Potrebbero piacerti anche
- The Cassini Spacecraft Just Crashed Into Saturn: Speaking of ScienceDocumento5 pagineThe Cassini Spacecraft Just Crashed Into Saturn: Speaking of Scienceneotn_neoNessuna valutazione finora
- PDF/ADocumento5 paginePDF/Aneotn_neoNessuna valutazione finora
- Politics - Donald Trump's Son in Law, Jared Kushner, Tests Legal Path To White House JobDocumento1 paginaPolitics - Donald Trump's Son in Law, Jared Kushner, Tests Legal Path To White House Jobneotn_neoNessuna valutazione finora
- Test PDFDocumento1 paginaTest PDFneotn_neoNessuna valutazione finora
- ThingWorx OnFarm Case StudyDocumento4 pagineThingWorx OnFarm Case Studyneotn_neoNessuna valutazione finora
- Introduction To Ipopt: A Tutorial For Downloading, Installing, and Using IpoptDocumento93 pagineIntroduction To Ipopt: A Tutorial For Downloading, Installing, and Using Ipoptneotn_neoNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Chapter 4 Signal Flow GraphDocumento34 pagineChapter 4 Signal Flow GraphAbhishek PattanaikNessuna valutazione finora
- Ads Unit 3Documento74 pagineAds Unit 3delphin jeraldNessuna valutazione finora
- The Dual in LPDocumento17 pagineThe Dual in LPShreeyesh MenonNessuna valutazione finora
- Detailed Lesson PlanDocumento8 pagineDetailed Lesson PlanAmlorepava Mary50% (2)
- DjikstraDocumento5 pagineDjikstramanoj1390Nessuna valutazione finora
- 02 ES 14 Classifications of First-Order DEs - Part 1Documento10 pagine02 ES 14 Classifications of First-Order DEs - Part 1Peter Kent ManliguisNessuna valutazione finora
- Five Days Lesson Plan On ParabolaDocumento12 pagineFive Days Lesson Plan On ParabolaMarcia Patterson100% (1)
- DFMFullCoverage FunctionsDocumento12 pagineDFMFullCoverage FunctionsIsheanopa HoveNessuna valutazione finora
- Lab Manual Algorithms Laboratory: For MCA 4 Semester of VTUDocumento32 pagineLab Manual Algorithms Laboratory: For MCA 4 Semester of VTUAfreen TajNessuna valutazione finora
- Pravila Derivacije I IntegracijeDocumento2 paginePravila Derivacije I IntegracijeSasa UscumlicNessuna valutazione finora
- Multivariable Calculus: 1. The DerivativeDocumento17 pagineMultivariable Calculus: 1. The Derivativekemo_750252831Nessuna valutazione finora
- Hw2ans PDFDocumento3 pagineHw2ans PDFAmina TabassumNessuna valutazione finora
- 116 hw1Documento5 pagine116 hw1thermopolis3012Nessuna valutazione finora
- Systems of Linear EquationsDocumento19 pagineSystems of Linear EquationsAZAIIINessuna valutazione finora
- District MathmeticsDocumento46 pagineDistrict MathmeticsAnkon Gopal BanikNessuna valutazione finora
- 20-1 U1L1 - Investigating Quadratic Functions in Vertex FormDocumento6 pagine20-1 U1L1 - Investigating Quadratic Functions in Vertex FormPaige MayellNessuna valutazione finora
- Unit 2 AP Classroom PDFDocumento50 pagineUnit 2 AP Classroom PDFSara AbdelazizNessuna valutazione finora
- Roark's Formula 0 30Documento1 paginaRoark's Formula 0 30Jay CeeNessuna valutazione finora
- CBSE Class XII Mathematics - Inverse Trigonometric Functions Assignment 2 PDFDocumento4 pagineCBSE Class XII Mathematics - Inverse Trigonometric Functions Assignment 2 PDFPooja KathuriaNessuna valutazione finora
- Linear Reccurence RelationsDocumento25 pagineLinear Reccurence RelationsSamarpita Sarkar100% (1)
- CH-6, MATH-5 - LECTURE - NOTE - Summer - 20-21Documento16 pagineCH-6, MATH-5 - LECTURE - NOTE - Summer - 20-21আসিফ রেজাNessuna valutazione finora
- Complex VariablesDocumento2 pagineComplex VariablesAli KhanNessuna valutazione finora
- Engineering Mathematics-I MCQ Question BankDocumento94 pagineEngineering Mathematics-I MCQ Question BankKIRUTHIKA V UCS20443Nessuna valutazione finora
- Approximating Functions: Chapter TenDocumento32 pagineApproximating Functions: Chapter TenArjunNessuna valutazione finora
- BooleDocumento1 paginaBoolechegarrNessuna valutazione finora
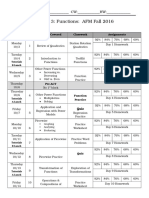
- Unit 3 Cover Sheet Homework Packet Fall 2016Documento14 pagineUnit 3 Cover Sheet Homework Packet Fall 2016api-328105463Nessuna valutazione finora
- What Is A FunctionDocumento443 pagineWhat Is A Functionjimuel imbuidoNessuna valutazione finora
- CO3 - Math 146Documento85 pagineCO3 - Math 146Keith LizanNessuna valutazione finora
- Class XII Assignment - MatricesDocumento13 pagineClass XII Assignment - MatricesCRPF School100% (1)
- Weekly Home Learning Plan Grade 10 - Mathematics Week 1 Quarter 2 January 15, 2021Documento4 pagineWeekly Home Learning Plan Grade 10 - Mathematics Week 1 Quarter 2 January 15, 2021rotshen casilacNessuna valutazione finora