Potrebbero piacerti anche
- Finxter WorldsMostDensePythonCheatSheetDocumento1 paginaFinxter WorldsMostDensePythonCheatSheetmachnik1486624Nessuna valutazione finora
- Numerical Mathematics With MATLABDocumento66 pagineNumerical Mathematics With MATLABReza Abazari87% (15)
- ANSI ISA TR75.04.01 1998 CV Position StabilityDocumento20 pagineANSI ISA TR75.04.01 1998 CV Position StabilityMatthew RudyantoNessuna valutazione finora
- ArabicGeometricalPatterns PDFDocumento70 pagineArabicGeometricalPatterns PDFtobizarre100% (5)
- MATLAB programs for aeroelastic flutter and controlDocumento8 pagineMATLAB programs for aeroelastic flutter and controlcrimelife6Nessuna valutazione finora
- Simulate MIMO Channel Model in MATLABDocumento9 pagineSimulate MIMO Channel Model in MATLABManojLaraNessuna valutazione finora
- All All: Main - Ident.mDocumento10 pagineAll All: Main - Ident.mAndrés Santiago AriasNessuna valutazione finora
- Function: '/nlen - Full Is Not Equal To Sum of Lengths of Individual Layers'Documento18 pagineFunction: '/nlen - Full Is Not Equal To Sum of Lengths of Individual Layers'ankur_pkl20Nessuna valutazione finora
- nu3MATLAB CodesDocumento73 paginenu3MATLAB CodesbotametunosegaNessuna valutazione finora
- Acute Pndiode ModelingDocumento6 pagineAcute Pndiode ModelingViệt Hoàng NguyễnNessuna valutazione finora
- CLCDocumento3 pagineCLCHoàng Minh ÁiNessuna valutazione finora
- PLL DesignDocumento7 paginePLL DesignBhavin DesaiNessuna valutazione finora
- Secant MethodDocumento8 pagineSecant Methodsofianina05Nessuna valutazione finora
- Matlab Uas No 2 RapihDocumento4 pagineMatlab Uas No 2 RapihapriyandiNessuna valutazione finora
- MATLAB SimulationDocumento25 pagineMATLAB SimulationSaifullah KhalidNessuna valutazione finora
- Matlab code for Gauss-Newton method to determine polymer concentration parametersDocumento6 pagineMatlab code for Gauss-Newton method to determine polymer concentration parametersPearly Grace ResanoNessuna valutazione finora
- Function Normxcorr2Documento3 pagineFunction Normxcorr2informal77Nessuna valutazione finora
- Matlab ReportDocumento8 pagineMatlab Reporthurairabaig37Nessuna valutazione finora
- MATLAB m-files for DSP Chapter signalsDocumento35 pagineMATLAB m-files for DSP Chapter signalsHaroon HussainNessuna valutazione finora
- Listing Code Voice RecognitionDocumento11 pagineListing Code Voice RecognitionRivanto ParungNessuna valutazione finora
- Rosenbrock Function Optimization Using Gradient DescentDocumento27 pagineRosenbrock Function Optimization Using Gradient DescentlarasmoyoNessuna valutazione finora
- Matlab Programe For DesertationDocumento19 pagineMatlab Programe For DesertationVitthal PatnechaNessuna valutazione finora
- LMSPDocumento7 pagineLMSPPesta SigalinggingNessuna valutazione finora
- Matlab Programs for Signal Processing and Filter DesignDocumento11 pagineMatlab Programs for Signal Processing and Filter DesignSandy MoralesNessuna valutazione finora
- Optimize hybrid renewable systemDocumento8 pagineOptimize hybrid renewable system08mpe026Nessuna valutazione finora
- Codificacion-en-Matlab IFN°3Documento11 pagineCodificacion-en-Matlab IFN°3FernandoSerranoRamosNessuna valutazione finora
- PSODocumento4 paginePSOdinhsacNessuna valutazione finora
- 'Digite El Valor de N: ': CLC R 0 N Input I 1:n R R+i - 2Documento4 pagine'Digite El Valor de N: ': CLC R 0 N Input I 1:n R R+i - 2Diego Gonzalo Guerra CondoriNessuna valutazione finora
