Potrebbero piacerti anche
- Daniel y ApocalipsisDocumento255 pagineDaniel y ApocalipsisJosueCalebLopezMontecinos100% (5)
- Cargadores de baterías de mediana y baja capacidad para vehículos eléctricos: Consideraciones preliminares de diseñoDa EverandCargadores de baterías de mediana y baja capacidad para vehículos eléctricos: Consideraciones preliminares de diseñoNessuna valutazione finora
- Servicio de Mensajes Cortos (SMS) el Mercado Telefónico de EspañaDa EverandServicio de Mensajes Cortos (SMS) el Mercado Telefónico de EspañaNessuna valutazione finora
- Ayuda 2. Circuito RLC - Fasor 1Documento47 pagineAyuda 2. Circuito RLC - Fasor 1adelaNessuna valutazione finora
- Prácticas de DistribuciónDocumento20 paginePrácticas de DistribuciónDiany MoralesNessuna valutazione finora
- Formulas de Potencia MecanicaDocumento1 paginaFormulas de Potencia MecanicaJesus Ernesto Jimenez BarralesNessuna valutazione finora
- ElectricasDocumento46 pagineElectricasIr Bryan CordovaNessuna valutazione finora
- Joint VentureDocumento16 pagineJoint VentureMariela Cabrera CedilloNessuna valutazione finora
- Ver A Jesus 10 SecundariaDocumento128 pagineVer A Jesus 10 SecundariaCarlos Eduardo68% (25)
- Formulas Electricas y Mecanicas PDFDocumento5 pagineFormulas Electricas y Mecanicas PDFIván Rodríguez100% (3)
- Unidad 2 Cálculo de Cortocircuito PDFDocumento134 pagineUnidad 2 Cálculo de Cortocircuito PDFAlexandErHenríquezNessuna valutazione finora
- Clase 1 Desarrollo SocioafectivoDocumento24 pagineClase 1 Desarrollo SocioafectivoYiya LokaNessuna valutazione finora
- Calculo de FallasDocumento112 pagineCalculo de FallasRobin Guz Castañeda SaavedraNessuna valutazione finora
- Itb - Rav2ctr2 - FinalDocumento48 pagineItb - Rav2ctr2 - Finalfernando mora de la vegaNessuna valutazione finora
- Guía de La Aparamenta de Media TensiónDocumento28 pagineGuía de La Aparamenta de Media TensiónRodrigoNessuna valutazione finora
- Información Técnica. Schneider ElectricDocumento20 pagineInformación Técnica. Schneider Electricmarevalom100% (2)
- 1b.interruptores y SeccionadoresDocumento35 pagine1b.interruptores y SeccionadoresJuank_CAD100% (1)
- Factor de Potencia y ArmonicosDocumento11 pagineFactor de Potencia y ArmonicoszirckoNessuna valutazione finora
- Homo FaberDocumento3 pagineHomo FaberJessica Ivania Sandino UrbinaNessuna valutazione finora
- Sílabo Propedeutica Universitaria 2017-I OMAR ANTESANODocumento5 pagineSílabo Propedeutica Universitaria 2017-I OMAR ANTESANOOmar Antesano ChávezNessuna valutazione finora
- KirchoffDocumento10 pagineKirchoffStefany GradosNessuna valutazione finora
- Instalaciones Electricas Alta TensionDocumento12 pagineInstalaciones Electricas Alta TensionDavid Garcia Criado100% (1)
- Un I Logica de RelevadoresDocumento40 pagineUn I Logica de RelevadoresJesus Manuel Tarin Fontes100% (1)
- Puesta A TierraDocumento3 paginePuesta A TierraLuis EnriqueNessuna valutazione finora
- 1.el Concepto de Amor A Través de La Historia PDFDocumento2 pagine1.el Concepto de Amor A Través de La Historia PDFPs Dipson Paz IrrazábalNessuna valutazione finora
- 5 Procedimiento de Elección de Un MagnetotérmicoDocumento2 pagine5 Procedimiento de Elección de Un MagnetotérmicoJuan Jose CuevasNessuna valutazione finora
- Clase 5 - Protección Contra Sobrcargas y CortocircutosDocumento28 pagineClase 5 - Protección Contra Sobrcargas y CortocircutosJoel EncaladaNessuna valutazione finora
- Requisito Generales para Se 138kvDocumento93 pagineRequisito Generales para Se 138kvRony RodriguezNessuna valutazione finora
- Portero Electrico InteligenteDocumento32 paginePortero Electrico InteligenteSociocultural ProjectNessuna valutazione finora
- Planos ElectricosDocumento188 paginePlanos ElectricosMiguel TorresNessuna valutazione finora
- Selección de Motores Eléctricos - DesbloqueadoDocumento7 pagineSelección de Motores Eléctricos - DesbloqueadoLuis GodoyNessuna valutazione finora
