Potrebbero piacerti anche
- Fig. 2 (A) Self Excited Induction GeneratorDocumento7 pagineFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagaleNessuna valutazione finora
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDocumento2 pagineA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719Nessuna valutazione finora
- Matrix Converter - ReportDocumento31 pagineMatrix Converter - ReportAmal P Nirmal100% (2)
- Zero-Voltage Switching For Three-Level Capacitor Clamping InverterDocumento11 pagineZero-Voltage Switching For Three-Level Capacitor Clamping InverterTiền Hoàng VănNessuna valutazione finora
- Voltage Source Inverter Drive: Ece 504 - Experiment 2Documento17 pagineVoltage Source Inverter Drive: Ece 504 - Experiment 2Olimpiu StoicutaNessuna valutazione finora
- Tugas 6 Kendali Mesin Listrik Industri - Aulia Silfani - 20130072Documento8 pagineTugas 6 Kendali Mesin Listrik Industri - Aulia Silfani - 20130072Aulia SilfaniNessuna valutazione finora
- Optimal PDFDocumento6 pagineOptimal PDFjalilemadiNessuna valutazione finora
- Hybrid Cascaded Multilevel Converter for Battery Energy Storage SystemsDocumento5 pagineHybrid Cascaded Multilevel Converter for Battery Energy Storage SystemsMadhumitha SelvarajNessuna valutazione finora
- STATCOMDocumento17 pagineSTATCOMAbdel-Rahman Saifedin ArandasNessuna valutazione finora
- Single Phase To Three Phase ConverterDocumento5 pagineSingle Phase To Three Phase ConverterGabriel MejiaNessuna valutazione finora
- Modeling and Control of an Advanced Static Var Compensator Using Three-Level InverterDocumento6 pagineModeling and Control of an Advanced Static Var Compensator Using Three-Level InverterRaviraj KumbharNessuna valutazione finora
- Pulse: Modulated InvertersDocumento11 paginePulse: Modulated InvertersBrahmananda Reddy TeegalaNessuna valutazione finora
- 20 KW Water-Cooled Prototype of A Buck-Boost Bidirectional DC-DC Converter Topology For Electrical Vehicle Motor DrivesDocumento6 pagine20 KW Water-Cooled Prototype of A Buck-Boost Bidirectional DC-DC Converter Topology For Electrical Vehicle Motor DrivesEnes UğurNessuna valutazione finora
- Single Phase Induction Motor Literature SurveyDocumento6 pagineSingle Phase Induction Motor Literature SurveyBustanul ArifienNessuna valutazione finora
- 06533563Documento8 pagine06533563MadhavanIceNessuna valutazione finora
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDocumento8 pagineZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweNessuna valutazione finora
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocumento5 pagineAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNessuna valutazione finora
- A Modified Single-Phase Quasi-Z-Source Ac-Ac ConverterDocumento7 pagineA Modified Single-Phase Quasi-Z-Source Ac-Ac ConverterMaruthi JacsNessuna valutazione finora
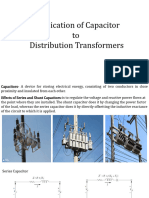
- 8.application of CapacitorsDocumento19 pagine8.application of CapacitorsImjusttryingtohelpNessuna valutazione finora
- Modelling and Control of a Flying-Capacitor InverterDocumento9 pagineModelling and Control of a Flying-Capacitor InverterMariem KammounNessuna valutazione finora
- Harmonic Mitigation in Ac-Dc Converter For Vector Controlled Induction MotorDocumento12 pagineHarmonic Mitigation in Ac-Dc Converter For Vector Controlled Induction MotorAshish SinghNessuna valutazione finora
- Control of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceDocumento8 pagineControl of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceAnand KumarNessuna valutazione finora
- Tugas BiohidrogenDocumento6 pagineTugas BiohidrogenlestariNessuna valutazione finora
- Iceets 2013 6533563Documento9 pagineIceets 2013 6533563Steni MoaiNessuna valutazione finora
