSW (Evening) Final Year Projects Proposal Evaluation ReportDocumento2 pagineBSSW (Evening) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNessuna valutazione finora
- BSSW (Morning) Final Year Projects Proposal Evaluation ReportDocumento2 pagineBSSW (Morning) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNessuna valutazione finora
- BSTC Morning PrjEvalDocumento2 pagineBSTC Morning PrjEvalZeeshan BhattiNessuna valutazione finora
- Chapter 2 - IPM - Developing Project PlanDocumento72 pagineChapter 2 - IPM - Developing Project PlanZeeshan BhattiNessuna valutazione finora
- BSEL Morning PrjEvalDocumento2 pagineBSEL Morning PrjEvalZeeshan BhattiNessuna valutazione finora
- Lecture 1 - Introduction To IT Project ManagementDocumento51 pagineLecture 1 - Introduction To IT Project ManagementZeeshan BhattiNessuna valutazione finora
- IICT Final Year Project Result 2K12 BatchDocumento13 pagineIICT Final Year Project Result 2K12 BatchZeeshan BhattiNessuna valutazione finora
- Artificial Intelligence: Chapter 2 Week 2 and 3Documento43 pagineArtificial Intelligence: Chapter 2 Week 2 and 3Zeeshan Bhatti100% (1)
- Final Year Projects Exhibition Notification 2015Documento1 paginaFinal Year Projects Exhibition Notification 2015Zeeshan BhattiNessuna valutazione finora
- DIP Lab Manual No 04Documento12 pagineDIP Lab Manual No 04myfirstNessuna valutazione finora
- Affine TransformationDocumento4 pagineAffine Transformationcircleteam123Nessuna valutazione finora
- 2D Geometric Transformations: CS-1206 Course Coordinator Dr. Badal SoniDocumento35 pagine2D Geometric Transformations: CS-1206 Course Coordinator Dr. Badal SoniKaran SingNessuna valutazione finora
- FME Transformer Reference GuideDocumento128 pagineFME Transformer Reference GuideMladenNessuna valutazione finora
- Module 2 - FullDocumento137 pagineModule 2 - Fullsuma_hari6244Nessuna valutazione finora
- Mobile Robots Perception NavigationDocumento704 pagineMobile Robots Perception NavigationCarlos Morones HernándezNessuna valutazione finora
- MATH32062 Notes on Affine Algebraic VarietiesDocumento87 pagineMATH32062 Notes on Affine Algebraic Varietiesdanish123hafeezNessuna valutazione finora
- Clipping Window TransformationsDocumento50 pagineClipping Window TransformationsGold RogerNessuna valutazione finora
- MATH 441 Advanced Calculus Lecture NotesDocumento122 pagineMATH 441 Advanced Calculus Lecture NotesDerrick Akwasi AmankwahNessuna valutazione finora
- Affine GeometryDocumento60 pagineAffine GeometrySSNessuna valutazione finora
- Waveglow: A Flow-Based Generative Network For Speech Synthesis Ryan Prenger, Rafael Valle, Bryan Catanzaro NVIDIA CorporationDocumento5 pagineWaveglow: A Flow-Based Generative Network For Speech Synthesis Ryan Prenger, Rafael Valle, Bryan Catanzaro NVIDIA CorporationAbu SufiunNessuna valutazione finora
- Tesfamichael GebregziabherDocumento125 pagineTesfamichael GebregziabherWubieNessuna valutazione finora
- PCD W03S02 Arithmetic and Logic OperationsDocumento20 paginePCD W03S02 Arithmetic and Logic OperationsPaian SimarmataNessuna valutazione finora
- EE 103 Homework 2 SolutionsDocumento3 pagineEE 103 Homework 2 SolutionsLucky DeltaNessuna valutazione finora
- 06 Matrix Lie Groups LongDocumento76 pagine06 Matrix Lie Groups LongShubham SinghNessuna valutazione finora
- 1.2. General Introduction To The Subgroups of Space Groups: by Hans WondratschekDocumento18 pagine1.2. General Introduction To The Subgroups of Space Groups: by Hans WondratschekbzvzvbNessuna valutazione finora
- Chapter 5 TransformationsDocumento7 pagineChapter 5 Transformationsdenis kipkiruiNessuna valutazione finora
- Geometric TransformationsDocumento40 pagineGeometric TransformationssfundsNessuna valutazione finora
- Group1 - Minor - ProjectDocumento31 pagineGroup1 - Minor - ProjectsibohegitNessuna valutazione finora
- Tutorial On Helmholtz MachineDocumento26 pagineTutorial On Helmholtz MachineNon SenseNessuna valutazione finora
- CG Module 3Documento49 pagineCG Module 3Jnanavi B ANessuna valutazione finora
- Exercicio Selecionados - Primeira AvaliaçãoDocumento19 pagineExercicio Selecionados - Primeira AvaliaçãoThao TranNessuna valutazione finora
- Aula de OpenGLDocumento149 pagineAula de OpenGLLais LodiNessuna valutazione finora
- SEE: Towards Semi-Supervised End-to-End Scene Text RecognitionDocumento8 pagineSEE: Towards Semi-Supervised End-to-End Scene Text RecognitionOdgiiv KhNessuna valutazione finora
- Image Deformation Using Moving Least SquaresDocumento8 pagineImage Deformation Using Moving Least SquaresBui Minh TuanNessuna valutazione finora
- Model ComponentDocumento15 pagineModel ComponentDaniel ChenNessuna valutazione finora
- EWA Volume Splatting: in Proceedings of IEEE Visualization 2001, October 2001. San Diego, CADocumento10 pagineEWA Volume Splatting: in Proceedings of IEEE Visualization 2001, October 2001. San Diego, CAraydonalNessuna valutazione finora