- Accesorios Comerciales para Tuberia IMC y EMT Eaton Crouse HindsDocumento6 pagineAccesorios Comerciales para Tuberia IMC y EMT Eaton Crouse HindsaideeNessuna valutazione finora
- Introducción - Factorización y Ecuaciones de Primer GradoDocumento3 pagineIntroducción - Factorización y Ecuaciones de Primer GradolenioxxNessuna valutazione finora
- Diseño de Una ICT Francisco ParedesDocumento107 pagineDiseño de Una ICT Francisco ParedesFran Hendry O'sullivan100% (1)
- Luces AudioritmicasDocumento12 pagineLuces AudioritmicasMidwar Miguel ChuraNessuna valutazione finora
- Conceptos LUMINOTECNICODocumento3 pagineConceptos LUMINOTECNICOjcmagraNessuna valutazione finora
- Distancia Partrenzado en CamarasDocumento20 pagineDistancia Partrenzado en CamarasMarco Antonio Estremadoyro ManyariNessuna valutazione finora
- ExamenDocumento3 pagineExamenJavier SepulvedaNessuna valutazione finora
- Calculo de Lineas AereasDocumento37 pagineCalculo de Lineas AereasRuth Vilma Quispe SalcedoNessuna valutazione finora
- Logica de Control de BombasDocumento2 pagineLogica de Control de BombasCarlos Enrique Antaurco AtaucuriNessuna valutazione finora
- Guarda MotorDocumento9 pagineGuarda MotorDiego Velasco100% (3)
- WEG MPW Guardamotores 50030559 Catalogo EspanolDocumento40 pagineWEG MPW Guardamotores 50030559 Catalogo EspanolHernán Carrión Salinas100% (1)
- Presentacion ArtecheDocumento140 paginePresentacion ArtecheFabián Medina0% (1)
- Reglamento de BT UTE PDFDocumento449 pagineReglamento de BT UTE PDFAna LauNessuna valutazione finora
- Interruptores Schneider Electric PDFDocumento68 pagineInterruptores Schneider Electric PDFjhonnyNessuna valutazione finora
- TransformadoresDocumento5 pagineTransformadoresjhonNessuna valutazione finora
- Tableros de Subdistribución y Alumbrado 480 V ABBDocumento8 pagineTableros de Subdistribución y Alumbrado 480 V ABBJose GutierrezNessuna valutazione finora
- Prácticas AiDocumento27 paginePrácticas AiEnrique MartinezNessuna valutazione finora
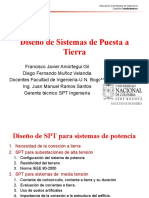
- Diseño de SPT-2Documento41 pagineDiseño de SPT-2Sid OoNessuna valutazione finora
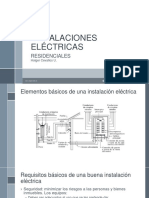
- Instalación ResidencialDocumento110 pagineInstalación ResidencialEdison AlvaradoNessuna valutazione finora
- Figuras Norma Suinac - Version FinalDocumento30 pagineFiguras Norma Suinac - Version FinalJavier HerreraNessuna valutazione finora
- UT 1 Cap1 Conceptos Basicos PDFDocumento35 pagineUT 1 Cap1 Conceptos Basicos PDFViktor StarkNessuna valutazione finora
- Corriente Alterna Sinusoidal Monofásica (Iv) 1Documento37 pagineCorriente Alterna Sinusoidal Monofásica (Iv) 1JUGODECIRUELANessuna valutazione finora
- Fusibles Tipo K T H DualDocumento7 pagineFusibles Tipo K T H DualMiguel CampoverdeNessuna valutazione finora
- Guia EtapDocumento14 pagineGuia EtapCristhianNessuna valutazione finora
- Control de Velocidad de Maquinas de Corriente ContinuaDocumento7 pagineControl de Velocidad de Maquinas de Corriente ContinuaMichel Martinez FloresNessuna valutazione finora
- Ingenieria Electricidad y Electronica Industrial Malla 2021Documento2 pagineIngenieria Electricidad y Electronica Industrial Malla 2021CarlosAndresMirandaHernandesNessuna valutazione finora
- BAW-Seccionadores GiroDocumento8 pagineBAW-Seccionadores GiroMauricio GuanellaNessuna valutazione finora
- 40120-Evid086-Rectificador de Onda Cuadrada-Juan MartinezDocumento22 pagine40120-Evid086-Rectificador de Onda Cuadrada-Juan Martinezjuanse_lestat0% (1)
- Arranque en Motores de Corriente AlternaDocumento19 pagineArranque en Motores de Corriente Alternapraxis00Nessuna valutazione finora
- (PT-071) Protecciones Electricas en MTDocumento197 pagine(PT-071) Protecciones Electricas en MTlaurasanchez_7374313Nessuna valutazione finora
- Interruptor Activado Por SonidoDocumento6 pagineInterruptor Activado Por SonidoBryan Benz BronsonNessuna valutazione finora
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareDa EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareNessuna valutazione finora
