Potrebbero piacerti anche
- Ains 21 Property and Liability Insurance 5th Edition - 5anqyzb PDFDocumento2 pagineAins 21 Property and Liability Insurance 5th Edition - 5anqyzb PDFStephen Raj0% (2)
- Siemens PLM Teamcenter Supplier Collaboration Fs Tcm1023 230836Documento2 pagineSiemens PLM Teamcenter Supplier Collaboration Fs Tcm1023 230836Ashwin RaghavanNessuna valutazione finora
- Siemens PLM Teamcenter Supplier Collaboration Fs Tcm1023 230836Documento2 pagineSiemens PLM Teamcenter Supplier Collaboration Fs Tcm1023 230836Ashwin RaghavanNessuna valutazione finora
- Arduino Example - Stepper Motor Example - Discussion Forums - National InstrumentsDocumento13 pagineArduino Example - Stepper Motor Example - Discussion Forums - National InstrumentsMihai BogdanNessuna valutazione finora
- DevOps. How to build pipelines with Jenkins, Docker container, AWS ECS, JDK 11, git and maven 3?Da EverandDevOps. How to build pipelines with Jenkins, Docker container, AWS ECS, JDK 11, git and maven 3?Nessuna valutazione finora
- Protecting and Enforcing Software InnovationDocumento96 pagineProtecting and Enforcing Software InnovationRobert PopescuNessuna valutazione finora
- BTEC Level 3 National Business - Unit 19Documento40 pagineBTEC Level 3 National Business - Unit 19spaghettipaulNessuna valutazione finora
- Code Blocks SourceForgeDocumento2 pagineCode Blocks SourceForgesabar5Nessuna valutazione finora
- KamikazeDocumento16 pagineKamikazekarz03160Nessuna valutazione finora
- Control Your Arduino From Your PC With The QT GuiDocumento10 pagineControl Your Arduino From Your PC With The QT GuiAlanNessuna valutazione finora
- Lab 9 6 3 Eigrp Troubleshooting Lab AnswersDocumento4 pagineLab 9 6 3 Eigrp Troubleshooting Lab AnswersBerthaFlores100% (1)
- Bug Fixes: Ninja File Generation With CmakeDocumento1 paginaBug Fixes: Ninja File Generation With CmakesandeepNessuna valutazione finora
- IoulistDocumento4 pagineIoulistnipo809Nessuna valutazione finora
- Edit Code - EDA PlaygroundDocumento3 pagineEdit Code - EDA PlaygroundjagyanjitNessuna valutazione finora
- Project - Drive Motor Using L293D - SN754410 - FritzingDocumento3 pagineProject - Drive Motor Using L293D - SN754410 - FritzingfgaluppoNessuna valutazione finora
- READMEDocumento2 pagineREADMEandrewtherockNessuna valutazione finora
- CHANGESDocumento142 pagineCHANGESIrsan RamliNessuna valutazione finora
- DigitalDocumento60 pagineDigitalawadhesh.kumarNessuna valutazione finora
- CHANGESDocumento130 pagineCHANGESneematoriumNessuna valutazione finora
- Arduino Example - LCD 4-Wire Example - Discussion Forums - National InstrumentsDocumento3 pagineArduino Example - LCD 4-Wire Example - Discussion Forums - National InstrumentsMihai BogdanNessuna valutazione finora
- 16.1.2 Lab - Implement A GRE Tunnel - ITExamAnswersDocumento20 pagine16.1.2 Lab - Implement A GRE Tunnel - ITExamAnswershayltonmonteiroNessuna valutazione finora
- IoulistDocumento4 pagineIoulistcocacolo78Nessuna valutazione finora
- Dr.G.Senthil Kumar - VLSI - Design - LabDocumento121 pagineDr.G.Senthil Kumar - VLSI - Design - LabNilesh VermaNessuna valutazione finora
- Software ConsiderationDocumento23 pagineSoftware ConsiderationAndrés RocaNessuna valutazione finora
- Pi Spi EepromDocumento4 paginePi Spi EepromkkdddennisNessuna valutazione finora
- Ipblock For UbuntuDocumento5 pagineIpblock For Ubuntuaqtu12fucNessuna valutazione finora
- 16.1.2 Lab - Implement A GRE Tunnel - ILMDocumento20 pagine16.1.2 Lab - Implement A GRE Tunnel - ILMAndrei Petru PârvNessuna valutazione finora
- ChangelogDocumento27 pagineChangelogDanielNessuna valutazione finora
- Wlan Soc Für Das Internet of Things Pi and More 7 Nico MaasDocumento30 pagineWlan Soc Für Das Internet of Things Pi and More 7 Nico MaasdanielNessuna valutazione finora
