Potrebbero piacerti anche
- Jitter - An Introduction: WhitepaperDocumento7 pagineJitter - An Introduction: WhitepaperJalaj JainNessuna valutazione finora
- Lecture - 07 Stability of Feedback SystemsDocumento31 pagineLecture - 07 Stability of Feedback SystemsakozyNessuna valutazione finora
- Lecture - 11 Robust State Feedback StabilizationDocumento30 pagineLecture - 11 Robust State Feedback StabilizationakozyNessuna valutazione finora
- Objectives: Experiment No. 2 Driving Stepper MotorDocumento6 pagineObjectives: Experiment No. 2 Driving Stepper MotorakozyNessuna valutazione finora
- Nonlinear Control Lecture # 3 Stability of Equilibrium PointsDocumento35 pagineNonlinear Control Lecture # 3 Stability of Equilibrium PointsakozyNessuna valutazione finora
- Lecture - 07 Stability of Feedback SystemsDocumento31 pagineLecture - 07 Stability of Feedback SystemsakozyNessuna valutazione finora
- Lecture - 12 Nonlinear Observers and Output Feedback StabilizationDocumento30 pagineLecture - 12 Nonlinear Observers and Output Feedback StabilizationakozyNessuna valutazione finora
- Lecture - 14 Tracking & RegulationDocumento31 pagineLecture - 14 Tracking & RegulationakozyNessuna valutazione finora
- Dynamic Bayesian Networks - Representation, Inference and LearningDocumento225 pagineDynamic Bayesian Networks - Representation, Inference and Learningcixn62Nessuna valutazione finora
- Controller Selection PDFDocumento45 pagineController Selection PDFakozyNessuna valutazione finora
- Lecture - 13 Output Feedback StabilizationDocumento33 pagineLecture - 13 Output Feedback StabilizationakozyNessuna valutazione finora
- Simple Cooperative Scheduler For ArduinoDocumento9 pagineSimple Cooperative Scheduler For ArduinoakozyNessuna valutazione finora
- Exp1 Switching PrincipleDocumento5 pagineExp1 Switching PrincipleakozyNessuna valutazione finora
- Digital Sensors: Dr. Ashraf SaleemDocumento11 pagineDigital Sensors: Dr. Ashraf SaleemakozyNessuna valutazione finora
- Exp3 Stepper Motor ControlDocumento5 pagineExp3 Stepper Motor ControlakozyNessuna valutazione finora
- Sine Wave GeneratorDocumento12 pagineSine Wave GeneratortranvandoanhNessuna valutazione finora
- DC Motor Speed ControlDocumento5 pagineDC Motor Speed ControlAnita WulansariNessuna valutazione finora
- Intro To InferenceDocumento40 pagineIntro To InferenceakozyNessuna valutazione finora
- Lect 1 IntroDocumento22 pagineLect 1 IntroakozyNessuna valutazione finora
- Tutorial On Monte Carlo Sampling PDFDocumento16 pagineTutorial On Monte Carlo Sampling PDFakozyNessuna valutazione finora
- Controller SelectionDocumento45 pagineController SelectionakozyNessuna valutazione finora
- Advanced RoboticsDocumento381 pagineAdvanced RoboticsakozyNessuna valutazione finora
- Nonlinear Control Lecture # 2 Stability of Equilibrium PointsDocumento36 pagineNonlinear Control Lecture # 2 Stability of Equilibrium PointsFawaz PartoNessuna valutazione finora
- Analog Sensors PDFDocumento110 pagineAnalog Sensors PDFakozyNessuna valutazione finora
- NXP LPC1768 & Keil Quadcopter Project Lab Manual PDFDocumento99 pagineNXP LPC1768 & Keil Quadcopter Project Lab Manual PDFakozyNessuna valutazione finora
- Mechatronics Actuator Selection GuideDocumento5 pagineMechatronics Actuator Selection GuideskylabmNessuna valutazione finora
- Lecture - 01 Introduction & Two-Dimensional SystemsDocumento35 pagineLecture - 01 Introduction & Two-Dimensional SystemsakozyNessuna valutazione finora
- Advanced RoboticsDocumento381 pagineAdvanced RoboticsakozyNessuna valutazione finora
- Microcomputer Implementation of Digital ControlDocumento21 pagineMicrocomputer Implementation of Digital ControlakozyNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 02-Assertion and ReasonDocumento2 pagine02-Assertion and ReasonshriteshNessuna valutazione finora
