Potrebbero piacerti anche
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDa EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosValutazione: 4.5 su 5 stelle4.5/5 (14)
- Ciencias Terrestres - FINAL REVISADODocumento91 pagineCiencias Terrestres - FINAL REVISADODiego Lopez100% (5)
- Taramps HD3000 R9 PDFDocumento5 pagineTaramps HD3000 R9 PDFLucio Oliveira100% (2)
- PFC y bloque MULTIDocumento2 paginePFC y bloque MULTIAntonio Chavez90% (40)
- 100 Circuitos de Potencia con SCRs y TriacsDa Everand100 Circuitos de Potencia con SCRs y TriacsValutazione: 3 su 5 stelle3/5 (5)
- Simulación de circuitos electrónicos con OrCAD® PSpice®Da EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Nessuna valutazione finora
- KV-24FS100/25FS100 board schematicDocumento1 paginaKV-24FS100/25FS100 board schematicoscarmdNessuna valutazione finora
- Microcontrolador PIC 16f84aDocumento26 pagineMicrocontrolador PIC 16f84aaoh1226Nessuna valutazione finora
- Amp D 2.amplificadores OperacionalesDocumento1 paginaAmp D 2.amplificadores OperacionalesBerthaFloresNessuna valutazione finora
- Fuente Regulada ESQUEMADocumento1 paginaFuente Regulada ESQUEMADaniel ZabalaNessuna valutazione finora
- Interconexión de Un Exhibidor Alfanumérico, de Cristal LiquidoDocumento9 pagineInterconexión de Un Exhibidor Alfanumérico, de Cristal Liquidolgrome73Nessuna valutazione finora
- Dimmer Digital Con Microcontrolador PIC.Documento1 paginaDimmer Digital Con Microcontrolador PIC.Alfre2Alcazar100% (4)
- Noblex MNX-2900 Minicomponente de Audio Con CD-Mp3-USB DiagramasDocumento7 pagineNoblex MNX-2900 Minicomponente de Audio Con CD-Mp3-USB DiagramasAlejandro GandulfoNessuna valutazione finora
- Sistema Mínimo de Una Computadora o MicrocontroladorDocumento1 paginaSistema Mínimo de Una Computadora o MicrocontroladorAlfre2AlcazarNessuna valutazione finora
- FUENTE SIMETRICA REGULADA VARIABLE CON LM317 Y LM337 + - 1.2V A + - 30VDocumento3 pagineFUENTE SIMETRICA REGULADA VARIABLE CON LM317 Y LM337 + - 1.2V A + - 30VPere Egolatra AlterNessuna valutazione finora
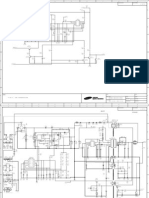
- Samsung Bn44-00356a Inverter SCHDocumento3 pagineSamsung Bn44-00356a Inverter SCHazaromeroNessuna valutazione finora
- Programador/Lector Manual de Memorias UV-EPROMDocumento1 paginaProgramador/Lector Manual de Memorias UV-EPROMAlfre2Alcazar100% (2)
- Control de velocidad de motor con PWM usando PIC16F877ADocumento7 pagineControl de velocidad de motor con PWM usando PIC16F877APanchosucuNessuna valutazione finora
- Bascula Adc 16f877a PicDocumento4 pagineBascula Adc 16f877a PicYevgeni SmithNessuna valutazione finora
- 065ARPLDocumento11 pagine065ARPLalbertNessuna valutazione finora
- Presentacion Entrenador PICDocumento4 paginePresentacion Entrenador PICCarlos SierraNessuna valutazione finora
- Control de Motores en PROTON BASICDocumento27 pagineControl de Motores en PROTON BASICblanksoriavNessuna valutazione finora
- Informe-Proyecto de Tacometro DigitalDocumento29 pagineInforme-Proyecto de Tacometro DigitalBrian CwNessuna valutazione finora
- Curso Pic1Documento110 pagineCurso Pic1Jesus AponteNessuna valutazione finora
- Guia de Lab 3 - InterrupcionDocumento3 pagineGuia de Lab 3 - InterrupcionDaniel EstradaNessuna valutazione finora
- 18F67J50Trainer V1.0Documento1 pagina18F67J50Trainer V1.0wellsuNessuna valutazione finora
- Plano Behringer Pmp6000Documento15 paginePlano Behringer Pmp6000Alejandro Munoz0% (1)