- Implementation of 8 Bit Alu in Fpga: EX - NO. 1 DATE: 11-2-2010Documento109 pagineImplementation of 8 Bit Alu in Fpga: EX - NO. 1 DATE: 11-2-2010Rajeshkumar KamarajNessuna valutazione finora
- CHANGESDocumento132 pagineCHANGESAnderson AguiarNessuna valutazione finora
- Webfpga Docs Table of Contents Chapter 1 - Webfpga Quick Start GuidesDocumento47 pagineWebfpga Docs Table of Contents Chapter 1 - Webfpga Quick Start GuidesyayaNessuna valutazione finora
- AssgnStmt 01Documento1 paginaAssgnStmt 01Abinash sonowalNessuna valutazione finora
- Artix7 Verilog Word FileDocumento7 pagineArtix7 Verilog Word FileSwapna SarkerNessuna valutazione finora
- 8.1.3.4 Packet Tracer - Propagating A Default Route in EIGRP For IPv4 and IPv6 Instructions IGDocumento4 pagine8.1.3.4 Packet Tracer - Propagating A Default Route in EIGRP For IPv4 and IPv6 Instructions IGjbetancur_77100% (1)
- 555 DC Motor Speed ControlDocumento8 pagine555 DC Motor Speed ControlEward KenNessuna valutazione finora
- O InstalarDocumento3 pagineO InstalarTom OjuaraNessuna valutazione finora
- NI Tutorial 12950 enDocumento15 pagineNI Tutorial 12950 enTran Van ThucNessuna valutazione finora
- CCNP Advanced Routing 4Documento29 pagineCCNP Advanced Routing 4minhlililiNessuna valutazione finora
- FluxionDocumento5 pagineFluxionJamesMarshallNessuna valutazione finora
- MATLAB Support Package For Arduino (Aka ArduinoIO Package) - File Exchange - MATLAB CentralDocumento8 pagineMATLAB Support Package For Arduino (Aka ArduinoIO Package) - File Exchange - MATLAB CentralclaytoncageNessuna valutazione finora
- Druid 4 ArduinoDocumento8 pagineDruid 4 ArduinoYorvic GodoyNessuna valutazione finora
- 7.1.3.4 Packet Tracer - Propagating A Default Route in EIGRP For IPv4 and IPv6 InstructionsDocumento2 pagine7.1.3.4 Packet Tracer - Propagating A Default Route in EIGRP For IPv4 and IPv6 InstructionsJessica Gregory0% (1)
- Arduino Example - Continuous Sampling Example - Discussion Forums - National InstrumentsDocumento3 pagineArduino Example - Continuous Sampling Example - Discussion Forums - National InstrumentsMihai BogdanNessuna valutazione finora
- 03 Git ImmersionDocumento23 pagine03 Git ImmersionМихаило ЛукићNessuna valutazione finora
- Scriptler Plugin: DescriptionDocumento7 pagineScriptler Plugin: DescriptiongvcsvgNessuna valutazione finora
- Building IbootDocumento8 pagineBuilding IbootAvoine CheyNessuna valutazione finora
- CommandsDocumento4 pagineCommandscidBookBeeNessuna valutazione finora
- How To Cross Compile A Binary For IdevicesDocumento3 pagineHow To Cross Compile A Binary For IdeviceschuiyewleongNessuna valutazione finora
- Slackware Arm On The Raspberry Pi 3Documento5 pagineSlackware Arm On The Raspberry Pi 3kxkxkNessuna valutazione finora
- STM32 Ethernet Start Point 20180307Documento17 pagineSTM32 Ethernet Start Point 20180307marcor08100% (1)
- Codigo para Tiva CDocumento3 pagineCodigo para Tiva CAndres GonzalezNessuna valutazione finora
- Bus Pirate JTAG XSVF Player - DPDocumento9 pagineBus Pirate JTAG XSVF Player - DPMarcelloRodriguesMendonçaNessuna valutazione finora
- 5.1.2 Lab - Implement EIGRP For IPv6Documento20 pagine5.1.2 Lab - Implement EIGRP For IPv6manuelNessuna valutazione finora
- BuildDocumento5 pagineBuildJose ToledoNessuna valutazione finora
- ReadmeDocumento3 pagineReadmeEnrico Le NociNessuna valutazione finora
- ROACHII Production Test Machine SetupDocumento9 pagineROACHII Production Test Machine SetupUlloa JavierNessuna valutazione finora
- Image Detection With Lazarus: Maxbox Starter87 With CaiDocumento22 pagineImage Detection With Lazarus: Maxbox Starter87 With CaiMax Kleiner100% (1)
- 10.1.2 Lab - Implement Multiarea OSPFv3Documento20 pagine10.1.2 Lab - Implement Multiarea OSPFv3Trung Nguyễn ĐứcNessuna valutazione finora
- Dogecoin Core (DOGE, Ð) : What Is Dogecoin? - Such CoinDocumento5 pagineDogecoin Core (DOGE, Ð) : What Is Dogecoin? - Such CoinAvanish VermaNessuna valutazione finora