- MATLAB Codes For Diffraction Coefficients of Acoustic Elementary Fringe WavesDocumento3 pagineMATLAB Codes For Diffraction Coefficients of Acoustic Elementary Fringe WavesSonu BishnoiNessuna valutazione finora
- WGS-84 Extended Kalman Filter Radar Tracker ExampleDocumento9 pagineWGS-84 Extended Kalman Filter Radar Tracker ExampleEric BechhoeferNessuna valutazione finora
- Script File To Calculate The Fugacity of A Mixture Based On TheDocumento5 pagineScript File To Calculate The Fugacity of A Mixture Based On TheHoàng Minh ÁiNessuna valutazione finora
- Kinematics Library For MATLAB: Basilio BonaDocumento59 pagineKinematics Library For MATLAB: Basilio BonaEbaneo VkNessuna valutazione finora
- Nirkeen YolDocumento8 pagineNirkeen YolnikrooNessuna valutazione finora
- LAboratorio-metodos Numericos Modulo1Documento15 pagineLAboratorio-metodos Numericos Modulo1Seili Espinoza CarrilloNessuna valutazione finora
- Function To Generate PN SequenceDocumento2 pagineFunction To Generate PN SequenceFetsum LakewNessuna valutazione finora
- Scripting and plotting in MATLABDocumento1 paginaScripting and plotting in MATLABmansourNessuna valutazione finora
- Correlative Coding MATLAB CODEDocumento3 pagineCorrelative Coding MATLAB CODES. MagidiNessuna valutazione finora
- Appendices: Appendix A: Complete BEM CodeDocumento12 pagineAppendices: Appendix A: Complete BEM CodeJohn KerryNessuna valutazione finora
- SFC NodeDocumento8 pagineSFC Nodetayybahaseeb18Nessuna valutazione finora
- CocDocumento95 pagineCoczelalemaschaleyNessuna valutazione finora
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Documento25 pagineCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNessuna valutazione finora
- Kilian 2009 CodeDocumento25 pagineKilian 2009 CodeJongkol NaenonNessuna valutazione finora
- 1/22/13 11:58 AM C:/Users/Solo... /uwb - SV - Eval - CT - 15 - 4a.m 1 of 4Documento4 pagine1/22/13 11:58 AM C:/Users/Solo... /uwb - SV - Eval - CT - 15 - 4a.m 1 of 4Solo NunooNessuna valutazione finora
- Analysis of Forces and Displacements of Rigid Cylinders in CrossflowDocumento6 pagineAnalysis of Forces and Displacements of Rigid Cylinders in CrossflowBin LiuNessuna valutazione finora
- Exp 5Documento8 pagineExp 5alamin shawonNessuna valutazione finora
- DTMB Propeller GeometryDocumento17 pagineDTMB Propeller GeometryKivanc Ali ANILNessuna valutazione finora
- BinaryDocumento2 pagineBinaryNagaintheran Seluarize100% (1)
- EContent 2 2023 10 07 11 35 56 Experiment7pdf 2023 10 04 15 53 49Documento8 pagineEContent 2 2023 10 07 11 35 56 Experiment7pdf 2023 10 04 15 53 49shamsgamingstudioNessuna valutazione finora
- Circular Waveguide Microwave Engineering ProjectDocumento19 pagineCircular Waveguide Microwave Engineering ProjectGouse ModeenNessuna valutazione finora
- C09 - 1D Heat Transfer PlottingDocumento4 pagineC09 - 1D Heat Transfer PlottingMartike KharmagasNessuna valutazione finora
- MATLAB Files (PDF)Documento9 pagineMATLAB Files (PDF)Asad MeerNessuna valutazione finora
- ImmDocumento3 pagineImmZvonko RadosavljevicNessuna valutazione finora
- Lab ManualDocumento29 pagineLab ManualAnantharam RaoNessuna valutazione finora
- Verilog Modules For Common Digital FunctionsDocumento30 pagineVerilog Modules For Common Digital Functionssudarshan poojaryNessuna valutazione finora
- Newton RapsonDocumento6 pagineNewton RapsonManuel OrdoñezNessuna valutazione finora