- Examen PACDocumento9 pagineExamen PACGeorge CristianNessuna valutazione finora
- 2.3 Ejem de Reg W y Programa Secuencia de LedsDocumento9 pagine2.3 Ejem de Reg W y Programa Secuencia de LedsOmar Navia CondoriNessuna valutazione finora
- Contador 0-99 con display 7 segmentosDocumento8 pagineContador 0-99 con display 7 segmentosJulio LópezNessuna valutazione finora
- O y M Manual R-ccm-36!9!11 DivididoDocumento8 pagineO y M Manual R-ccm-36!9!11 Divididosandoval29Nessuna valutazione finora
- Robot Seguidor de Linea Blanca Sobre Fondo NegroDocumento4 pagineRobot Seguidor de Linea Blanca Sobre Fondo Negrojuanka209Nessuna valutazione finora
- Manual Ep 450 EspañolDocumento72 pagineManual Ep 450 EspañolAndres Mauricio Gonzalez CardonaNessuna valutazione finora
- Ensamble y Ajuste Indicadores MCIL2 - DEFDocumento12 pagineEnsamble y Ajuste Indicadores MCIL2 - DEFRonald AlarconNessuna valutazione finora
- Fuente de Alimentación Con KA7552Documento1 paginaFuente de Alimentación Con KA7552rgonzalgNessuna valutazione finora
- Cronometro PIC16F877 planta electricaDocumento5 pagineCronometro PIC16F877 planta electricahennyNessuna valutazione finora
- Electronica FacilDocumento231 pagineElectronica FacilGaribay Lui100% (1)
- Esquema de circuito para controlador USB con microcontrolador ATmega328Documento1 paginaEsquema de circuito para controlador USB con microcontrolador ATmega328Javier Dorado SánchezNessuna valutazione finora
- Programacion PIC18 en CDocumento40 pagineProgramacion PIC18 en CEsam PcarrascoNessuna valutazione finora
- Diagrama de ConexionDocumento1 paginaDiagrama de ConexionMisael HdezNessuna valutazione finora
- Tarjeta ExamenDocumento36 pagineTarjeta ExamenlmalúNessuna valutazione finora
- ProgramadorUSB40Documento5 pagineProgramadorUSB40Fercho GaytanNessuna valutazione finora
- Ep450 Uhf-Manual de Servicio DetalladoDocumento72 pagineEp450 Uhf-Manual de Servicio Detalladosil18283% (6)
- Informe 2.4Documento6 pagineInforme 2.4Miguel CuevaNessuna valutazione finora
- Diagrama de TV Chasis 34biDocumento1 paginaDiagrama de TV Chasis 34biRamon Plaza80% (5)
- Marco Teórico OsciladoresDocumento8 pagineMarco Teórico OsciladoresImanol Valdivia LugoNessuna valutazione finora
- Manual Ec3224Documento5 pagineManual Ec3224Alfredo QuinteroNessuna valutazione finora
- Suma PORTB+0AhDocumento3 pagineSuma PORTB+0AhGerman A CMeNessuna valutazione finora
- Pnasonic+sa-Pm11 MinicomponenteDocumento30 paginePnasonic+sa-Pm11 MinicomponenteRonald RomeroNessuna valutazione finora
- Circuito bootloader PIC18F4550Documento1 paginaCircuito bootloader PIC18F4550Joyce AverandaNessuna valutazione finora
- Circuito InversorDocumento1 paginaCircuito InversorWellington Xavier Pazmiño RodríguezNessuna valutazione finora
- 5-band SMD antenna + Arduino shield schematicDocumento1 pagina5-band SMD antenna + Arduino shield schematicdrhammoudaNessuna valutazione finora
- 100 circuitos de shields para arduino (español)Da Everand100 circuitos de shields para arduino (español)Valutazione: 3.5 su 5 stelle3.5/5 (3)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDa EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaNessuna valutazione finora
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDa EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoValutazione: 5 su 5 stelle5/5 (1)
- Localización de Averías en Equipos AlternosDocumento11 pagineLocalización de Averías en Equipos AlternosaxefecNessuna valutazione finora