- P51 - Lab 1, Introduction To Netfpga: DR Noa Zilberman Lent, 2018/19Documento15 pagineP51 - Lab 1, Introduction To Netfpga: DR Noa Zilberman Lent, 2018/19Yatheesh KaggereNessuna valutazione finora
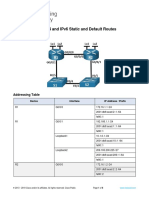
- Practicas - Cisco - 2 - Practica 10 - 15.6.2-Lab - Configure-Ipv4-And-Ipv6-Static-And-Default-RoutesDocumento9 paginePracticas - Cisco - 2 - Practica 10 - 15.6.2-Lab - Configure-Ipv4-And-Ipv6-Static-And-Default-Routespiro dt0% (1)
- IoulistDocumento4 pagineIoulisthaji85Nessuna valutazione finora
- BGP Lab 4 - Implement BGP CommunitiesDocumento17 pagineBGP Lab 4 - Implement BGP CommunitiesSam A. SalmanNessuna valutazione finora
- Simple Guide To SrIvaishNavam-EnglishDocumento70 pagineSimple Guide To SrIvaishNavam-EnglishAshwin Raghavan100% (1)
- Coupling Motor Carriage ScrewDocumento4 pagineCoupling Motor Carriage ScrewBoşluk SuratNessuna valutazione finora
- FullText - Study 838940Documento11 pagineFullText - Study 838940Ashwin RaghavanNessuna valutazione finora
- Thomson BSA Lead and Ball Screws CtenDocumento96 pagineThomson BSA Lead and Ball Screws CtenAshwin RaghavanNessuna valutazione finora
- 12 VOICE Newsletter Aug 2017Documento12 pagine12 VOICE Newsletter Aug 2017Ashwin RaghavanNessuna valutazione finora
- Precision Control of High SpeedDocumento147 paginePrecision Control of High SpeedAbhishek A. GumajNessuna valutazione finora
- Whatsnew SW2016Documento234 pagineWhatsnew SW2016นาย โต้งNessuna valutazione finora
- NC CodesDocumento6 pagineNC CodesSayeed AndrabiNessuna valutazione finora
- Design of Gantry Robot - BDUDocumento72 pagineDesign of Gantry Robot - BDUAshwin RaghavanNessuna valutazione finora
- Damping Properties of MaterialsDocumento6 pagineDamping Properties of MaterialsSushant RakhejaNessuna valutazione finora
- Unit I Power Semiconductor DevicesDocumento100 pagineUnit I Power Semiconductor DevicesAshwin RaghavanNessuna valutazione finora
- 1.single Phase AC To DC Fully Controlled Converter PDFDocumento10 pagine1.single Phase AC To DC Fully Controlled Converter PDFAshwin RaghavanNessuna valutazione finora
- Motion Analysis Sim MechanicsDocumento11 pagineMotion Analysis Sim MechanicsOscar De SilvaNessuna valutazione finora
- 2016 EBaja SAE India RulesDocumento84 pagine2016 EBaja SAE India RulesAshwin RaghavanNessuna valutazione finora
- Motion Analysis Sim MechanicsDocumento11 pagineMotion Analysis Sim MechanicsOscar De SilvaNessuna valutazione finora
- Motion Analysis Sim MechanicsDocumento11 pagineMotion Analysis Sim MechanicsOscar De SilvaNessuna valutazione finora
- Unit I Power Semiconductor DevicesDocumento100 pagineUnit I Power Semiconductor DevicesAshwin RaghavanNessuna valutazione finora
- Motion Analysis Sim MechanicsDocumento11 pagineMotion Analysis Sim MechanicsOscar De SilvaNessuna valutazione finora
- Control System Engineering U A BakshiDocumento835 pagineControl System Engineering U A Bakshikumara_raja1980% (95)
- Ex - No:6 Interfacing Adc With 0809 Using 8085 Microprocessor AimDocumento6 pagineEx - No:6 Interfacing Adc With 0809 Using 8085 Microprocessor AimAshwin RaghavanNessuna valutazione finora
- Efficient Control of DC Servomotor Systems Using BackpropagationDocumento73 pagineEfficient Control of DC Servomotor Systems Using BackpropagationParmodDhandaNessuna valutazione finora
- Process Planning and Cost EstimationDocumento7 pagineProcess Planning and Cost EstimationMariappan ArumugamNessuna valutazione finora
- Adams Basic Syllabus - 5 Days PDFDocumento3 pagineAdams Basic Syllabus - 5 Days PDFAshwin RaghavanNessuna valutazione finora
- Krishna ConsciousnessDocumento285 pagineKrishna ConsciousnessAshwin RaghavanNessuna valutazione finora
- How To Study For GATEDocumento4 pagineHow To Study For GATEAshwin RaghavanNessuna valutazione finora