- RSCCDocumento8 pagineRSCCWinnie SajayNessuna valutazione finora
- A Maximum Torque Control: A Controlled Capacitor For A Single-Phase Induction MotorDocumento8 pagineA Maximum Torque Control: A Controlled Capacitor For A Single-Phase Induction MotorPhạm Ngọc QuânNessuna valutazione finora
- ProjectDocumento30 pagineProjectmitesh goyal100% (1)
- Reactive PowerDocumento17 pagineReactive PowerPrateek David0% (1)
- Chap 19Documento55 pagineChap 19Arnab DeNessuna valutazione finora
- Voltage Balancing Control For A Three-Level Diode-Clamped Converter in A Medium-Voltage Transformerless Hybrid Active FilterDocumento9 pagineVoltage Balancing Control For A Three-Level Diode-Clamped Converter in A Medium-Voltage Transformerless Hybrid Active FilterMiguel PanduroNessuna valutazione finora
- Impact of Utility Switched Capacitor On Customer Systems - Part 2 - Adjustable Speed Drive ConcernsDocumento6 pagineImpact of Utility Switched Capacitor On Customer Systems - Part 2 - Adjustable Speed Drive ConcernsMadhusudhan SrinivasanNessuna valutazione finora
- AC Lines SVS CompensationDocumento8 pagineAC Lines SVS CompensationSagar ThakerNessuna valutazione finora
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocumento11 pagineDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNessuna valutazione finora
- Zigzag Connected Autotransformer-Based 24-Pulse AC-DC ConverterDocumento12 pagineZigzag Connected Autotransformer-Based 24-Pulse AC-DC ConverterMiguel OchoaNessuna valutazione finora
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocumento5 pagineBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNessuna valutazione finora
- Fast Charger 2Documento10 pagineFast Charger 2gcarliNessuna valutazione finora
- A New Single-Phase Single-Stage Three-LevelDocumento12 pagineA New Single-Phase Single-Stage Three-LevelGururaj BandaNessuna valutazione finora
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocumento18 pagineCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNessuna valutazione finora
- DC-DC Converter: Four Switches V V 2, Capacitive Turn-Off Snubbing, ZV Turn-OnDocumento10 pagineDC-DC Converter: Four Switches V V 2, Capacitive Turn-Off Snubbing, ZV Turn-OnRomitan AlexandraNessuna valutazione finora
- Vsi Csi With Various LoadsDocumento56 pagineVsi Csi With Various LoadsDeependra RastogiNessuna valutazione finora
- Important Questions - APS - IDocumento3 pagineImportant Questions - APS - IAakash MehtaNessuna valutazione finora
- Power Factor ImprovementDocumento8 paginePower Factor ImprovementmshahidshaukatNessuna valutazione finora
- An Electromagnetic Transient Simulation Model ForDocumento4 pagineAn Electromagnetic Transient Simulation Model ForMohit Kumar ChowdaryNessuna valutazione finora
- Design and Implementation of A Switching Converters Based Power System For Regions Victim To Frequent Power OutageDocumento6 pagineDesign and Implementation of A Switching Converters Based Power System For Regions Victim To Frequent Power OutageAlexis CorzoNessuna valutazione finora
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocumento38 pagineVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyNessuna valutazione finora
- Modeling Transmission and Distribution Systems Using PSS AdeptDocumento8 pagineModeling Transmission and Distribution Systems Using PSS Adeptlinkin_slayerNessuna valutazione finora
- ThesisDocumento75 pagineThesishodeegits9526Nessuna valutazione finora
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocumento56 pagineA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNessuna valutazione finora
- Design and Implementation of Magnetron Power Supply and EmulatorDocumento10 pagineDesign and Implementation of Magnetron Power Supply and Emulatorinty vacaNessuna valutazione finora
