Potrebbero piacerti anche
- Sobrepoblacion en MexicoDocumento21 pagineSobrepoblacion en MexicoAngel David Ponce OropezaNessuna valutazione finora
- 4 AlmacenamientoDocumento8 pagine4 AlmacenamientoAngel David Ponce OropezaNessuna valutazione finora
- Mercado Mundial de Gas y PetróleoDocumento3 pagineMercado Mundial de Gas y PetróleoAngel David Ponce OropezaNessuna valutazione finora
- Unidad 2 Comportamiento de FasesDocumento33 pagineUnidad 2 Comportamiento de FasesAngel David Ponce Oropeza67% (6)
- Postres FacilesDocumento35 paginePostres FacilesAngel David Ponce OropezaNessuna valutazione finora
- CLasificacion Del Sistema Lazo AbiertoDocumento3 pagineCLasificacion Del Sistema Lazo AbiertoAngel David Ponce OropezaNessuna valutazione finora
- Bombas ReciprocantesDocumento17 pagineBombas ReciprocantesAngel David Ponce OropezaNessuna valutazione finora
- Qué Es Un Modelo MecanísticoDocumento2 pagineQué Es Un Modelo MecanísticoAngel David Ponce OropezaNessuna valutazione finora
- Que Hace Un HidrogeologoDocumento17 pagineQue Hace Un HidrogeologoAngel David Ponce OropezaNessuna valutazione finora
- Patrones de Flujo en Tuberias VerticalDocumento6 paginePatrones de Flujo en Tuberias VerticalAngel David Ponce OropezaNessuna valutazione finora
- Bombas PEMEXDocumento233 pagineBombas PEMEXcaballo-100% (6)
- Unidad IV Compuestos No Carbonisados Del PetroleoDocumento36 pagineUnidad IV Compuestos No Carbonisados Del PetroleoAngel David Ponce Oropeza100% (1)
- 1.1 Equipos Termodinamicos en La Industria PetroleraDocumento7 pagine1.1 Equipos Termodinamicos en La Industria PetroleraAngel David Ponce Oropeza100% (2)
- Prospeccion GeoelectricaDocumento30 pagineProspeccion GeoelectricaCésar Luis Apaza Maquera100% (3)
- Parcial 2 - Física Mecánica 2021-2 - Revisión Del IntentoDocumento4 pagineParcial 2 - Física Mecánica 2021-2 - Revisión Del IntentoMARIA ANDREA HERNANDEZ ARIASNessuna valutazione finora
- Mapa Curricular Plan 2020-ECADocumento1 paginaMapa Curricular Plan 2020-ECAjorgeNessuna valutazione finora
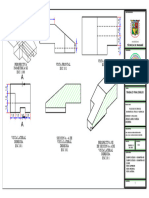
- Jesus Jahel Varela Moreira - Trabajo Final de DibujoDocumento1 paginaJesus Jahel Varela Moreira - Trabajo Final de Dibujomayra moreirazNessuna valutazione finora
- Anexo 3. Ejercicios Fase 6 Evaluación Final POADocumento2 pagineAnexo 3. Ejercicios Fase 6 Evaluación Final POAJORGE PACHECONessuna valutazione finora
- Guia Fisica 8 Periodo IIIDocumento9 pagineGuia Fisica 8 Periodo IIIAndrea GutierrezNessuna valutazione finora
- Sesion #2 Discriminante en Ecuaciones de Segundo Grado PDFDocumento2 pagineSesion #2 Discriminante en Ecuaciones de Segundo Grado PDFAndres CsLzNessuna valutazione finora
- Modelos de Superficies Cuadricas, Rectas y Planos en 3DDocumento1 paginaModelos de Superficies Cuadricas, Rectas y Planos en 3D230156Nessuna valutazione finora
- 4.-Sistemas de CifradoDocumento8 pagine4.-Sistemas de CifradojohnNessuna valutazione finora
- Guia1 - Fundamentos-Windows Form (C#)Documento13 pagineGuia1 - Fundamentos-Windows Form (C#)Louis Alfred Alarcón MarinNessuna valutazione finora
- Eliminacion Gauss Jordan-2Documento1 paginaEliminacion Gauss Jordan-2electronico49Nessuna valutazione finora
- Capitulo 12 CastellanDocumento8 pagineCapitulo 12 CastellanmariaalejandrabaiaNessuna valutazione finora
- Calculo Diferencial Cap10Documento2 pagineCalculo Diferencial Cap10royer999100% (2)
- VectoresDocumento18 pagineVectoresJorge SegoviaNessuna valutazione finora
- Análisis Dinámico de Mecanismos - Plan de TemasDocumento2 pagineAnálisis Dinámico de Mecanismos - Plan de TemasaresreiderNessuna valutazione finora
- Analisis Musical Del Solo de Jump Start de Greg Howe para Guitarra Electrica PDFDocumento72 pagineAnalisis Musical Del Solo de Jump Start de Greg Howe para Guitarra Electrica PDFJorge Castillo100% (1)
- Ficha 1 DivisibilidadDocumento6 pagineFicha 1 DivisibilidadelenitamateNessuna valutazione finora
- Sem 3 - Sesión 7 - Transformación de Funciones (Traslación Vertical y Horizontal)Documento17 pagineSem 3 - Sesión 7 - Transformación de Funciones (Traslación Vertical y Horizontal)luz leon maldonadoNessuna valutazione finora
- Ejemplo de Procesamiento de Imagenes PDFDocumento5 pagineEjemplo de Procesamiento de Imagenes PDFcrazy6661158Nessuna valutazione finora
- Geometría AnalíticaDocumento8 pagineGeometría AnalíticaCRISTIAN ENRIQUE CASTILLO BARRIENTOSNessuna valutazione finora
- Guia Trabajos Practicos de FilosofiaDocumento39 pagineGuia Trabajos Practicos de FilosofiaialeNessuna valutazione finora
- Calculo IntDocumento27 pagineCalculo IntJose Manuel Arenas CruzNessuna valutazione finora
- Proyecto de InnovacionDocumento17 pagineProyecto de InnovacionOberluisNessuna valutazione finora
- Lab 6 PDSDocumento6 pagineLab 6 PDSmis_apuntesNessuna valutazione finora
- Conf. 09 Circuitos Trifásicos Balanceados. PotenciaDocumento16 pagineConf. 09 Circuitos Trifásicos Balanceados. PotenciaCarlos RodriguezNessuna valutazione finora
- Preguntas Meca 2Documento4 paginePreguntas Meca 2Escobar JesusNessuna valutazione finora
- La Historia de La Estadística Está Resumida en Tres Grandes Etapas o FasesDocumento2 pagineLa Historia de La Estadística Está Resumida en Tres Grandes Etapas o Fasesjessinab21Nessuna valutazione finora
- Resumen Costos VERSION 1Documento28 pagineResumen Costos VERSION 1Marcela FloresNessuna valutazione finora
- Tarea 3 Calculo Diferencial - Estudiante 1Documento8 pagineTarea 3 Calculo Diferencial - Estudiante 1ELVIA MELONessuna valutazione finora
- Competencias MatemáticasDocumento13 pagineCompetencias MatemáticasEsmeralda Chirivi TamayoNessuna valutazione finora
- 08 Estimacion de La Varianza PoblacionalDocumento17 pagine08 Estimacion de La Varianza PoblacionalDelsyNessuna valutazione finora