- Mic 2514Documento6 pagineMic 2514Ashwin RaghavanNessuna valutazione finora
- Power-Management Ics For Single-Cell, Li+ Battery-Operated DevicesDocumento34 paginePower-Management Ics For Single-Cell, Li+ Battery-Operated DevicesAshwin RaghavanNessuna valutazione finora
- The Uol - CVDocumento2 pagineThe Uol - CVjunaid_qudratNessuna valutazione finora
- Ubuntu Linux Guide For d50 LibrarianDocumento5 pagineUbuntu Linux Guide For d50 LibrarianOdair de SouzaNessuna valutazione finora
- ESA Software Engineering StandardsDocumento956 pagineESA Software Engineering Standardsakmding100% (1)
- Offline Typing Project WorkDocumento2 pagineOffline Typing Project WorkUsman al-HassamNessuna valutazione finora
- CDH 4e CH5 Ada PDF 1P Aug2016Documento11 pagineCDH 4e CH5 Ada PDF 1P Aug2016blisscutest beagleNessuna valutazione finora
- The Englishman S Hebrew and Chaldee Vol IDocumento788 pagineThe Englishman S Hebrew and Chaldee Vol IOscar DíazNessuna valutazione finora
- SkyCiv Beam ReportDocumento3 pagineSkyCiv Beam ReportLaurentNessuna valutazione finora
- 12 Behold - Our - God - Rec - Score PDFDocumento3 pagine12 Behold - Our - God - Rec - Score PDFSam HannaNessuna valutazione finora
- War As I Knew ItDocumento2 pagineWar As I Knew ItShreyansNessuna valutazione finora
- Oberon 1Documento321 pagineOberon 1Grandfather NurgleNessuna valutazione finora
- All-State Boys VolleyballDocumento1 paginaAll-State Boys VolleyballHonolulu Star-AdvertiserNessuna valutazione finora
- Unit Iv Intellectual Property RightsDocumento18 pagineUnit Iv Intellectual Property RightsjanNessuna valutazione finora
- Making Money With AutopilotDocumento4 pagineMaking Money With AutopilotStefanoNessuna valutazione finora
- DSM - 0150 DSM System Expansion Joint 3D DWF FileDocumento1 paginaDSM - 0150 DSM System Expansion Joint 3D DWF FileJoaquin TemiqueltNessuna valutazione finora
- CMDT 391-K-SL - 20230225Documento2 pagineCMDT 391-K-SL - 20230225ali naqviNessuna valutazione finora
- 027 Btech (Cse) May15Documento224 pagine027 Btech (Cse) May15Om SharmaNessuna valutazione finora
- Remedy Applicatin PermissionsDocumento75 pagineRemedy Applicatin PermissionsVenkat SNessuna valutazione finora
- Section 4. Definitions. - 4.1. The Term "Intellectual Property Rights" Consists ofDocumento5 pagineSection 4. Definitions. - 4.1. The Term "Intellectual Property Rights" Consists ofJesa BayonetaNessuna valutazione finora
- Archmodels Vol 263Documento18 pagineArchmodels Vol 263R.T.Nessuna valutazione finora
- e StatementBRImo 768601011348507 Aug2023 20230911 180619Documento19 paginee StatementBRImo 768601011348507 Aug2023 20230911 180619EgaaPutra007 PutraNessuna valutazione finora
- Christian Locussol: Arranger, Interpreter, Teacher FranceDocumento3 pagineChristian Locussol: Arranger, Interpreter, Teacher FranceEdvaldo Luis SbrissaNessuna valutazione finora
- From Printing Press To Web 2.0Documento2 pagineFrom Printing Press To Web 2.0GiwolNessuna valutazione finora
- (BS 848-2.6 - 2000) - Fans For General Purposes. Methods of Noise Testing. Airborne Noise Emitted by Small Air-Moving Devices PDFDocumento30 pagine(BS 848-2.6 - 2000) - Fans For General Purposes. Methods of Noise Testing. Airborne Noise Emitted by Small Air-Moving Devices PDFMarianaNessuna valutazione finora
- RegisterDevice RDServiceExt WebClientDocumento13 pagineRegisterDevice RDServiceExt WebClientSMBTAV & SN DC VEERAVASARAMNessuna valutazione finora
- Floor Area Measurement Best Practices #23Documento1 paginaFloor Area Measurement Best Practices #23ken kerchNessuna valutazione finora
- Ericsson V Apple Complaint Filing TwoDocumento23 pagineEricsson V Apple Complaint Filing TwoMike WuertheleNessuna valutazione finora
- Jconnect LICENSEDocumento2 pagineJconnect LICENSEGredy Dennis Melendez AvilesNessuna valutazione finora