- Optimizacón Con MatlabDocumento2 pagineOptimizacón Con MatlabEliseo Pillaca SichaNessuna valutazione finora
- Matlab LectureDocumento6 pagineMatlab Lecturekafle_yrsNessuna valutazione finora
- Lab 8 - 084Documento6 pagineLab 8 - 084Ashar AsifNessuna valutazione finora
- NOMA PlanDocumento25 pagineNOMA PlanIkram BenlabrycheNessuna valutazione finora
- Simulacion transformada ParkDocumento7 pagineSimulacion transformada ParkMarcos EspinozaNessuna valutazione finora
- PetrosDocumento2 paginePetrosratan3838Nessuna valutazione finora
- MATLAB Code Evaluates Extrapolation FactorsDocumento12 pagineMATLAB Code Evaluates Extrapolation FactorsMartina Marinković PlehatiNessuna valutazione finora
- Selo 1Documento26 pagineSelo 1kjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- 7SA522 CatalogueDocumento53 pagine7SA522 CataloguePhilip D'cruzNessuna valutazione finora
- Water Treatments: Steam Water Cycle TreatmentDocumento2 pagineWater Treatments: Steam Water Cycle TreatmentkjfenNessuna valutazione finora
- 74HC193 74HCT193: 17. Contact InformationDocumento2 pagine74HC193 74HCT193: 17. Contact InformationkjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- 7 Ways Signal Noise Can Impact Your Electrical EquipmentDocumento5 pagine7 Ways Signal Noise Can Impact Your Electrical EquipmentkjfenNessuna valutazione finora
- Temperature Monitoring: FaizanDocumento5 pagineTemperature Monitoring: FaizankjfenNessuna valutazione finora
- REG670Documento88 pagineREG670Rafael Hoffmann PaludoNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- Load Forecasting and Standardized Load CurvesDocumento10 pagineLoad Forecasting and Standardized Load CurveskjfenNessuna valutazione finora
- 74HC193 74HCT193: 14. AbbreviationsDocumento2 pagine74HC193 74HCT193: 14. AbbreviationskjfenNessuna valutazione finora
- Sub 131Documento10 pagineSub 131kjfenNessuna valutazione finora
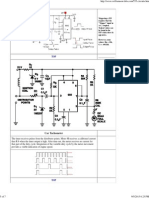
- 555 Timer Tutorial - How to Build CircuitsDocumento1 pagina555 Timer Tutorial - How to Build CircuitskjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- Timer Tutorials 555Documento1 paginaTimer Tutorials 555kjfenNessuna valutazione finora
- 74HC HCT193Documento2 pagine74HC HCT193kjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
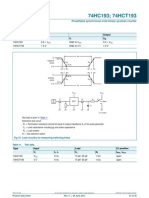
- 74HC193 74HCT193: 13. Package OutlineDocumento2 pagine74HC193 74HCT193: 13. Package OutlinekjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocumento2 pagine74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocumento2 pagine74HC193 74HCT193: 10. Dynamic CharacteristicskjfenNessuna valutazione finora
- 74HC193 74HCT193: 9. Static CharacteristicsDocumento2 pagine74HC193 74HCT193: 9. Static CharacteristicskjfenNessuna valutazione finora
- 74HC193 74HCT193: 5. Pinning InformationDocumento2 pagine74HC193 74HCT193: 5. Pinning InformationkjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 pagine74HC193 74HCT193: NXP SemiconductorskjfenNessuna valutazione finora
- Find The LCM of The Following NumbersDocumento1 paginaFind The LCM of The Following NumbersSumantra MukherjeeNessuna valutazione finora
- Bihar Board Solutions: Bihar Board 12th Maths Objective Answers Chapter 12 Linear ProgrammingDocumento8 pagineBihar Board Solutions: Bihar Board 12th Maths Objective Answers Chapter 12 Linear ProgrammingSanjayNessuna valutazione finora
- Numerical Lab Assignment2Documento11 pagineNumerical Lab Assignment2Ramo comNessuna valutazione finora
