Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Stavanger Tourist SpotDocumento96 pagineStavanger Tourist Spotregupathi6413Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Allen Bradley Power Monitor 3000 Manual PDFDocumento356 pagineAllen Bradley Power Monitor 3000 Manual PDFAndrewcaesar100% (1)
- YOKOGAWADocumento16 pagineYOKOGAWADavide ContiNessuna valutazione finora
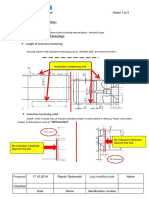
- Induction Hardening - Interpretation of Drawing & Testing PDFDocumento4 pagineInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHNessuna valutazione finora
- The Study of 220 KV Power Substation Equipment DetailsDocumento90 pagineThe Study of 220 KV Power Substation Equipment DetailsAman GauravNessuna valutazione finora
- AOAC 2012.11 Vitamin DDocumento3 pagineAOAC 2012.11 Vitamin DPankaj BudhlakotiNessuna valutazione finora
- Kuffner Final PresentationDocumento16 pagineKuffner Final PresentationSamaa GamalNessuna valutazione finora
- Poultry DiseasesDocumento5 paginePoultry DiseasesAnjum IslamNessuna valutazione finora
- Porta by AmbarrukmoDocumento4 paginePorta by AmbarrukmoRika AyuNessuna valutazione finora
- How Does Marijuana Affect The BrainDocumento3 pagineHow Does Marijuana Affect The BrainWanNurAtikahNessuna valutazione finora
- Philip Rance EAH Philo of ByzantiumDocumento3 paginePhilip Rance EAH Philo of ByzantiumstoliNessuna valutazione finora
- Standardization Parameters For Production of Tofu Using WSD-Y-1 MachineDocumento6 pagineStandardization Parameters For Production of Tofu Using WSD-Y-1 MachineAdjengIkaWulandariNessuna valutazione finora
- IMRAD - G1 PepperDocumento13 pagineIMRAD - G1 PepperRomero, Ken Angelo B.Nessuna valutazione finora
- Screenshot 2023-01-03 at 9.25.34 AM PDFDocumento109 pagineScreenshot 2023-01-03 at 9.25.34 AM PDFAzri ZakwanNessuna valutazione finora
- PPS120 Rev10 0309 PDFDocumento2 paginePPS120 Rev10 0309 PDFArfanAliNessuna valutazione finora
- r05320202 Microprocessors and Micro ControllersDocumento7 paginer05320202 Microprocessors and Micro ControllersSri LalithaNessuna valutazione finora
- NASA Technical Mem Randum: E-Flutter N78Documento17 pagineNASA Technical Mem Randum: E-Flutter N78gfsdg dfgNessuna valutazione finora
- 1 John 2:15-27 - Bible Commentary For PreachingDocumento6 pagine1 John 2:15-27 - Bible Commentary For PreachingJacob D. GerberNessuna valutazione finora
- Binge-Eating Disorder in AdultsDocumento19 pagineBinge-Eating Disorder in AdultsJaimeErGañanNessuna valutazione finora
- D6528-07 ASTM Standard Consolidated Undrained Direct Simple Shear Testing of Cohesive SoilsDocumento9 pagineD6528-07 ASTM Standard Consolidated Undrained Direct Simple Shear Testing of Cohesive SoilsDayana HernandezNessuna valutazione finora
- Guidelines On Dissolution Profile Comparison: Udrun ReitagDocumento10 pagineGuidelines On Dissolution Profile Comparison: Udrun ReitagRaju GawadeNessuna valutazione finora
- CV1000 CV2000 CV3000 Ice Cube Machines SpecsDocumento12 pagineCV1000 CV2000 CV3000 Ice Cube Machines SpecsAriel Godoy100% (1)
- Gps Vehicle Tracking System ProjectDocumento3 pagineGps Vehicle Tracking System ProjectKathrynNessuna valutazione finora
- Belden CatalogDocumento24 pagineBelden CatalogMani MaranNessuna valutazione finora
- The Creators College of Science & Commerce: 1 TermDocumento2 pagineThe Creators College of Science & Commerce: 1 TermJhangir Awan33% (3)
- Ninoy Aquino Parks and Wildlife CenterDocumento7 pagineNinoy Aquino Parks and Wildlife CenterNinia Richelle Angela AgaNessuna valutazione finora
- Schaeffler - Account Insights - Mar 2020Documento13 pagineSchaeffler - Account Insights - Mar 2020mohit negiNessuna valutazione finora
- Time and Work Assignments PDFDocumento8 pagineTime and Work Assignments PDFpavan0% (1)
- Com Statement (HT APFC22 - 02)Documento2 pagineCom Statement (HT APFC22 - 02)SOUMENNessuna valutazione finora
- Crimson Holdings Fact Sheet As of April 14Documento3 pagineCrimson Holdings Fact Sheet As of April 14WDIV/ClickOnDetroitNessuna valutazione finora