- Guía para Redacción de Contenidos - BrandmanicDocumento8 pagineGuía para Redacción de Contenidos - BrandmanicaxefecNessuna valutazione finora
- Electricista 2Documento3 pagineElectricista 2axefecNessuna valutazione finora
- TrabajoDocumento2 pagineTrabajoaxefecNessuna valutazione finora
- Normas para Ensayos TC y TPDocumento1 paginaNormas para Ensayos TC y TPaxefecNessuna valutazione finora
- Analisis de Fallas PDFDocumento79 pagineAnalisis de Fallas PDFHinces Cesar0% (1)
- 4 etapas carga bateríaDocumento4 pagine4 etapas carga bateríaaxefecNessuna valutazione finora
- Posible Explicacion de Porque No Se Haran Pruebas Invasivas A InterruptoresDocumento1 paginaPosible Explicacion de Porque No Se Haran Pruebas Invasivas A InterruptoresaxefecNessuna valutazione finora
- Pirámide MaslowDocumento7 paginePirámide MaslowaxefecNessuna valutazione finora
- Ejemplo y Explicacion de Analisis CriticoDocumento3 pagineEjemplo y Explicacion de Analisis Criticoaxefec70% (10)
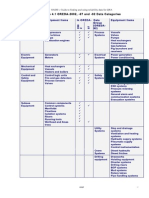
- Categorias Oreda 2002Documento1 paginaCategorias Oreda 2002axefecNessuna valutazione finora
- Consecuencias de Las Fallas EvidentesDocumento1 paginaConsecuencias de Las Fallas EvidentesaxefecNessuna valutazione finora
- AMEF Original 2Documento16 pagineAMEF Original 2axefecNessuna valutazione finora
- Detalles Indicadores Neon Serie XB2BDocumento8 pagineDetalles Indicadores Neon Serie XB2BaxefecNessuna valutazione finora
- Sugerencias Fallas Rele TermicoDocumento1 paginaSugerencias Fallas Rele TermicoaxefecNessuna valutazione finora
- C++ Como Si Estuvieras en PrimeroDocumento87 pagineC++ Como Si Estuvieras en PrimeroAnonymous HPFUTT100% (4)
- RCM ConcrtetoDocumento88 pagineRCM ConcrtetoKarlos Guzman AlarconNessuna valutazione finora
- AMEF OriginalDocumento16 pagineAMEF OriginalaxefecNessuna valutazione finora
- Capitulo I NumeradoDocumento22 pagineCapitulo I NumeradoaxefecNessuna valutazione finora
- Telemecanique Automatizacion y ControlDocumento98 pagineTelemecanique Automatizacion y ControlOmaira SanchezNessuna valutazione finora
- Teoria ArrancadoresDocumento10 pagineTeoria ArrancadoresaxefecNessuna valutazione finora
- Manual de MantenimientoDocumento19 pagineManual de MantenimientoPuacXolajNessuna valutazione finora
- Manual Español Gateway EmersonDocumento26 pagineManual Español Gateway EmersonRodrigo Fritis Lopez0% (1)
- MantenimientoDocumento29 pagineMantenimientoaxefecNessuna valutazione finora
- Blok SetDocumento35 pagineBlok SetaxefecNessuna valutazione finora
- 14 Fmeca4644Documento24 pagine14 Fmeca4644axefecNessuna valutazione finora
- Catálogo Schneider Electric - Protectores Diferenciales en Distribuciones de Baja TensiónDocumento44 pagineCatálogo Schneider Electric - Protectores Diferenciales en Distribuciones de Baja TensióncarlosNessuna valutazione finora
- Circuito Sumador Restador Con 7483Documento2 pagineCircuito Sumador Restador Con 7483axefecNessuna valutazione finora
- Mantenimiento Centrado en Confiabilidad Contabilidad RCMDocumento9 pagineMantenimiento Centrado en Confiabilidad Contabilidad RCMClaudio TorrejonNessuna valutazione finora
- Aprender A Leer Un CableDocumento7 pagineAprender A Leer Un Cableangelbesana9343100% (1)
- General Cable Guía Naranja Noviembre 2021Documento30 pagineGeneral Cable Guía Naranja Noviembre 2021VEMATELNessuna valutazione finora