- Mechanical Engineering FundamentalsDocumento275 pagineMechanical Engineering FundamentalsRonalie DavaNessuna valutazione finora
- Sommerfeld Model Free Electron GasDocumento15 pagineSommerfeld Model Free Electron GasZamzamNessuna valutazione finora
- Ch04 2 SlidesDocumento64 pagineCh04 2 SlidesAmalia AnggreiniNessuna valutazione finora
- Griffiths Problems 01.09Documento2 pagineGriffiths Problems 01.09Madhumika ThammaliNessuna valutazione finora
- Chapter 1 Introduction To Engineering Principles and Units PDFDocumento26 pagineChapter 1 Introduction To Engineering Principles and Units PDFAzam MuddinNessuna valutazione finora
- TDDocumento22 pagineTDPankaj KumarNessuna valutazione finora
- Btech Ee 3 Sem Basic Signals and Systems Kee303 2022Documento2 pagineBtech Ee 3 Sem Basic Signals and Systems Kee303 2022Priyanshu SuryavanshiNessuna valutazione finora
- Sexsecee: XincasDocumento2 pagineSexsecee: Xincasanis bouchemaNessuna valutazione finora
- Chap9 NPT Grand Canonical Ensemble v04Documento12 pagineChap9 NPT Grand Canonical Ensemble v04Paramita HaldarNessuna valutazione finora
- Homework #2: W S Q T T TDocumento3 pagineHomework #2: W S Q T T TwangivanNessuna valutazione finora
- Lesson Plan CHE433 150914 3Documento8 pagineLesson Plan CHE433 150914 3Mohd Hafiz AhmadNessuna valutazione finora
- One Dimensional Heat Conduction EquationDocumento10 pagineOne Dimensional Heat Conduction EquationMonowarul IslamNessuna valutazione finora
- 12 Chapter08 Heat ExchangerDocumento58 pagine12 Chapter08 Heat Exchangerกล้าณรงค์ บริคุตNessuna valutazione finora
- Thermodynamics I: Temperature, Heat and Gas LawsDocumento19 pagineThermodynamics I: Temperature, Heat and Gas LawsAbdelkader Faklani DouNessuna valutazione finora
- Circle Top 500 Question Bank For Jee Main: Mathematics MathongoDocumento28 pagineCircle Top 500 Question Bank For Jee Main: Mathematics MathongoThirunagari RohithNessuna valutazione finora
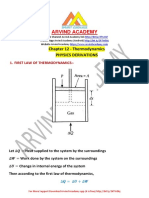
- Arvind Academy: Chapter 12 - Thermodynamics Physics DerivationsDocumento16 pagineArvind Academy: Chapter 12 - Thermodynamics Physics DerivationsShweta ShuklaNessuna valutazione finora
- 63960Documento31 pagine63960amdevaNessuna valutazione finora
- Chaos TheoryDocumento14 pagineChaos TheoryD HernandezNessuna valutazione finora
- Chap 19Documento84 pagineChap 19noscribdyoucantNessuna valutazione finora
- Physical Chemistry Mid Term ExamDocumento4 paginePhysical Chemistry Mid Term ExamMaricar DimasNessuna valutazione finora
- Capitulo 6 Moran ShapiroDocumento59 pagineCapitulo 6 Moran ShapiroGerman GiraudoNessuna valutazione finora
- Newton's Formula and Laplace's Correction: K. R. NiraimathiDocumento8 pagineNewton's Formula and Laplace's Correction: K. R. Niraimathiniraimathi krNessuna valutazione finora
- Chemical Engineering Thermodynamics ReviewDocumento5 pagineChemical Engineering Thermodynamics ReviewGeorge Isaac McQuiles100% (2)
- HEAT TRANSFER PROBLEMS AND SOLUTIONSDocumento5 pagineHEAT TRANSFER PROBLEMS AND SOLUTIONSIntanbyzuri ARNessuna valutazione finora
- Chapter 5: Principle of ConvectionDocumento45 pagineChapter 5: Principle of ConvectionA.N.M. Mominul Islam MukutNessuna valutazione finora
- General Physics 2 - Arellano University - Prepared by Sir - Andro RomanoDocumento31 pagineGeneral Physics 2 - Arellano University - Prepared by Sir - Andro RomanoKesia AlmodalNessuna valutazione finora
- WWW - Easyengineering.: Me8391-Engineering Thermodynamics Detailed Lesson PlanDocumento3 pagineWWW - Easyengineering.: Me8391-Engineering Thermodynamics Detailed Lesson PlanSiva GaneshNessuna valutazione finora
- Parabola Exercise 1 - BDocumento3 pagineParabola Exercise 1 - BAtharva Sheersh PandeyNessuna valutazione finora
- Advanced Fluid MechanicsDocumento213 pagineAdvanced Fluid MechanicsOskar LewitzkyNessuna valutazione finora