- Motores Trifásicos de Inducción I-3c 2016Documento31 pagineMotores Trifásicos de Inducción I-3c 2016Jesse FernándezNessuna valutazione finora
- Maquina Universal PDFDocumento9 pagineMaquina Universal PDFLuis MuñozNessuna valutazione finora
- Estabilidad de Sistemas ElectricosDocumento15 pagineEstabilidad de Sistemas ElectricosJohn RangelNessuna valutazione finora
- Me II 204 Operacion Dinamica de Maquinas Electricas Setiembre 2018Documento35 pagineMe II 204 Operacion Dinamica de Maquinas Electricas Setiembre 2018Fran RodriguezNessuna valutazione finora
- Itc BT 31Documento10 pagineItc BT 31David Garcia CriadoNessuna valutazione finora
- Ni 76-50-01 Agosto 2003 4c2aa Ed Cajas Generales de ProteccionDocumento25 pagineNi 76-50-01 Agosto 2003 4c2aa Ed Cajas Generales de ProteccionDavid Garcia CriadoNessuna valutazione finora
- Catalogo de Iluminacion Philips LED Julio 2014Documento80 pagineCatalogo de Iluminacion Philips LED Julio 2014David Garcia CriadoNessuna valutazione finora
- Las Metas CambianDocumento11 pagineLas Metas CambianDesiree VillalbaNessuna valutazione finora
- Guia de Aprendizaje AA2Documento12 pagineGuia de Aprendizaje AA2yaleth alexandra garcia25% (4)
- Elige Los ConectoresDocumento2 pagineElige Los ConectoresgenoNessuna valutazione finora
- Museo Judío de BerlínDocumento2 pagineMuseo Judío de BerlínCinthya Lizeth Juculaca IncacutipaNessuna valutazione finora
- Inseguridad VialDocumento6 pagineInseguridad Vialfreddesp200450% (2)
- Res 2010016150173508000086935Documento10 pagineRes 2010016150173508000086935Diego ApazaNessuna valutazione finora
- Resumen Parte 4Documento6 pagineResumen Parte 4Aracely SanchezNessuna valutazione finora
- Consecuencias de La ModernidadDocumento19 pagineConsecuencias de La ModernidadJocelyn IvetteNessuna valutazione finora
- Zizek - Batman y La Dictadura Del ProletariadoDocumento9 pagineZizek - Batman y La Dictadura Del ProletariadoAk'turo ErewonNessuna valutazione finora
- Guia La Casita Azul WebDocumento7 pagineGuia La Casita Azul WebBrenda Sanchez50% (2)
- Curso de Paramedico - CIACSADocumento1 paginaCurso de Paramedico - CIACSAWalter Eichner100% (1)
- LEO J. ELDERS, Las Propiedades Del Ser y El HombreDocumento9 pagineLEO J. ELDERS, Las Propiedades Del Ser y El HombreleobmesquitaNessuna valutazione finora
- 2.3. Etapas de InvestigacionDocumento11 pagine2.3. Etapas de InvestigacionTiare Readi AranedaNessuna valutazione finora
- Ejercicios de Inducción, Sumatorias y Matrices ResueltosDocumento4 pagineEjercicios de Inducción, Sumatorias y Matrices ResueltosIgnacio MendezNessuna valutazione finora
- Resumen ChipinDocumento1 paginaResumen ChipinXavier Quimbita33% (3)
- La Dimensión Cognitiva Importancia Y Trascendencia en La Educación Básica, Secundaria Y Media Técnica en Las Ciudadelas EducativasDocumento6 pagineLa Dimensión Cognitiva Importancia Y Trascendencia en La Educación Básica, Secundaria Y Media Técnica en Las Ciudadelas EducativasMartinchito RuizNessuna valutazione finora
- Elementos y Lineamientos para Elaborar Un Protocolo de InvestigaciónDocumento16 pagineElementos y Lineamientos para Elaborar Un Protocolo de InvestigaciónMtz Juan100% (3)
- El Análisis Conductista Del Pensamiento HumanoDocumento3 pagineEl Análisis Conductista Del Pensamiento HumanoCatarina GomezNessuna valutazione finora
- Termodinámica Sistemas BiológicosDocumento29 pagineTermodinámica Sistemas Biológicosapi-26763370100% (2)
- Utopía y Distopía en La Narrativa VenezolanaDocumento13 pagineUtopía y Distopía en La Narrativa VenezolanaRafael E Figueredo ONessuna valutazione finora
- De Epistemología PsicoanalíticaDocumento6 pagineDe Epistemología PsicoanalíticaJanet AlfaroNessuna valutazione finora
- T Utc 1406Documento404 pagineT Utc 1406diggerexeNessuna valutazione finora
- Maltrato InfantilDocumento176 pagineMaltrato InfantilNepente DionisioNessuna valutazione finora