- Combinacion de CapacitoresDocumento8 pagineCombinacion de CapacitoresAdriSan1994100% (1)
- Planificacion Semana 4Documento1 paginaPlanificacion Semana 4Denisse VélezNessuna valutazione finora
- Acevedo Estrada Alejandro: RMU: 60300 16-06-24 XAXX-010101 002 CFEDocumento2 pagineAcevedo Estrada Alejandro: RMU: 60300 16-06-24 XAXX-010101 002 CFEAlex AcevedoNessuna valutazione finora
- Guia Tecnico Manual Energia Fotovoltaica 130617141135 Phpapp02Documento368 pagineGuia Tecnico Manual Energia Fotovoltaica 130617141135 Phpapp02Felipe Silva100% (2)
- 10 - Examen de La Política Comercial de Chile OMC PDFDocumento393 pagine10 - Examen de La Política Comercial de Chile OMC PDFJotape Con CorbataNessuna valutazione finora
- Informe Adc0808Documento7 pagineInforme Adc0808ANGELA BIBIANA GUZMAN MARTINEZNessuna valutazione finora
- Cambios de Agregación de La MateriaDocumento14 pagineCambios de Agregación de La Materiaclaudia saucedo mirandaNessuna valutazione finora
- Discusión en Balance de EnergiaDocumento2 pagineDiscusión en Balance de EnergiaMáárlóón SááTtNessuna valutazione finora
- 03-Memoria Descriptiva PDFDocumento157 pagine03-Memoria Descriptiva PDFRoberto Reyes RamirezNessuna valutazione finora
- Verificacion Con El Probador de VoltajeDocumento6 pagineVerificacion Con El Probador de VoltajeDennisVarelaNessuna valutazione finora
- Dispositivos Electrónicos IntroduccionDocumento26 pagineDispositivos Electrónicos Introduccioncarlos_montanoaNessuna valutazione finora
- Manual Instalacion Lavavajilla Samsung DMR57LFBDocumento20 pagineManual Instalacion Lavavajilla Samsung DMR57LFBcorf89Nessuna valutazione finora
- Aparicio - Victor - La Caída Del Petróleo - Foro y Entrega.Documento4 pagineAparicio - Victor - La Caída Del Petróleo - Foro y Entrega.victor lopez100% (1)
- Calorimetría y cambio de estadoDocumento56 pagineCalorimetría y cambio de estadoPablo Leo0% (2)
- Ficha de Autoaprendizaje Semana 1 Noviembre Ciencia y Tecnologia Ciclo ViiDocumento5 pagineFicha de Autoaprendizaje Semana 1 Noviembre Ciencia y Tecnologia Ciclo ViiMartin leonardo Lacuta varaNessuna valutazione finora
- AradoscombinadosDocumento31 pagineAradoscombinadosMiguel Santa CruzNessuna valutazione finora
- Nitrato de AmonioDocumento12 pagineNitrato de AmonioAlexander HumpiriNessuna valutazione finora
- LAREPS Febrero 2019-1 PDFDocumento14 pagineLAREPS Febrero 2019-1 PDFAnonymous KV27D7ZF3Nessuna valutazione finora
- Catálogo de partes AutecoDocumento66 pagineCatálogo de partes AutecoEDGAR EDUARDO SALAMANCANessuna valutazione finora
- Pi 02 05 05Documento7 paginePi 02 05 05Miguel D Assisi MenesesNessuna valutazione finora
- Repaso Examen Final 2022Documento5 pagineRepaso Examen Final 2022Anthony TanakaNessuna valutazione finora
- Peines o EncuelladeroDocumento2 paginePeines o EncuelladeroIngeniero Angeles Miranda BustamanteNessuna valutazione finora
- El PetroleoDocumento23 pagineEl PetroleoArmstrong JohaNessuna valutazione finora
- Informe FluvialTABLACHACADocumento21 pagineInforme FluvialTABLACHACADashiell MunarrizNessuna valutazione finora
- 2 Mando Simple de MotoresDocumento17 pagine2 Mando Simple de MotoresBryan Herrera100% (1)
- Tema3 SAT Entorno Economico Nacional InternacionalDocumento110 pagineTema3 SAT Entorno Economico Nacional InternacionalÁngel RNessuna valutazione finora
- Temario Paneles SolaresDocumento6 pagineTemario Paneles SolaresDiego Andrés GómezNessuna valutazione finora