- Angle Controlled Current Regulated Rectifiers For AC/AC ConvertersDocumento7 pagineAngle Controlled Current Regulated Rectifiers For AC/AC ConvertersKanomba JavaNessuna valutazione finora
- v42 63Documento5 paginev42 63Bala KumarNessuna valutazione finora
- A Brushless DC Motor Drive-763Documento5 pagineA Brushless DC Motor Drive-763Harshal VaidyaNessuna valutazione finora
- A Brushless DC Motor Drive-763 PDFDocumento5 pagineA Brushless DC Motor Drive-763 PDFHarshal VaidyaNessuna valutazione finora
- Surviving Voltage TransientsDocumento3 pagineSurviving Voltage TransientsEeindustrialNessuna valutazione finora
- Singh 2006Documento10 pagineSingh 2006martin.teruelNessuna valutazione finora
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDa EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetValutazione: 2 su 5 stelle2/5 (1)
- tcrt5000 Reflective SensorDocumento12 paginetcrt5000 Reflective SensorRavindranath NaikNessuna valutazione finora
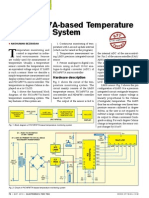
- TempDocumento3 pagineTempParth Joshi100% (1)
- 1 FourierDocumento27 pagine1 FourierMhzn RazuNessuna valutazione finora
- Motor ControlDocumento11 pagineMotor ControlRavindranath NaikNessuna valutazione finora
- 01280733Documento2 pagine01280733Ravindranath NaikNessuna valutazione finora
- Design of A Microcontroller-BasedDocumento43 pagineDesign of A Microcontroller-BasedmuralimallikaNessuna valutazione finora
- Chapter 4Documento41 pagineChapter 4Anil ParmarNessuna valutazione finora
- Ijett V4i4p253Documento5 pagineIjett V4i4p253Ravindranath NaikNessuna valutazione finora
- 14A Non-Isolated Flyback ReportDocumento77 pagine14A Non-Isolated Flyback ReportRavindranath NaikNessuna valutazione finora
- 5230 - DSP Controller For Power Electronic ConverterDocumento93 pagine5230 - DSP Controller For Power Electronic ConverterPaul Mohan100% (1)
- DC Motor Speed ControlDocumento6 pagineDC Motor Speed ControlSagar WabaleNessuna valutazione finora
- PDFDocumento6 paginePDFRavindranath NaikNessuna valutazione finora
- A Micocotroller Based Digital Thermometer With Timer DigithermoDocumento10 pagineA Micocotroller Based Digital Thermometer With Timer DigithermoKarthik MohanNessuna valutazione finora
- PDFDocumento11 paginePDFRavindranath NaikNessuna valutazione finora
- #Fit, F$: Buck-Boost PWM Converters Having Two Independently Controlled SwitchesDocumento6 pagine#Fit, F$: Buck-Boost PWM Converters Having Two Independently Controlled SwitchesVinod SrinivasanNessuna valutazione finora
- Model and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesDocumento5 pagineModel and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesRavindranath NaikNessuna valutazione finora
- h-PARAMETER BJT MODEL: Two Port NetworksDocumento6 pagineh-PARAMETER BJT MODEL: Two Port NetworksArmor BatsNessuna valutazione finora
- Model and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesDocumento5 pagineModel and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesRavindranath NaikNessuna valutazione finora
- STEP 7 - Programming With STEP 7Documento650 pagineSTEP 7 - Programming With STEP 7raveekornov100% (8)
- Cost Optimization of Wind PV Diesel SystemsDocumento5 pagineCost Optimization of Wind PV Diesel SystemsSatish NairNessuna valutazione finora
- Low Voltage Electronics Portable Wireless Applications: An Industrial Perspective Mike Golio Roc Kwell-Col Ns 400 Collins NE Cedar Rapids, IA 52498Documento4 pagineLow Voltage Electronics Portable Wireless Applications: An Industrial Perspective Mike Golio Roc Kwell-Col Ns 400 Collins NE Cedar Rapids, IA 52498Ravindranath NaikNessuna valutazione finora