- Bma1202 Discrete Mathematics AssignmentDocumento3 pagineBma1202 Discrete Mathematics AssignmentcyrusNessuna valutazione finora
- Wittgenstein, Ludwig - Lectures On PhilosophyDocumento42 pagineWittgenstein, Ludwig - Lectures On PhilosophymNessuna valutazione finora
- Gram Schmidt and QR PDFDocumento2 pagineGram Schmidt and QR PDFBikash SaikhomNessuna valutazione finora
- 1st Monthlytest Math 8Documento3 pagine1st Monthlytest Math 8Dexter CarpioNessuna valutazione finora
- Preboard-1 Set-1 ModifiedDocumento5 paginePreboard-1 Set-1 ModifiedTasha sharmaNessuna valutazione finora
- Lecture 4 - Basic Probabaility Theory - FullDocumento26 pagineLecture 4 - Basic Probabaility Theory - FullJJFbjedNessuna valutazione finora
- Modul 11: Matriks: (Bam) Modul Matematik SPMDocumento2 pagineModul 11: Matriks: (Bam) Modul Matematik SPMbalkisNessuna valutazione finora
- Course Syllabus Ge 4 Rev. 2Documento8 pagineCourse Syllabus Ge 4 Rev. 2Jhanna Vee DamaleNessuna valutazione finora
- Explaining Uncertainty in Nonlinear Regression ModelsDocumento14 pagineExplaining Uncertainty in Nonlinear Regression Modelsjhawner raul cruz nietoNessuna valutazione finora
- Edward Huntington - A Set of Postulates For Abstract Geometry, Expressed in Terms of The Simple Relation of InclusionDocumento38 pagineEdward Huntington - A Set of Postulates For Abstract Geometry, Expressed in Terms of The Simple Relation of Inclusionforeigner_2103Nessuna valutazione finora
- APCFRPractice232 PDFDocumento5 pagineAPCFRPractice232 PDFJoseLuis MalagaNessuna valutazione finora
- 01 ProbabilityDocumento7 pagine01 ProbabilityJoseNessuna valutazione finora
- Cambridge International AS & A Level: Mathematics 9709/13Documento16 pagineCambridge International AS & A Level: Mathematics 9709/13akapogodsonNessuna valutazione finora
- Nicholas A. Rossi: ObjectiveDocumento1 paginaNicholas A. Rossi: Objectivenrossi147Nessuna valutazione finora
- Review MODULE: - MATHEMATICS (Algebra-Worded Problems)Documento1 paginaReview MODULE: - MATHEMATICS (Algebra-Worded Problems)YeddaMIlaganNessuna valutazione finora
- KC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDocumento17 pagineKC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDarabaGabriellNessuna valutazione finora
- BankSoalan Cikgujep Com Johor Add Maths P1 2017Documento41 pagineBankSoalan Cikgujep Com Johor Add Maths P1 2017Loh Chee WeiNessuna valutazione finora
- Extracting Function From Word ProblemsDocumento13 pagineExtracting Function From Word Problemsecruz_yhwh100% (1)
- Answers Homework Rate of Change - PDF - 1631015984Documento7 pagineAnswers Homework Rate of Change - PDF - 1631015984Omar HeshamNessuna valutazione finora
- Solutions to the 79th William Lowell Putnam Mathematical CompetitionDocumento8 pagineSolutions to the 79th William Lowell Putnam Mathematical CompetitionWeihanZhang100% (1)
- Mathematical Finance Exam QuestionsDocumento7 pagineMathematical Finance Exam Questionssofia goicocheaNessuna valutazione finora
- MSC 1 Sem Mathematics Numerical Analysis 11170 Summer 2019Documento2 pagineMSC 1 Sem Mathematics Numerical Analysis 11170 Summer 201964210017Nessuna valutazione finora
- WS16-Irrational Exponents and Exponential FunctionsDocumento1 paginaWS16-Irrational Exponents and Exponential FunctionssakyamathNessuna valutazione finora
- Review Module 1-Algebra 1-Part 1Documento1 paginaReview Module 1-Algebra 1-Part 1Andrea MagtutoNessuna valutazione finora